You might also like
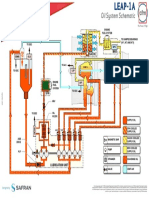
- LEAP-1A A3 79-Oil System Rev2.0Document1 pageLEAP-1A A3 79-Oil System Rev2.0SatishReddy100% (2)
- Piping Engineering Manhours Estimation Hours Per ActivityDocument4 pagesPiping Engineering Manhours Estimation Hours Per ActivityZeeshan Ahuja100% (7)
- BMW SM CSDocument74 pagesBMW SM CSWei Xun Chin100% (4)
- Thin Airfoil TheoryDocument10 pagesThin Airfoil TheoryAli Al-hamalyNo ratings yet
- Flight Control Design Using BacksteppingDocument8 pagesFlight Control Design Using BacksteppinggarridolopezNo ratings yet
- Thin Airfoil TheoryDocument10 pagesThin Airfoil TheoryAli Al-hamalyNo ratings yet
- Spectral MethodDocument6 pagesSpectral MethodTung Dang100% (1)
- The PVTOL AircraftDocument16 pagesThe PVTOL AircraftZolecito RiveraNo ratings yet
- 2 The PVTOL AircraftDocument16 pages2 The PVTOL AircraftLuz RiveraNo ratings yet
- BLOCK 2 Computer Graphics IgnouDocument87 pagesBLOCK 2 Computer Graphics IgnouDanielle PerryNo ratings yet
- Ada283906 PDFDocument20 pagesAda283906 PDFChandrahas ReddyNo ratings yet
- CH 11Document15 pagesCH 11Tahir FidanNo ratings yet
- Control Design LVDocument11 pagesControl Design LVRajib PalNo ratings yet
- Experiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveDocument11 pagesExperiment 106. Stabilisation of A Rotary Inverted Pendulum 1 ObjectiveAmine Y. AlamiNo ratings yet
- 2 Kinematics and Dynamics of A ParticleDocument13 pages2 Kinematics and Dynamics of A ParticleLincs lincolnNo ratings yet
- Stability of Linear Feedback SystemDocument49 pagesStability of Linear Feedback SystemNANDHAKUMAR ANo ratings yet
- Earth Curvature For HighpointersDocument29 pagesEarth Curvature For HighpointersJulca Gonza MelissaNo ratings yet
- Missile Roll Control Part IV - Modern Control ApproachDocument8 pagesMissile Roll Control Part IV - Modern Control ApproachD.ViswanathNo ratings yet
- Kuliah 3 2024Document8 pagesKuliah 3 2024Prima DinoNo ratings yet
- Datum Transformations of GPS PositionsDocument12 pagesDatum Transformations of GPS Positionsgordon_greeneNo ratings yet
- 2.1 Thrust Required at CruiseDocument13 pages2.1 Thrust Required at Cruisebalamurali sNo ratings yet
- Attitude Control of A QuadrotorDocument6 pagesAttitude Control of A QuadrotorGhada BeydounNo ratings yet
- Theodorsen Theory For Deformable Airfoils Full DerivationDocument15 pagesTheodorsen Theory For Deformable Airfoils Full Derivationknk89100% (1)
- Appendix A20 Lecture 2037 2022-12-2011Document14 pagesAppendix A20 Lecture 2037 2022-12-2011Chegrani AhmedNo ratings yet
- AssignmentDocument12 pagesAssignmentSamuel TanNo ratings yet
- More Maximumminimum Problems. Reflection and RefractionDocument6 pagesMore Maximumminimum Problems. Reflection and RefractionRaul Humberto Mora VillamizarNo ratings yet
- Anna's AssignmentDocument16 pagesAnna's Assignmenttumaini murrayNo ratings yet
- ME311 Autumn2020 EndSem FinalVersionDocument4 pagesME311 Autumn2020 EndSem FinalVersionVarun PathakNo ratings yet
- ME2135-2 Lab Manual (Flow Over An Airfoil)Document19 pagesME2135-2 Lab Manual (Flow Over An Airfoil)meowyNo ratings yet
- Kinema TicsDocument66 pagesKinema TicsManauwar AnsariNo ratings yet
- Chapter 13Document55 pagesChapter 13Ahsanul Amin ShantoNo ratings yet
- School of Computing, Engineering and Mathematics Semester 2 Examinations 2011/2012Document9 pagesSchool of Computing, Engineering and Mathematics Semester 2 Examinations 2011/2012Kish ShenoyNo ratings yet
- Flight Control Design Using Backstepping PDFDocument8 pagesFlight Control Design Using Backstepping PDFIvan RamirezNo ratings yet
- Flow CalculationsDocument22 pagesFlow CalculationsJay VoraNo ratings yet
- Ken I MaticsDocument45 pagesKen I MaticsEdward OropezaNo ratings yet
- MECH3271-Chapter-02 2007 08Document11 pagesMECH3271-Chapter-02 2007 08Osvaldo M. QuerinNo ratings yet
- Part 1Document90 pagesPart 1Saeid SamiezadehNo ratings yet
- Vectors: Topic 37: Coordinate Systems and Coordinate TransformationsDocument12 pagesVectors: Topic 37: Coordinate Systems and Coordinate Transformationscloud_012No ratings yet
- Ejercicios Gregory Capitulo 14Document5 pagesEjercicios Gregory Capitulo 14Gabriel BonomiNo ratings yet
- Constrained Predictive Control of A Servo-Driven Tracking TurretDocument6 pagesConstrained Predictive Control of A Servo-Driven Tracking TurretVu Duc TruongNo ratings yet
- Esign For A: AbstractDocument5 pagesEsign For A: Abstractsattanic666No ratings yet
- Strokes TheoremDocument42 pagesStrokes Theorem徐子裕No ratings yet
- Inverse Kinematics Problem (Ikp) of 6-Dof Manipulator by Locally Recurrent Neural Networks (LRNNS)Document5 pagesInverse Kinematics Problem (Ikp) of 6-Dof Manipulator by Locally Recurrent Neural Networks (LRNNS)yousif al mashhadanyNo ratings yet
- c1 PDFDocument52 pagesc1 PDFMuhammad Naseer 1965-FBAS/MSCMA/F19No ratings yet
- Innovative Project Proposal On "Simulation of PR Controller''Document14 pagesInnovative Project Proposal On "Simulation of PR Controller''prajeet95No ratings yet
- Mathematical Model of A Pendulum On A CartDocument5 pagesMathematical Model of A Pendulum On A CartMohammed MushtahaNo ratings yet
- CentroidDocument19 pagesCentroidragupathiindia100% (1)
- D - Horizontal Alignment and Super ElevationDocument22 pagesD - Horizontal Alignment and Super ElevationAva CastilloNo ratings yet
- An Application of Mixed Sensitivity Control Method in Direct Drive Electro Hydraulic Servo SystemDocument8 pagesAn Application of Mixed Sensitivity Control Method in Direct Drive Electro Hydraulic Servo SystemG. ANo ratings yet
- Comparison Between Full Order and Minimum Order Observer Controller For DC MotorDocument6 pagesComparison Between Full Order and Minimum Order Observer Controller For DC MotorInternational Journal of Research and DiscoveryNo ratings yet
- Images De-Noising With Mapshrink Estimate and Dual-Threshold in Curvelet DomainDocument5 pagesImages De-Noising With Mapshrink Estimate and Dual-Threshold in Curvelet DomainjebileeNo ratings yet
- Hy Using A New Statistically Optimal (N975) Patch Near-Field Acoustical Holograp MethodDocument8 pagesHy Using A New Statistically Optimal (N975) Patch Near-Field Acoustical Holograp MethodWon-young SeoNo ratings yet
- 4825398Document46 pages4825398SatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument1 pagePlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- DissertationDocument2 pagesDissertationSatishReddyNo ratings yet
- Sample CV For Engineering Students - CV Formats / TemplatesDocument4 pagesSample CV For Engineering Students - CV Formats / TemplatesSatishReddyNo ratings yet
- Wireless Sensor Networks ApplicationsDocument8 pagesWireless Sensor Networks ApplicationsanantiaNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- 1 C 0 DDocument7 pages1 C 0 DSatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- ATR 72-212A 01 of 2016Document1 pageATR 72-212A 01 of 2016SatishReddyNo ratings yet
- Plagiarism Scan Report: Content Checked For PlagiarismDocument3 pagesPlagiarism Scan Report: Content Checked For PlagiarismSatishReddyNo ratings yet
- Evolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemDocument7 pagesEvolutionofaircraftflightcontrolsystemandfly by LightflightcontrolsystemSatishReddyNo ratings yet
- Application of Wireless Sensor Networks To AircrafDocument7 pagesApplication of Wireless Sensor Networks To AircrafSatishReddyNo ratings yet
- Journal Article Without DOIDocument2 pagesJournal Article Without DOISatishReddyNo ratings yet
- 05 of 2015 (General)Document1 page05 of 2015 (General)SatishReddyNo ratings yet
- Dgca Module 11 Part 06Document19 pagesDgca Module 11 Part 06SatishReddyNo ratings yet
- 03 Outline Evaluation Sheet 1Document2 pages03 Outline Evaluation Sheet 1SatishReddyNo ratings yet
- 07 of 2015Document1 page07 of 2015SatishReddyNo ratings yet
- 04 Sensors AircraftDocument3 pages04 Sensors AircraftSatishReddyNo ratings yet
- M11 May 2018Document8 pagesM11 May 2018SatishReddyNo ratings yet
- 06 of 2015Document3 pages06 of 2015SatishReddyNo ratings yet
- 02 Outline ReportDocument3 pages02 Outline ReportSatishReddyNo ratings yet
- f7 Special PermitDocument5 pagesf7 Special PermitSingh Vineet Kumar -No ratings yet
- 1212Document36 pages1212Sumeet PandeyNo ratings yet
- Approved Course Mto TRV PDFDocument1 pageApproved Course Mto TRV PDFSatishReddyNo ratings yet
- 1212Document36 pages1212Sumeet PandeyNo ratings yet
- Module 3 QsDocument44 pagesModule 3 QsSatishReddyNo ratings yet
- Select and Answer 10 Problems Correctly To Obtain Perfect Score (10 Points Per Problem) - You May Answer More Than 10 Problems. However, Maximum Score Is Limited To 100 PointsDocument9 pagesSelect and Answer 10 Problems Correctly To Obtain Perfect Score (10 Points Per Problem) - You May Answer More Than 10 Problems. However, Maximum Score Is Limited To 100 PointsKRISTINE MIRANDANo ratings yet
- 04-Keynote SIGOS New Perspectives For Customer Experience TestingDocument24 pages04-Keynote SIGOS New Perspectives For Customer Experience TestingkaouechNo ratings yet
- Lecture 6 - Special Purpose Diodes - 2Document26 pagesLecture 6 - Special Purpose Diodes - 2Willian CarlosNo ratings yet
- GX1000 B Quick Reference ManualDocument26 pagesGX1000 B Quick Reference ManualRafał KwaśnyNo ratings yet
- Xspider ManualDocument236 pagesXspider Manualady_marinescuNo ratings yet
- Flex GP Digital Imaging Plate Flex HR Digital Imaging Plate Flex XL Blue Digital Imaging PlateDocument2 pagesFlex GP Digital Imaging Plate Flex HR Digital Imaging Plate Flex XL Blue Digital Imaging PlateOriana Gabriela Amache RomanoNo ratings yet
- Restricted Earth Fault ProtectionDocument3 pagesRestricted Earth Fault ProtectionFatima MirNo ratings yet
- Speed Control of DC Motor With 8051: Food Living Outside Play Technology WorkshopDocument7 pagesSpeed Control of DC Motor With 8051: Food Living Outside Play Technology WorkshopKarthik KadavaNo ratings yet
- Brian's Toys Product Catalog #82Document32 pagesBrian's Toys Product Catalog #82Brian's Toys, Inc.No ratings yet
- Strongwall Shearwalls CatalogDocument116 pagesStrongwall Shearwalls CataloggullipalliNo ratings yet
- Laboratory 1 - Water ContentDocument7 pagesLaboratory 1 - Water ContentChristian Paul LaysaNo ratings yet
- Gn001 Application Guide: Design With Gan Enhancement Mode HemtDocument44 pagesGn001 Application Guide: Design With Gan Enhancement Mode HemtTuan TranNo ratings yet
- Blade-Resolved CFD Simulations of A Periodic Array of NREL 5 MW Rotors With and Without TowersDocument17 pagesBlade-Resolved CFD Simulations of A Periodic Array of NREL 5 MW Rotors With and Without Towersmirage_et_rafale9572No ratings yet
- Ducati Diavel ABS WiringDocument1 pageDucati Diavel ABS WiringKhoảng LặngNo ratings yet
- Schott Brochure Schott Vials English Us 20092017Document28 pagesSchott Brochure Schott Vials English Us 20092017Tomena ÁkosNo ratings yet
- A Non-Silver Manual (Sarah Van Keuren)Document119 pagesA Non-Silver Manual (Sarah Van Keuren)Anestis AlexandridisNo ratings yet
- JText FieldDocument45 pagesJText FielddrsolicNo ratings yet
- 3D MaxDocument7 pages3D Maxfcmitc100% (1)
- Bank Mandate FormDocument1 pageBank Mandate Formsrm payable100% (2)
- 4-H Communications Toolkit 4H1560 PDFDocument179 pages4-H Communications Toolkit 4H1560 PDFMistor Dupois WilliamsNo ratings yet
- Astm 1735Document3 pagesAstm 1735jchemNo ratings yet
- Level Gauges - SNK/SNKK Series: SpecificationsDocument1 pageLevel Gauges - SNK/SNKK Series: SpecificationsAbraham Del cid FloresNo ratings yet
- 65RFE 6L80E Tcra Diagnosing Results TCRA 2016: AND Technical Insight From With Consistent Don'T MissDocument68 pages65RFE 6L80E Tcra Diagnosing Results TCRA 2016: AND Technical Insight From With Consistent Don'T Missbyungchul kim100% (1)
- CSA Direct Acting Valves 8.2017Document42 pagesCSA Direct Acting Valves 8.2017dalla nabilNo ratings yet
- High Frequency Transformer For Switch-Mode Power SupplyDocument154 pagesHigh Frequency Transformer For Switch-Mode Power Supplybibicul1958No ratings yet
- Actuator Controls Ac 01.2/acexc 01.2: Operation and Setting ManualDocument160 pagesActuator Controls Ac 01.2/acexc 01.2: Operation and Setting ManualJorge Antonio Lovera CastroNo ratings yet
- B 221Document12 pagesB 221manuel flores100% (1)
- Ags 688Document2 pagesAgs 688dsimovic100% (1)