You might also like
- Be Instrumentation Control Syllabus CourseDocument43 pagesBe Instrumentation Control Syllabus CourseVikas KharavalikarNo ratings yet
- Control Systems and Instrumentation Lab GuideDocument3 pagesControl Systems and Instrumentation Lab GuideskrtamilNo ratings yet
- Optimal Control: Linear Quadratic MethodsFrom EverandOptimal Control: Linear Quadratic MethodsRating: 4 out of 5 stars4/5 (2)
- EC1352 Antenna Wave PropagationDocument44 pagesEC1352 Antenna Wave Propagationjackdbomber100% (7)
- Control System Design: PID, Compensation, State SpaceDocument2 pagesControl System Design: PID, Compensation, State SpaceBharath PulavarthiNo ratings yet
- Ec 1304 Control SystemsDocument2 pagesEc 1304 Control SystemsMohamed Abdul RahimNo ratings yet
- EC1304 Control Systems Course OverviewDocument1 pageEC1304 Control Systems Course OverviewAnupama RaghavendranNo ratings yet
- Ec1304control SystemsDocument2 pagesEc1304control SystemsKanishka MageshwaranNo ratings yet
- BEEE303L_CONTROL-SYSTEMS_TH_1.0_67_Control SystemsDocument3 pagesBEEE303L_CONTROL-SYSTEMS_TH_1.0_67_Control SystemsMohit SubramaniamNo ratings yet
- Department of Electronics and Communication Lesson Plan: TH NDDocument4 pagesDepartment of Electronics and Communication Lesson Plan: TH NDshadiqengineer0% (1)
- EE259 CONTROL SYSTEMS OverviewDocument1 pageEE259 CONTROL SYSTEMS OverviewPraharsha Vardhan ReddyNo ratings yet
- E2 Linear Control Systems SyllabusDocument2 pagesE2 Linear Control Systems SyllabussasikalaNo ratings yet
- Syllabus Control Systems ECE R13Document2 pagesSyllabus Control Systems ECE R13tansnvarmaNo ratings yet
- IC301 Control Engineering-IDocument3 pagesIC301 Control Engineering-IAKSHAY KRISHNA K RNo ratings yet
- BE Instrumentation Syllabus 2011 Pune UniversityDocument34 pagesBE Instrumentation Syllabus 2011 Pune Universityksahil2410No ratings yet
- CS Syllabus JntukDocument2 pagesCS Syllabus JntukEEE CRRNo ratings yet
- Control Systems OverviewDocument3 pagesControl Systems OverviewSai tejaswiNo ratings yet
- Ec 8391 Cs Auqp Merged 8.5.19Document31 pagesEc 8391 Cs Auqp Merged 8.5.19sivaNo ratings yet
- MEC308 CONTROL ENGINEERINGDocument2 pagesMEC308 CONTROL ENGINEERINGAlakshendra JohariNo ratings yet
- WWW - Srmuniv.ac - in Downloads Eee-Curriculam 2009onwardsDocument2 pagesWWW - Srmuniv.ac - in Downloads Eee-Curriculam 2009onwardsvishiwizardNo ratings yet
- Control System EngineeringDocument3 pagesControl System Engineeringnisarg0% (1)
- JNTU Control Systems Course OverviewDocument1 pageJNTU Control Systems Course OverviewappuamreddyNo ratings yet
- Linear Control TheoryDocument1 pageLinear Control TheorySanjay SinhaNo ratings yet
- Control System EngineeringDocument2 pagesControl System EngineeringGokulNo ratings yet
- Controls SyllabusDocument2 pagesControls SyllabusArshiya Kousar MNo ratings yet
- Control Unit 1Document37 pagesControl Unit 1AnshNo ratings yet
- 749481Document3 pages749481PAULSON K ANTONY 17BEC1147100% (1)
- Eee3001 Control-Systems Eth 1.0 37 Eee3001Document3 pagesEee3001 Control-Systems Eth 1.0 37 Eee3001dhoniNo ratings yet
- Automatic Control (ME1401)Document2 pagesAutomatic Control (ME1401)Mehroos AliNo ratings yet
- Control SystemsDocument160 pagesControl SystemsPintu DeyNo ratings yet
- Bmee308l Control-Systems TH 1.0 67 Bmee308lDocument3 pagesBmee308l Control-Systems TH 1.0 67 Bmee308lKrijayNo ratings yet
- UEE2476 CSE SyllabusDocument3 pagesUEE2476 CSE SyllabusAmoga LekshmiNo ratings yet
- Ee 44 Control SystemsDocument1 pageEe 44 Control SystemsgavinilaaNo ratings yet
- Control Systems Course ObjectivesDocument2 pagesControl Systems Course ObjectivesVinopraba ThirumavalavanNo ratings yet
- Industrial Instrumentation 05EE 62XXDocument56 pagesIndustrial Instrumentation 05EE 62XXwhiteelephant93No ratings yet
- Control SystemsDocument2 pagesControl SystemsrahulwasthereNo ratings yet
- Jntuk B.tech 4-2 r13 EeeDocument33 pagesJntuk B.tech 4-2 r13 EeeKanisetty JanardanNo ratings yet
- JNTU CONTROL SYSTEMS COURSE OVERVIEWDocument2 pagesJNTU CONTROL SYSTEMS COURSE OVERVIEWAbhishek KumarNo ratings yet
- 6th Sem EEE 18Document28 pages6th Sem EEE 18Iqbal Ahammed KaladgikarNo ratings yet
- CEPhgnacs EE376 Ugeven 23Document2 pagesCEPhgnacs EE376 Ugeven 23Meet Shah.No ratings yet
- MLRS R20 - CS SyllabusDocument2 pagesMLRS R20 - CS Syllabusrupa kumar dhanavathNo ratings yet
- EE484 Control SystemsDocument2 pagesEE484 Control Systemssaheedahmd0112No ratings yet
- Industrial Electronics Optical Instrumentation Cdma MBSD Process Control Lab ProjectDocument8 pagesIndustrial Electronics Optical Instrumentation Cdma MBSD Process Control Lab ProjectKarthik NairNo ratings yet
- Instrumentation EngineeringDocument34 pagesInstrumentation Engineeringvaithy1990No ratings yet
- Ece2010 Control-Systems Eth 2.1 49 Ece2010 14Document2 pagesEce2010 Control-Systems Eth 2.1 49 Ece2010 14sartgNo ratings yet
- Ec6405control System Engineering SyllabusDocument2 pagesEc6405control System Engineering SyllabusmaheshboobalanNo ratings yet
- Feedback Control System SyllabusDocument3 pagesFeedback Control System SyllabusDamanMakhijaNo ratings yet
- Courses of Study: T. Y. B. Tech. (Instrumentation) For The Batch Registering in 2006-07Document20 pagesCourses of Study: T. Y. B. Tech. (Instrumentation) For The Batch Registering in 2006-07Vaibhav SinghNo ratings yet
- CS SyllabusDocument2 pagesCS SyllabusEEE ACEECNo ratings yet
- Course Outcome and Program Outcome For Course Control System EngineeringDocument7 pagesCourse Outcome and Program Outcome For Course Control System Engineeringralu_mnbNo ratings yet
- Rajalakshmi Engineering College Control Systems Course FileDocument36 pagesRajalakshmi Engineering College Control Systems Course FilerevathisenthilNo ratings yet
- Control Systems Course OutlineDocument3 pagesControl Systems Course OutlineWaqar AliNo ratings yet
- Gujarat Technological University: Mechanical Engineering (19) SUBJECT CODE: 2151908Document3 pagesGujarat Technological University: Mechanical Engineering (19) SUBJECT CODE: 2151908Mulu GirmayNo ratings yet
- Control Systems: Dr. Anilesh DeyDocument20 pagesControl Systems: Dr. Anilesh DeyTanay ChakrabortyNo ratings yet
- Be Electrical Engg 2008 SyllabusDocument40 pagesBe Electrical Engg 2008 SyllabusGaurav sNo ratings yet
- SallyubusDocument61 pagesSallyubusravindra898233No ratings yet
- Postgraduate M E Instrumentation and ControlDocument8 pagesPostgraduate M E Instrumentation and Controljricardo019763535No ratings yet
- Control System Design: An Introduction to State-Space MethodsFrom EverandControl System Design: An Introduction to State-Space MethodsRating: 3 out of 5 stars3/5 (2)
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsFrom EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsNo ratings yet
- Nature-Inspired Optimization Algorithms for Fuzzy Controlled Servo SystemsFrom EverandNature-Inspired Optimization Algorithms for Fuzzy Controlled Servo SystemsNo ratings yet
- NothingDocument2 pagesNothingSaurabhBishtNo ratings yet
- Class 1-20Document149 pagesClass 1-20SaurabhBisht100% (1)
- Op AmpDocument29 pagesOp AmpvhinzsanguinaryNo ratings yet
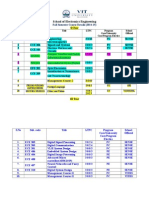
- Fall Semester Course Details (2014-15)Document3 pagesFall Semester Course Details (2014-15)SaurabhBishtNo ratings yet
- Cse201 Introduction-To-Algorithms TH 1.00 Ac16Document1 pageCse201 Introduction-To-Algorithms TH 1.00 Ac16netgalaxy2010No ratings yet
- Java 8 Interview QuestionsDocument31 pagesJava 8 Interview QuestionsAmit Sharma100% (2)
- WCS1400 / WCS1400S: FeaturesDocument7 pagesWCS1400 / WCS1400S: FeaturesbahrowiadiNo ratings yet
- AMCP 706-185, Military Pyrotechnics - Theory and ApplicationDocument270 pagesAMCP 706-185, Military Pyrotechnics - Theory and ApplicationASDAFF ASADNo ratings yet
- Selection: Open-Type Reciprocating Compressors: Input ValuesDocument1 pageSelection: Open-Type Reciprocating Compressors: Input ValuesYuli RahmawatiNo ratings yet
- KujiDocument17 pagesKujiGorumbha Dhan Nirmal Singh100% (2)
- General Physics1 Q2 W8 Module8 ThermodynamicsDocument23 pagesGeneral Physics1 Q2 W8 Module8 ThermodynamicsRegine Ann ViloriaNo ratings yet
- IMS2 Manual EngDocument61 pagesIMS2 Manual EngJhonatan BuenoNo ratings yet
- An Intelligent Algorithm For The Protection of Smart Power SystemsDocument8 pagesAn Intelligent Algorithm For The Protection of Smart Power SystemsAhmed WestministerNo ratings yet
- Operation & Service Manual For Cable Tensiometer: SeriesDocument28 pagesOperation & Service Manual For Cable Tensiometer: SeriesJonatan BernalNo ratings yet
- Eee f111 Electrical Sciences1Document3 pagesEee f111 Electrical Sciences1aryan mittalNo ratings yet
- Dimensional Analysis AND Similarity: Chapter-5. (Frank White)Document46 pagesDimensional Analysis AND Similarity: Chapter-5. (Frank White)ShujaAmjadNo ratings yet
- Computational Intelligence in Communications and Business AnalyticsDocument369 pagesComputational Intelligence in Communications and Business AnalyticsSourasish NathNo ratings yet
- Iygb Gce: Mathematics MP2 Advanced LevelDocument7 pagesIygb Gce: Mathematics MP2 Advanced Levelsingh cos tanNo ratings yet
- Kollidon 30 Technical InformationDocument10 pagesKollidon 30 Technical InformationhomarearisugawaNo ratings yet
- Diffusion Weber and MorrisDocument12 pagesDiffusion Weber and MorrisFarah El ShahawyNo ratings yet
- 1-Newton Second Law-ForMATDocument5 pages1-Newton Second Law-ForMATVAIBHAV KUMARNo ratings yet
- Wound ScaleDocument4 pagesWound ScaleHumam SyriaNo ratings yet
- Chapter 3 Step Wise An Approach To Planning Software Projects 976242065Document31 pagesChapter 3 Step Wise An Approach To Planning Software Projects 976242065RiajiminNo ratings yet
- Multi-Band Booster With HRLB - In-Band Routed DCN Solution GuideDocument26 pagesMulti-Band Booster With HRLB - In-Band Routed DCN Solution GuideAchintha AluthmanageNo ratings yet
- Financial Accounting IIDocument16 pagesFinancial Accounting IIMiguel BuenoNo ratings yet
- A Conjunction Is The Glue That Holds WordsDocument2 pagesA Conjunction Is The Glue That Holds WordsYamson MillerJrNo ratings yet
- 250+ C Programs for Practice PDF Free DownloadDocument13 pages250+ C Programs for Practice PDF Free Downloadsubhanshu sahuNo ratings yet
- Binder Modul WMS 10Document52 pagesBinder Modul WMS 10sandhiakhmadNo ratings yet
- Calculation For Short Circuit Current Calculation Using IEC / IEEE StandardDocument11 pagesCalculation For Short Circuit Current Calculation Using IEC / IEEE StandardibmmoizNo ratings yet
- Guaranteed Restore Points Oracle 11g - Flash Back to SCN or RP (39Document2 pagesGuaranteed Restore Points Oracle 11g - Flash Back to SCN or RP (39PraveenNo ratings yet
- Speedrunfile 1Document26 pagesSpeedrunfile 1Adrian AquinoNo ratings yet
- Nov. AbwDocument50 pagesNov. Abwjbyarkpawolo70No ratings yet
- Ee242 Lect06 TwoportsDocument32 pagesEe242 Lect06 TwoportsZyad IskandarNo ratings yet
- Inductive TransducersDocument12 pagesInductive TransducersMUKESH SUNDARARAJANNo ratings yet
- Planetary AlignmentDocument7 pagesPlanetary AlignmentEbn MisrNo ratings yet