You might also like
- CLEANING AND CORROSION CONTROLDocument31 pagesCLEANING AND CORROSION CONTROLHyori AnapadaNo ratings yet
- Activated Alumina OverviewDocument6 pagesActivated Alumina OverviewIka Silvia AnggraeniNo ratings yet
- Unmanned Underwater Vehicles The Future PDFDocument15 pagesUnmanned Underwater Vehicles The Future PDFPavan KumarNo ratings yet
- Unmanned Undersea Vehicle (UUV) Sensor Data Formats: Standard Guide ForDocument11 pagesUnmanned Undersea Vehicle (UUV) Sensor Data Formats: Standard Guide ForAhmad Zubair RasulyNo ratings yet
- LOW POWER STIRLING ENGINE FOR UNDERWATER APPLICATIONSDocument6 pagesLOW POWER STIRLING ENGINE FOR UNDERWATER APPLICATIONSVladimirDvortsovNo ratings yet
- Introduction To SonarDocument31 pagesIntroduction To SonarzakiannuarNo ratings yet
- Understanding SONAR: A Guide to Sound Navigation and RangingDocument27 pagesUnderstanding SONAR: A Guide to Sound Navigation and RangingRalph Lorenz Hortillosa100% (1)
- A Seminar On Supercavitation Principle & ApplicationsDocument26 pagesA Seminar On Supercavitation Principle & ApplicationsdeepNo ratings yet
- Chimie FormuleDocument4 pagesChimie FormulewizlanNo ratings yet
- Masaferro Et Al 2003 TLEDocument8 pagesMasaferro Et Al 2003 TLEPatrick EllisNo ratings yet
- Metals and AlloysDocument45 pagesMetals and AlloysAdhyt Tya PratamaNo ratings yet
- Design Analysis of Light StructuresDocument17 pagesDesign Analysis of Light StructuresgligamsnNo ratings yet
- Development in Underwater Robotic Vehicles-URVDocument9 pagesDevelopment in Underwater Robotic Vehicles-URVSMI2012No ratings yet
- Hydrogen RD in Sa Report Nov2018Document68 pagesHydrogen RD in Sa Report Nov2018Luthfi Rais100% (2)
- Hydrogen RD in Sa Report Nov2018Document68 pagesHydrogen RD in Sa Report Nov2018Luthfi Rais100% (2)
- Collapse of Cavitation BubblesDocument348 pagesCollapse of Cavitation BubblesVincent J. CataldiNo ratings yet
- Moorthy Viva Voce PPT-02!08!14Document55 pagesMoorthy Viva Voce PPT-02!08!14Moorthy GNo ratings yet
- Comparison of Quickbird and Hymap For Marine Habitats Map of Isla Del Caño. Proceedings of The 32nd Symposium of Remote Sensing.Document10 pagesComparison of Quickbird and Hymap For Marine Habitats Map of Isla Del Caño. Proceedings of The 32nd Symposium of Remote Sensing.Ana Cecilia Fonseca EscalanteNo ratings yet
- Basic Sonar System (Active) PDFDocument18 pagesBasic Sonar System (Active) PDFthejerskiNo ratings yet
- Super CavitationDocument25 pagesSuper Cavitationpp2030100% (2)
- Astm B308 - 6061-T6Document6 pagesAstm B308 - 6061-T6Aman Sharma100% (1)
- Cavitation Inception and NumberDocument12 pagesCavitation Inception and NumberrajeevNo ratings yet
- Minea SaesDocument2 pagesMinea SaesschelcherjNo ratings yet
- Integration of Bulbous Bow and SONAR DomeDocument18 pagesIntegration of Bulbous Bow and SONAR DomeNikhil Ambattuparambil GopiNo ratings yet
- A Study On The Design Optimization of An AUV by Using Computational Fluid Dynamic AnalysisDocument7 pagesA Study On The Design Optimization of An AUV by Using Computational Fluid Dynamic AnalysisSalma SherbazNo ratings yet
- Underwater Acoustic Noise Measurement of VesselsDocument6 pagesUnderwater Acoustic Noise Measurement of VesselsJohn KaruwalNo ratings yet
- Development Depth Control and Stability Analysis of An Underwater Remotely Operated Vehicle ROVDocument6 pagesDevelopment Depth Control and Stability Analysis of An Underwater Remotely Operated Vehicle ROVSuman SahaNo ratings yet
- Autonomous Underwater VehicleDocument6 pagesAutonomous Underwater VehicleKiran Kumar50% (2)
- The HUGIN Concept, HUGIN As A Multi Purpose Platform For Marine Research.Document8 pagesThe HUGIN Concept, HUGIN As A Multi Purpose Platform For Marine Research.Ruben PatelNo ratings yet
- Autonomous Underwater VehicleDocument9 pagesAutonomous Underwater VehicleManas BajpaiNo ratings yet
- Stealth Philosophy, Real SolutionsDocument10 pagesStealth Philosophy, Real SolutionsSunil Kumar P GNo ratings yet
- Advanced CavitationDocument41 pagesAdvanced CavitationVincent J. CataldiNo ratings yet
- Aplicaciones MilitaresDocument4 pagesAplicaciones MilitaresMabel NúñezNo ratings yet
- The 4 - 95 Stirling Engine For Underwater ApplicationDocument4 pagesThe 4 - 95 Stirling Engine For Underwater ApplicationVladimirDvortsovNo ratings yet
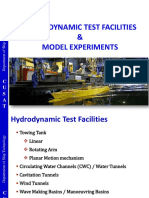
- Hydrodynamic Test Facilities PDFDocument34 pagesHydrodynamic Test Facilities PDFDarshanNo ratings yet
- B.Tech Mid-Term Project Presentation 2012: Ms - Deepani Rath (ECE200963236)Document18 pagesB.Tech Mid-Term Project Presentation 2012: Ms - Deepani Rath (ECE200963236)mahadevkartikNo ratings yet
- Twin Screw PropulsionDocument1 pageTwin Screw Propulsionsansun1924No ratings yet
- Proposal of A Groove Cavitator On A Supercavitation PropellerDocument5 pagesProposal of A Groove Cavitator On A Supercavitation PropellerMNirooeiNo ratings yet
- Ocean Eagle 43MHDocument2 pagesOcean Eagle 43MHB7r100% (1)
- 1 History: TitanicDocument24 pages1 History: TitanicChaitanya VarmaNo ratings yet
- The Development of the Multibeam Echosounder: A Historical AccountDocument2 pagesThe Development of the Multibeam Echosounder: A Historical AccountKim Kiki ZaenuriNo ratings yet
- Design of Polymer Composite Shell Structures for UUV ApplicationsDocument60 pagesDesign of Polymer Composite Shell Structures for UUV ApplicationsMoorthy Govindaraj0% (1)
- Defeating The Mine Threat: Peter B NilssonDocument37 pagesDefeating The Mine Threat: Peter B Nilssonahmed mohamedNo ratings yet
- Advanced Degaussing SystemsDocument8 pagesAdvanced Degaussing Systemsaks180181No ratings yet
- Advances in Unmanned Underwater Vehicles TechnologDocument15 pagesAdvances in Unmanned Underwater Vehicles TechnologBurak PalaNo ratings yet
- DegaussingDocument14 pagesDegaussingRoma GunawanNo ratings yet
- Cavitation Bubble Microjet DynamicsDocument11 pagesCavitation Bubble Microjet DynamicsVincent J. CataldiNo ratings yet
- Super Cavitation and Its Application in SubmarinesDocument22 pagesSuper Cavitation and Its Application in Submarinesaksh2206No ratings yet
- NATO Navies Face 21st Century Mine ThreatDocument79 pagesNATO Navies Face 21st Century Mine ThreatZahid Hameed QaziNo ratings yet
- Mine Warfare Trends Analysis Under 40 CharactersDocument33 pagesMine Warfare Trends Analysis Under 40 CharactersJulia MinnullinaNo ratings yet
- Submarine - WikipediaDocument32 pagesSubmarine - WikipediaNaheed100% (1)
- Minewarfare 1995Document212 pagesMinewarfare 1995Pepe MarquezNo ratings yet
- New Types of Multi-Hull Ships for Passenger TransportDocument12 pagesNew Types of Multi-Hull Ships for Passenger TransportKaren Katherine FaSaNo ratings yet
- 15th Numerical Towing Tank SymposiumDocument223 pages15th Numerical Towing Tank SymposiumYuriyAK100% (1)
- Echo Surveyor VI Flyer PDFDocument2 pagesEcho Surveyor VI Flyer PDFThomas ThomasNo ratings yet
- Ebooks - Acoustic Systems Descriptions PDFDocument14 pagesEbooks - Acoustic Systems Descriptions PDFgurit_perdanaNo ratings yet
- Talisman UUVDocument2 pagesTalisman UUVhw606No ratings yet
- Modeling and Control of an Unmanned Underwater VehicleDocument119 pagesModeling and Control of an Unmanned Underwater Vehiclearash501No ratings yet
- Evaluation of em Propagation ModelsDocument162 pagesEvaluation of em Propagation ModelsoldjanusNo ratings yet
- Sounding The DepthDocument84 pagesSounding The DepthBùi Trường GiangNo ratings yet
- UUV Final Primer FormattedDocument8 pagesUUV Final Primer FormattedJay ZNo ratings yet
- Supercavitating PropellerDocument3 pagesSupercavitating PropellerfaisalzhuidaNo ratings yet
- Autonomous Underwater VehicleDocument5 pagesAutonomous Underwater VehicleBiswajit PadhiNo ratings yet
- Torque Control of A Seperate-Winding Excitation DC Motor For DynamometerDocument77 pagesTorque Control of A Seperate-Winding Excitation DC Motor For DynamometerhafidzfbNo ratings yet
- Wildlife and Wind Farms - Conflicts and Solutions: Onshore: Monitoring and MitigationFrom EverandWildlife and Wind Farms - Conflicts and Solutions: Onshore: Monitoring and MitigationMartin PerrowNo ratings yet
- Reduce Ship Noise GuidelinesDocument8 pagesReduce Ship Noise Guidelineshamid moaieriNo ratings yet
- Power Sources For Autonomous Underwater Vehicles: Øistein Hasvold, Nils J. Størkersen, Sissel Forseth, Torleif LianDocument8 pagesPower Sources For Autonomous Underwater Vehicles: Øistein Hasvold, Nils J. Størkersen, Sissel Forseth, Torleif LianmspetroNo ratings yet
- Test MethanolDocument23 pagesTest MethanolLuthfi RaisNo ratings yet
- COP26 Glasgow Article 6 ExplainerDocument5 pagesCOP26 Glasgow Article 6 ExplainerLuthfi RaisNo ratings yet
- Carbon Pricing Dashboard OverviewDocument2 pagesCarbon Pricing Dashboard OverviewLuthfi RaisNo ratings yet
- Carbon Pricing Dashboard - Up-To-date Overview of Carbon Pricing InitiativesDocument2 pagesCarbon Pricing Dashboard - Up-To-date Overview of Carbon Pricing InitiativesLuthfi RaisNo ratings yet
- The Clean Development Mechanism: A User'S GuideDocument6 pagesThe Clean Development Mechanism: A User'S GuideLuthfi RaisNo ratings yet
- Carbon Pricing Dashboard OverviewDocument2 pagesCarbon Pricing Dashboard OverviewLuthfi RaisNo ratings yet
- Https Icapcarbonaction - Com en Option Com Etsmap&task Export&format Pdf&layout List&systems 51Document5 pagesHttps Icapcarbonaction - Com en Option Com Etsmap&task Export&format Pdf&layout List&systems 51Luthfi RaisNo ratings yet
- The Clean Development Mechanism: A User'S GuideDocument6 pagesThe Clean Development Mechanism: A User'S GuideLuthfi RaisNo ratings yet
- COP26 Glasgow Article 6 ExplainerDocument5 pagesCOP26 Glasgow Article 6 ExplainerLuthfi RaisNo ratings yet
- COP26 Glasgow Article 6 ExplainerDocument5 pagesCOP26 Glasgow Article 6 ExplainerLuthfi RaisNo ratings yet
- Indopacific Program 2020Document4 pagesIndopacific Program 2020Luthfi RaisNo ratings yet
- COP26 Glasgow Article 6 ExplainerDocument5 pagesCOP26 Glasgow Article 6 ExplainerLuthfi RaisNo ratings yet
- Indopacific Program 2020Document4 pagesIndopacific Program 2020Luthfi RaisNo ratings yet
- Indopacific Program 2020Document4 pagesIndopacific Program 2020Luthfi RaisNo ratings yet
- How Does A Hammer Mill Work - Rev1Document1 pageHow Does A Hammer Mill Work - Rev1محمد عبدالدايمNo ratings yet
- H2 Uptake PDFDocument25 pagesH2 Uptake PDFLuthfi RaisNo ratings yet
- IptcDocument6 pagesIptcLuthfi RaisNo ratings yet
- TesDocument1 pageTesLuthfi RaisNo ratings yet
- 18 01 Fall 2005 Lecture 15Document7 pages18 01 Fall 2005 Lecture 15Luthfi RaisNo ratings yet
- Example P8Document1 pageExample P8Luthfi RaisNo ratings yet
- 18 01 Fall 2005 Lecture 15Document7 pages18 01 Fall 2005 Lecture 15Luthfi RaisNo ratings yet
- Example 8Document1 pageExample 8Luthfi RaisNo ratings yet
- Hilirisasi Produk Dan Kandungan Lokal: Aluminium Billet & Alloy PT Inalum (Persero) Location: Kuala Tanjung, Sum-UtDocument15 pagesHilirisasi Produk Dan Kandungan Lokal: Aluminium Billet & Alloy PT Inalum (Persero) Location: Kuala Tanjung, Sum-Utfarhan fahmiNo ratings yet
- Generating Creativity in Chemistry Teaching and LearningDocument27 pagesGenerating Creativity in Chemistry Teaching and LearningFiz HassanNo ratings yet
- 2 - AIChE Journal, Vol. 51, No. 11, (November 2005) PDFDocument204 pages2 - AIChE Journal, Vol. 51, No. 11, (November 2005) PDFRodrigo CastroNo ratings yet
- Catalog Ledux OfficeDocument46 pagesCatalog Ledux OfficeIuliaDamianNo ratings yet
- Chapter-3 Metals and Non-Metals MCQsDocument13 pagesChapter-3 Metals and Non-Metals MCQsfagstdjdNo ratings yet
- Aluminium AI: Physical PropertiesDocument2 pagesAluminium AI: Physical PropertiesmaaathanNo ratings yet
- Hot Plates, Hot Plates Stirrers - CatalogDocument8 pagesHot Plates, Hot Plates Stirrers - Catalogdéborah_rosalesNo ratings yet
- Kaiser Aluminum Alloy 6033: A Superior ReplacementDocument4 pagesKaiser Aluminum Alloy 6033: A Superior ReplacementAhmed KandeelNo ratings yet
- Hindalco Annual Report FY2008-09Document156 pagesHindalco Annual Report FY2008-09Gaurav SharmaNo ratings yet
- Procedures of Experiments and Reading Materials For The Experiments Offer by NN Ghosh in CE II PDFDocument41 pagesProcedures of Experiments and Reading Materials For The Experiments Offer by NN Ghosh in CE II PDFshreyas patelNo ratings yet
- Aluminium ADC12Document1 pageAluminium ADC12Gowtham Raj KNo ratings yet
- 2010 PBT e InternetDocument20 pages2010 PBT e InternetMohammed RiyazNo ratings yet
- Solution Manual For Information Technology Project Management 9th Edition Kathy SchwalbeDocument34 pagesSolution Manual For Information Technology Project Management 9th Edition Kathy Schwalbemanequin.design8haoij100% (42)
- Recruitment and Selection at NALCODocument98 pagesRecruitment and Selection at NALCOakash moharanaNo ratings yet
- Module-1 Overview of Civil Engineering SystemsDocument20 pagesModule-1 Overview of Civil Engineering SystemsManvanth B CNo ratings yet
- Chemistry For Engineers 3Document34 pagesChemistry For Engineers 3Audrey VicenteNo ratings yet
- Aluminum 6082-T4: Metal Nonferrous Metal Aluminum Alloy 6000 Series Aluminum AlloyDocument1 pageAluminum 6082-T4: Metal Nonferrous Metal Aluminum Alloy 6000 Series Aluminum AlloydeepscubNo ratings yet
- Occurrence of Arsenic Contamination in Canada: Sources, Behavior and DistributionDocument21 pagesOccurrence of Arsenic Contamination in Canada: Sources, Behavior and Distributionespirilo1659100% (1)
- Innovations in Precision Grinding AbrasivesDocument21 pagesInnovations in Precision Grinding AbrasivesDaniel FigueiredoNo ratings yet
- Stripping Solution Section Processing Solution Immersion ElectrolyticDocument2 pagesStripping Solution Section Processing Solution Immersion ElectrolyticDavid WongNo ratings yet
- Dwnload Full Labor Economics 7th Edition George Borjas Test Bank PDFDocument35 pagesDwnload Full Labor Economics 7th Edition George Borjas Test Bank PDFjosiahdunnmg100% (11)
- Aluminum Louver Model ZALDocument6 pagesAluminum Louver Model ZALShappan Abd AllhaNo ratings yet
- A New Anode Material For Oxygen Evolution in Molten Oxide ElectrolysisDocument6 pagesA New Anode Material For Oxygen Evolution in Molten Oxide ElectrolysisjnNo ratings yet
- Light Anhydrous Silicic Acid 1572Document2 pagesLight Anhydrous Silicic Acid 1572TrinhphuongNo ratings yet