You might also like
- PowerFactory Applications for Power System AnalysisFrom EverandPowerFactory Applications for Power System AnalysisFrancisco M. Gonzalez-LongattNo ratings yet
- Overcurrent Relay Advances for Modern Electricity NetworksFrom EverandOvercurrent Relay Advances for Modern Electricity NetworksNo ratings yet
- Aalborg Universitet: Dragicevic, Tomislav Wheeler, Patrick Blaabjerg, FredeDocument12 pagesAalborg Universitet: Dragicevic, Tomislav Wheeler, Patrick Blaabjerg, FredeHajmunnisaNo ratings yet
- Dynamically Reconfigurable Energy Aware Modular SoftwareDocument8 pagesDynamically Reconfigurable Energy Aware Modular Softwarewang123218888No ratings yet
- Concepts For Designing Low Power Wireless Sensor Network: Bahareh Gholamzadeh, and Hooman NabovatiDocument7 pagesConcepts For Designing Low Power Wireless Sensor Network: Bahareh Gholamzadeh, and Hooman Nabovatisunxing22No ratings yet
- An Efficient Wireless Noc With Congestion-Aware Routing For Multicore ChipsDocument5 pagesAn Efficient Wireless Noc With Congestion-Aware Routing For Multicore ChipsHimanshu PatelNo ratings yet
- Optimal Coordination of Directional Overcurrent Relays Using A New Time-Current-Voltage CharacteristicDocument8 pagesOptimal Coordination of Directional Overcurrent Relays Using A New Time-Current-Voltage CharacteristicAdam MoodyNo ratings yet
- Optimal Frequency 1-S2.0-S2210537916301755-Am - s0Document24 pagesOptimal Frequency 1-S2.0-S2210537916301755-Am - s0ausiasllorencNo ratings yet
- 2.06095515-Compiler-Directed Energy Reduction Using Dynamic Voltage Scaling and Voltage Islands For Embedded SystemsDocument11 pages2.06095515-Compiler-Directed Energy Reduction Using Dynamic Voltage Scaling and Voltage Islands For Embedded SystemsPhan Giang ChâuNo ratings yet
- Power Quality Monitoring of Distributed Generation Units Using A Web-Based ApplicationDocument6 pagesPower Quality Monitoring of Distributed Generation Units Using A Web-Based ApplicationVelu SamyNo ratings yet
- Accelerated Real-Time Simulations of Reactive Power Control 03 09 2019Document8 pagesAccelerated Real-Time Simulations of Reactive Power Control 03 09 2019Mike MekkanenNo ratings yet
- Inverter Modelling Techniques For Protection Studies: Thomas Wijnhoven, Jeroen Tant and Geert DeconinckDocument8 pagesInverter Modelling Techniques For Protection Studies: Thomas Wijnhoven, Jeroen Tant and Geert Deconinckali didebanNo ratings yet
- Feasibility Study of Pervasive Computing Approach For Energy Management in MobilesDocument8 pagesFeasibility Study of Pervasive Computing Approach For Energy Management in MobilesIAEME PublicationNo ratings yet
- Real Time Monitoring of Distribution System Based On State EstimationDocument10 pagesReal Time Monitoring of Distribution System Based On State EstimationMohammad reza eesazadehNo ratings yet
- System-Level Power-Aware Design Techniques in Real-Time SystemsDocument15 pagesSystem-Level Power-Aware Design Techniques in Real-Time SystemsHans ThomasNo ratings yet
- Verifying Interoperability and Application Performance of Pmus and Pmu-Enabled Ieds at The Device and System LevelDocument3 pagesVerifying Interoperability and Application Performance of Pmus and Pmu-Enabled Ieds at The Device and System Levela_damrongNo ratings yet
- Docslide - Us Hardware Assisted Energy Monitoring Architecture For Micro Sensor NodesDocument13 pagesDocslide - Us Hardware Assisted Energy Monitoring Architecture For Micro Sensor NodesRameshNo ratings yet
- Measurement-Based Estimation of Linear Sensitivity Distribution Factors and ApplicationsDocument11 pagesMeasurement-Based Estimation of Linear Sensitivity Distribution Factors and ApplicationsamirrezafeyziNo ratings yet
- PubDat 188476Document15 pagesPubDat 188476Mohamed AlmortadaNo ratings yet
- Modeling Techniques and Stability Analysis Tools For Grid-Connected ConvertersDocument18 pagesModeling Techniques and Stability Analysis Tools For Grid-Connected ConvertersEletricaNo ratings yet
- Jasr, 1 (7), PP 366-375Document12 pagesJasr, 1 (7), PP 366-375osamaNo ratings yet
- Intelligent Fault Analysis in Electrical Power Grids: 2017 International Conference On Tools With Artificial IntelligenceDocument6 pagesIntelligent Fault Analysis in Electrical Power Grids: 2017 International Conference On Tools With Artificial IntelligenceSunil PradhanNo ratings yet
- Quanto: Tracking Energy in Networked Embedded SystemsDocument16 pagesQuanto: Tracking Energy in Networked Embedded SystemsNarasimha KulkarniNo ratings yet
- Types of Circuit Breaker and Its Application in Su - En.es PDFDocument8 pagesTypes of Circuit Breaker and Its Application in Su - En.es PDFYesica CarrilloNo ratings yet
- Lossless EEG Compression Algorithm Based On SemiDocument84 pagesLossless EEG Compression Algorithm Based On Semivsangvai26No ratings yet
- Adaptive MPC Current Control-4Document8 pagesAdaptive MPC Current Control-4sainadh saiNo ratings yet
- Profiling The Energy Footprint of Network Protocols Models and Results.Document15 pagesProfiling The Energy Footprint of Network Protocols Models and Results.sk kNo ratings yet
- Quasi-Static Voltage Scaling For Energy Minimization With Time ConstraintsDocument14 pagesQuasi-Static Voltage Scaling For Energy Minimization With Time ConstraintsNguyen Van ToanNo ratings yet
- 32-An Overview of Real Time Hardware-In-The-loop Capabilities in Digital Simulation For Electric MicrogridsDocument6 pages32-An Overview of Real Time Hardware-In-The-loop Capabilities in Digital Simulation For Electric MicrogridsZyad GhaziNo ratings yet
- Active Management of Distributed Energy Resources Using Standardized Communications and Modern Information TechnologiesDocument9 pagesActive Management of Distributed Energy Resources Using Standardized Communications and Modern Information TechnologiesRonaldo TourinhoNo ratings yet
- IEA AIE 2019 - Short PaperDocument12 pagesIEA AIE 2019 - Short PaperYosra NajarNo ratings yet
- Energy Harvesting Sensor Nodes - Survey and ImplicationsDocument19 pagesEnergy Harvesting Sensor Nodes - Survey and ImplicationsJagdishNo ratings yet
- Fault Diagnosis in MLIDocument8 pagesFault Diagnosis in MLIGp NAYAGRAH ELECTRICALNo ratings yet
- Voltage SagDocument6 pagesVoltage SagcaetanoNo ratings yet
- Short Circuit Current CalculationDocument8 pagesShort Circuit Current CalculationRaulNo ratings yet
- Power Systems 6Document4 pagesPower Systems 6Sai Pavan Kumar NandigamNo ratings yet
- 494-Article Text-1970-1-4-20201110Document27 pages494-Article Text-1970-1-4-20201110Daniela Beltrán SaavedraNo ratings yet
- 8 Topics With Abstracts: Rapid Prototyping For The Development of Powertrain Control SystemsDocument4 pages8 Topics With Abstracts: Rapid Prototyping For The Development of Powertrain Control SystemsVikram SaiNo ratings yet
- Superimposed - Swing (Dec 2022) PDFDocument11 pagesSuperimposed - Swing (Dec 2022) PDFSubhadeep PaladhiNo ratings yet
- Electrical Energy Consumption MonitoringDocument3 pagesElectrical Energy Consumption MonitoringMihaela BocaiNo ratings yet
- 1 s2.0 S0142061522004884 MainDocument12 pages1 s2.0 S0142061522004884 MainjhumaranibeuraNo ratings yet
- A Review On Stability Analysis Methods For Switching Mode Power ConvertersDocument14 pagesA Review On Stability Analysis Methods For Switching Mode Power ConvertersSandhya Rathore PrasadNo ratings yet
- Heydt-2010-The Next GenerationDocument11 pagesHeydt-2010-The Next GenerationErick LopezNo ratings yet
- Error Correcting Codes in Wireless Sensor Networks: An Energy PerspectiveDocument10 pagesError Correcting Codes in Wireless Sensor Networks: An Energy PerspectiveSaddam ShahNo ratings yet
- A HW/SW Co-Design Methodology: An Accurate Power Efficiency Model and Design Metrics For Embedded SystemDocument5 pagesA HW/SW Co-Design Methodology: An Accurate Power Efficiency Model and Design Metrics For Embedded SystemShivarth SharmaNo ratings yet
- Judicious Data Management For Sustaining An Energy Harvesting Sensor Node Kaumudi Singh Prabhakar Con - Com - 2020Document13 pagesJudicious Data Management For Sustaining An Energy Harvesting Sensor Node Kaumudi Singh Prabhakar Con - Com - 2020lola yupNo ratings yet
- Sustainability 11 07209Document16 pagesSustainability 11 07209Mihir RanaNo ratings yet
- Energy Consumption in Wireless Sensor NetworkDocument5 pagesEnergy Consumption in Wireless Sensor Networkram prakashNo ratings yet
- Simulation Softwares For REDocument5 pagesSimulation Softwares For REyoussefNo ratings yet
- The Framework of Advanced Distribution Management SystemDocument5 pagesThe Framework of Advanced Distribution Management SystemBehrouz AzimianNo ratings yet
- Reliability Guaranteed Efficient Data Gathering in Wireless Sensor NetworksDocument15 pagesReliability Guaranteed Efficient Data Gathering in Wireless Sensor NetworksAhmed HusseinNo ratings yet
- Smart PlugDocument5 pagesSmart PlugMCV101No ratings yet
- Investig 1Document16 pagesInvestig 1Jonny E. RodriguezNo ratings yet
- Test Set Validation For Home Electrical Signal DisaggregationDocument6 pagesTest Set Validation For Home Electrical Signal DisaggregationKalthoum ZaoualiNo ratings yet
- Stability Analysis and Controller Design of DC Microgrids With Constant Power LoadDocument8 pagesStability Analysis and Controller Design of DC Microgrids With Constant Power Loadpavan gangwarNo ratings yet
- CloudSim DVFS PDFDocument16 pagesCloudSim DVFS PDFjorisdudaNo ratings yet
- An Objective Analysis of Micro-Synchrophasors Technology For Monitoring and Control of Active Distribution NetworkDocument10 pagesAn Objective Analysis of Micro-Synchrophasors Technology For Monitoring and Control of Active Distribution Networkmohd zuhaibNo ratings yet
- Power Systems Protection Coordination and Associated Reliability With Smart Grid SecurityDocument6 pagesPower Systems Protection Coordination and Associated Reliability With Smart Grid SecurityPavan Kumar A GNo ratings yet
- Distributed Large-Scale Co-Simulation For Iot-Aided Smart Grid ControlDocument10 pagesDistributed Large-Scale Co-Simulation For Iot-Aided Smart Grid ControldikyNo ratings yet
- Computer Power System AnalysisDocument155 pagesComputer Power System AnalysisSamir ElabasiryNo ratings yet
- Industrial EnclosuresDocument56 pagesIndustrial Enclosuresanmol6237No ratings yet
- Sri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet NoDocument1 pageSri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet Noanmol6237No ratings yet
- Clients ListDocument4 pagesClients Listanmol6237No ratings yet
- Nissan Walkin Chennai 1Document2 pagesNissan Walkin Chennai 1anmol6237No ratings yet
- Sri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet NoDocument2 pagesSri Ganapathi Industries Kushaiguda Title: Scale Size DRWG No: Sheet Noanmol6237No ratings yet
- Tool Design TerminologyDocument5 pagesTool Design Terminologyanmol6237No ratings yet
- Press Tool Cutting ForceDocument1 pagePress Tool Cutting Forceanmol6237No ratings yet
- E2SEM1MT2TD06102012Document3 pagesE2SEM1MT2TD06102012anmol6237No ratings yet
- Train Schedule: From Bhopal To Indore JN BG (INBD) BPL - INBD PassengerDocument1 pageTrain Schedule: From Bhopal To Indore JN BG (INBD) BPL - INBD Passengeranmol6237No ratings yet
- SHEARINGDocument6 pagesSHEARINGanmol6237No ratings yet
- Concept Design With Creo 2.0: Special ReportDocument5 pagesConcept Design With Creo 2.0: Special Reportanmol6237No ratings yet
- Ceed Model Question PaperDocument21 pagesCeed Model Question PaperSatvender SinghNo ratings yet
- Class Room SchedulerDocument2 pagesClass Room Scheduleranmol6237No ratings yet
- Lab SaftwareDocument3 pagesLab Saftwareanmol6237No ratings yet
- Product Name Target Achieved Yet To GoDocument1 pageProduct Name Target Achieved Yet To Goanmol6237No ratings yet
- THEORY CLASS BATCH SCHEDULE FROM 4/11/2013 To 9/11/2013 HARISH.R (11am - 09pm)Document4 pagesTHEORY CLASS BATCH SCHEDULE FROM 4/11/2013 To 9/11/2013 HARISH.R (11am - 09pm)anmol6237No ratings yet
- Vector Controller Based Speed Control of Induction Motor Drive With 3-Level SVPWM Based Inverter PDFDocument11 pagesVector Controller Based Speed Control of Induction Motor Drive With 3-Level SVPWM Based Inverter PDF1balamanianNo ratings yet
- Printer Circuit Board RelaysDocument23 pagesPrinter Circuit Board Relaysphyo7799No ratings yet
- Brosur TransectorDocument72 pagesBrosur TransectorPT Bumi Raya PerkasaNo ratings yet
- Module 1 AlternatorsDocument34 pagesModule 1 AlternatorsIan Guieb100% (1)
- Which Microcontroller Consumes The Lowest Power ConsumptionDocument6 pagesWhich Microcontroller Consumes The Lowest Power Consumptiongk.mobm33No ratings yet
- PF520 - User ManualDocument244 pagesPF520 - User ManualJonatan Zayas ValdezNo ratings yet
- AozDocument16 pagesAozAndreNo ratings yet
- Magentic LocksDocument1 pageMagentic LocksashrookpNo ratings yet
- Generating Sets: Standard Genset SpecificationsDocument2 pagesGenerating Sets: Standard Genset SpecificationsSAMINo ratings yet
- A Technique For Improving Input Current Zero-Crossing Distortion of Boost PFC Converters For Airborne SystemDocument7 pagesA Technique For Improving Input Current Zero-Crossing Distortion of Boost PFC Converters For Airborne SystemInternational Journal of Research in Engineering and ScienceNo ratings yet
- Warning Caution: ECM3000 Control Motor User's ManualDocument8 pagesWarning Caution: ECM3000 Control Motor User's ManualLukaszNo ratings yet
- Dual N-Channel Enhancement Mode Mosfet: DSS DS (ON) D ADocument5 pagesDual N-Channel Enhancement Mode Mosfet: DSS DS (ON) D AKarim KarimmNo ratings yet
- Samsung CAC (Console) Service ManualDocument111 pagesSamsung CAC (Console) Service Manualsonic8659100% (1)
- EEHA Inspection Sheet TemplateDocument3 pagesEEHA Inspection Sheet Templatedavid.bradley83No ratings yet
- Electrical Products Presentation - SI EPDocument33 pagesElectrical Products Presentation - SI EPkassem WreidanNo ratings yet
- Option Details: Synchrotact 6Document1 pageOption Details: Synchrotact 6Žarko MočnikNo ratings yet
- Tower AccessoriesDocument2 pagesTower AccessoriesmulualemNo ratings yet
- Power Pack DC40 ManualDocument22 pagesPower Pack DC40 ManualBoris KalachnikovNo ratings yet
- DX100Document16 pagesDX100sahanagopalNo ratings yet
- MCP3421 DatasheetDocument42 pagesMCP3421 DatasheetgblackweNo ratings yet
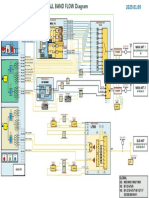
- RF All Band Flow Diagram: TransceiverDocument1 pageRF All Band Flow Diagram: Transceiveryus sulbanNo ratings yet
- Aci FeDocument15 pagesAci FeHankNo ratings yet
- MAN SICAM P850 P855 7KG85xx V2.2 USDocument302 pagesMAN SICAM P850 P855 7KG85xx V2.2 USIvanNo ratings yet
- Dat-Sh FT ENDocument1 pageDat-Sh FT ENchris patosNo ratings yet
- 7+formulas TransistorsDocument11 pages7+formulas TransistorsMark kervin natividadNo ratings yet
- Pcs-Unit-Ii MCQDocument6 pagesPcs-Unit-Ii MCQDPL SataraNo ratings yet
- LC320EM1Document90 pagesLC320EM1Luis TorresNo ratings yet
- Tesys U - A4 - Tesys U - P - enDocument38 pagesTesys U - A4 - Tesys U - P - enlaloedu472No ratings yet
- Ch6 Mosfets HSD - LSD Part 1Document77 pagesCh6 Mosfets HSD - LSD Part 1sathyaeeeNo ratings yet
- FSC10 System TI en 10Document16 pagesFSC10 System TI en 10Mauricio Benjamin Pozo AceitunoNo ratings yet