You might also like
- CHM110 SyllabusDocument8 pagesCHM110 SyllabusradsraNo ratings yet
- CS1032 CourseOutlineDocument2 pagesCS1032 CourseOutlineRanu GamesNo ratings yet
- ECE 306L Discrete Signals LabDocument2 pagesECE 306L Discrete Signals LabJohn Paul DulayNo ratings yet
- MAGA Training ReportDocument56 pagesMAGA Training ReportChaturanga WagaArachchige67% (3)
- Assignment 1 (Total Marks: 70) EEE 323: Power System IIDocument2 pagesAssignment 1 (Total Marks: 70) EEE 323: Power System IIShahriar SauravNo ratings yet
- Eee335 Syllabus F09Document2 pagesEee335 Syllabus F09David GangerNo ratings yet
- Electronic Circuits and Systems: Website Class TADocument2 pagesElectronic Circuits and Systems: Website Class TAJackieNo ratings yet
- CHEM 14CL Course Syllabus For W14Document2 pagesCHEM 14CL Course Syllabus For W14gabbersibNo ratings yet
- MECE 4372 Controls Lab Fall 2011Document2 pagesMECE 4372 Controls Lab Fall 2011redundancy2000No ratings yet
- Ece 101-204Document3 pagesEce 101-204PremNo ratings yet
- EE-371 Control Systems S2021Document4 pagesEE-371 Control Systems S2021Skiwordy MediaNo ratings yet
- Cse 114 Syllabus f17Document4 pagesCse 114 Syllabus f17urbedglvbhNo ratings yet
- 14CL Course Syllabus For Su13Document3 pages14CL Course Syllabus For Su13Marion StricklandNo ratings yet
- ISEN 320 - Operations Research I (Fall 2017)Document4 pagesISEN 320 - Operations Research I (Fall 2017)sam256256No ratings yet
- Syl-EEL 3123 Fall 2014Document7 pagesSyl-EEL 3123 Fall 2014tomNo ratings yet
- ECE 3704 Continuous and Discrete SystemsDocument4 pagesECE 3704 Continuous and Discrete SystemstenpointerNo ratings yet
- Electronics Course OutlineDocument10 pagesElectronics Course OutlineRuben CollinsNo ratings yet
- Syde 352Document10 pagesSyde 352alldaylam3No ratings yet
- EE460: Power Electronics: King Fahd University of Petroleum and MineralsDocument3 pagesEE460: Power Electronics: King Fahd University of Petroleum and MineralstasniNo ratings yet
- 2014 EME165 Heat Transfer SyllabusDocument2 pages2014 EME165 Heat Transfer SyllabusLaura CraigNo ratings yet
- IOE 265 Probability and Statistics For Engineers - Winter 2004 Section 200Document5 pagesIOE 265 Probability and Statistics For Engineers - Winter 2004 Section 200Amsalu WalelignNo ratings yet
- Textbook:: The University of Alabama in Huntsville ECE Department Course Syllabus CPE 422/522 01 Spring 2005Document4 pagesTextbook:: The University of Alabama in Huntsville ECE Department Course Syllabus CPE 422/522 01 Spring 2005Mark Anthony EgagamaoNo ratings yet
- Eet 2325C - 14136 - F12Document4 pagesEet 2325C - 14136 - F12kokobilizarizoneNo ratings yet
- Electric Circuit Analysis Lab: Electrical Engineering Department The University of Texas at ArlingtonDocument5 pagesElectric Circuit Analysis Lab: Electrical Engineering Department The University of Texas at ArlingtonmsraiNo ratings yet
- 153L S17 SyllabusDocument5 pages153L S17 SyllabusProfessingProfessorNo ratings yet
- ECE200 Circuits Study GuideDocument133 pagesECE200 Circuits Study GuideƬhôngßáo MesseƞgerNo ratings yet
- Introduction (AC) - 2023Document15 pagesIntroduction (AC) - 2023양솔빈No ratings yet
- Ve215 Syllabus-Summer 2021Document4 pagesVe215 Syllabus-Summer 2021바나나우유No ratings yet
- Syllabus ELG3155 - 20181Document4 pagesSyllabus ELG3155 - 20181Mohamed HussainNo ratings yet
- ELEC3106 Electronics: Course StaffDocument10 pagesELEC3106 Electronics: Course StaffAlex HugoirNo ratings yet
- Ece 255 Electronic Circuit Analysis and Design Fall 2017: Division 2: Chew TR 1:30PM - 2:45PM ECE 170Document3 pagesEce 255 Electronic Circuit Analysis and Design Fall 2017: Division 2: Chew TR 1:30PM - 2:45PM ECE 170Dildar Khan BhatiNo ratings yet
- 1-Syllabus Syl Ee207Document1 page1-Syllabus Syl Ee207Anwer Al SomailyNo ratings yet
- UT Dallas Syllabus For Ee1102.502 05f Taught by Nathan Dodge (Dodge)Document2 pagesUT Dallas Syllabus For Ee1102.502 05f Taught by Nathan Dodge (Dodge)UT Dallas Provost's Technology GroupNo ratings yet
- Process Control SyllabusDocument4 pagesProcess Control Syllabuslogan6167No ratings yet
- ELEC1111 Course OutlineDocument10 pagesELEC1111 Course Outlinebpa749No ratings yet
- NCSU MAE 435 Control Systems SyllabusDocument3 pagesNCSU MAE 435 Control Systems SyllabusJordan HnngnNo ratings yet
- Eecs166 267 Syllabus15Document3 pagesEecs166 267 Syllabus15Bhanu Pratap ReddyNo ratings yet
- Eet - 2325C - 15648 - Carstensen - F15Document6 pagesEet - 2325C - 15648 - Carstensen - F15Michael MartinezNo ratings yet
- UT Dallas Syllabus For Ee1102.104.09f Taught by Nathan Dodge (Dodge)Document6 pagesUT Dallas Syllabus For Ee1102.104.09f Taught by Nathan Dodge (Dodge)UT Dallas Provost's Technology GroupNo ratings yet
- UT Dallas Syllabus For Ce1102.101.09f Taught by Nathan Dodge (Dodge)Document6 pagesUT Dallas Syllabus For Ce1102.101.09f Taught by Nathan Dodge (Dodge)UT Dallas Provost's Technology GroupNo ratings yet
- Chemistry Lab and Chemistry SyllabusDocument15 pagesChemistry Lab and Chemistry SyllabusNoah HernandezNo ratings yet
- UT Dallas Syllabus For Te1102.501 06f Taught by Nathan Dodge (Dodge)Document6 pagesUT Dallas Syllabus For Te1102.501 06f Taught by Nathan Dodge (Dodge)UT Dallas Provost's Technology GroupNo ratings yet
- Control Systems II BEE-4ADocument2 pagesControl Systems II BEE-4Aashoaib3No ratings yet
- EEL 4657 Linear Control SystemsDocument7 pagesEEL 4657 Linear Control SystemsRosemond FabienNo ratings yet
- ECE 476 - Power System Analysis Fall 2011 TR 12:30-2 PM: and Design, Fifth Edition, Thomson, 2011Document1 pageECE 476 - Power System Analysis Fall 2011 TR 12:30-2 PM: and Design, Fifth Edition, Thomson, 2011ratheeshkumardNo ratings yet
- EE352: Linear Control Systems Syllabus: 1 Course DescriptionDocument2 pagesEE352: Linear Control Systems Syllabus: 1 Course DescriptionYassine DjillaliNo ratings yet
- UT Dallas Syllabus For Ee3101.121.06u Taught by Tanay Bhatt (tmb018000)Document1 pageUT Dallas Syllabus For Ee3101.121.06u Taught by Tanay Bhatt (tmb018000)UT Dallas Provost's Technology GroupNo ratings yet
- 152 Syllabus sp10 PDFDocument2 pages152 Syllabus sp10 PDFwakasensei99No ratings yet
- UT Dallas Syllabus For Ee3101.122.06u Taught by Tanay Bhatt (tmb018000)Document1 pageUT Dallas Syllabus For Ee3101.122.06u Taught by Tanay Bhatt (tmb018000)UT Dallas Provost's Technology GroupNo ratings yet
- Vishal Patel ENEE425 SP2012 SyllabusDocument2 pagesVishal Patel ENEE425 SP2012 SyllabusSoumyadip SenguptaNo ratings yet
- 107 SyllabusDocument2 pages107 Syllabusjoltmajor9218No ratings yet
- Analog EE UMN SyllabusDocument2 pagesAnalog EE UMN SyllabusAnant NaikNo ratings yet
- EECS 140 Probability Engineering CourseDocument13 pagesEECS 140 Probability Engineering CoursekynegativeNo ratings yet
- Bab 0 Introduction 1Document24 pagesBab 0 Introduction 1WatashiNoNo ratings yet
- EEE 4373 and EEL 5934 Radio Frequency Electronics Syllabus Fall 2017Document11 pagesEEE 4373 and EEL 5934 Radio Frequency Electronics Syllabus Fall 2017Rosemond FabienNo ratings yet
- MATH166 SyllabusDocument2 pagesMATH166 Syllabusosmallso1313No ratings yet
- EEC 160 Signal Analysis and Communications Fall 2013Document2 pagesEEC 160 Signal Analysis and Communications Fall 2013eva1235xNo ratings yet
- First Course Handout - PHY315A - 2022-23Document2 pagesFirst Course Handout - PHY315A - 2022-23shashvat singhamNo ratings yet
- First: COLLEGE PHYSICS I - 15-PHYS-2001 (002-006) Fall Semester 2014Document2 pagesFirst: COLLEGE PHYSICS I - 15-PHYS-2001 (002-006) Fall Semester 2014hchris96No ratings yet
- Real-Time Systems: Scheduling, Analysis, and VerificationFrom EverandReal-Time Systems: Scheduling, Analysis, and VerificationNo ratings yet
- MarlinDocument28 pagesMarlincumpio425428No ratings yet
- Wa0001.Document1 pageWa0001.Esmael Vasco AndradeNo ratings yet
- Mushroom Umami Taste EvaluationDocument10 pagesMushroom Umami Taste EvaluationMaryam HanifNo ratings yet
- OK - EndUserGuideHoseSafetyInstituteDocument8 pagesOK - EndUserGuideHoseSafetyInstituteSunil GhosalkarNo ratings yet
- PHYS205 Matlab Lab TasksDocument4 pagesPHYS205 Matlab Lab TasksjacobNo ratings yet
- PPG Hi-Temp™ 1027 HDDocument5 pagesPPG Hi-Temp™ 1027 HDMarleo MorenoNo ratings yet
- Hospitality Case StudiesDocument26 pagesHospitality Case StudiesKarthik PalaniswamyNo ratings yet
- 11 Biology Notes Ch10 Cell Cycle and Cell DevisionDocument7 pages11 Biology Notes Ch10 Cell Cycle and Cell DevisionRohit ThakranNo ratings yet
- Cancer EssayDocument4 pagesCancer EssayCamille Joy BaliliNo ratings yet
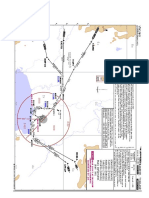
- VTBS 20-3DDocument1 pageVTBS 20-3Dwong keen faivNo ratings yet
- Nexus Capital Management Annual ReportDocument7 pagesNexus Capital Management Annual ReportDavid VasquezNo ratings yet
- Q's For CONS VivaDocument251 pagesQ's For CONS VivaHanin AbukhiaraNo ratings yet
- Unit 1 Unit 2 Unit 3 DIFFERENTIAL CALCULUS 1 2 3 PDFDocument124 pagesUnit 1 Unit 2 Unit 3 DIFFERENTIAL CALCULUS 1 2 3 PDFjayaram prakash kNo ratings yet
- D.K.Pandey: Lecture 1: Growth and Decay of Current in RL CircuitDocument5 pagesD.K.Pandey: Lecture 1: Growth and Decay of Current in RL CircuitBBA UniversityNo ratings yet
- MAD Magazine 001Document36 pagesMAD Magazine 001ClarkcoffeyNo ratings yet
- CHUYÊN ĐỀ 8 - VIẾT LẠI CÂU BẰNG TỪ NỐIDocument27 pagesCHUYÊN ĐỀ 8 - VIẾT LẠI CÂU BẰNG TỪ NỐICà ChuaNo ratings yet
- Physical Education Week 1 ActivitiesDocument4 pagesPhysical Education Week 1 ActivitiesTummys TummieNo ratings yet
- Fox em Corporate Presentation 08 2022Document19 pagesFox em Corporate Presentation 08 2022Pierluigi GhioneNo ratings yet
- Fe412farm Module N Cost BenefitDocument34 pagesFe412farm Module N Cost BenefitYaswanth NaikNo ratings yet
- Cast Steel y Strainer Ansi Class 150Document2 pagesCast Steel y Strainer Ansi Class 150aurinkokelloNo ratings yet
- Heidegger and RhetoricDocument202 pagesHeidegger and RhetoricMagda AliNo ratings yet
- Bitterness Compounds in Coffee Brew Measured by Analytical Instruments and Taste Sensing SystemDocument34 pagesBitterness Compounds in Coffee Brew Measured by Analytical Instruments and Taste Sensing SystemSolisNo ratings yet
- Calendário Yoruba Primordial PDFDocument18 pagesCalendário Yoruba Primordial PDFNicolas Alejandro Dias MaurellNo ratings yet
- SignaLink USB Product Guide - 02.2018Document22 pagesSignaLink USB Product Guide - 02.2018Rafael D. B. AnellaNo ratings yet
- Syngo MR E11 OncoDocument64 pagesSyngo MR E11 OncoLuís GuerraNo ratings yet
- Home Automation Chapter 1Document7 pagesHome Automation Chapter 1Nishant Sawant100% (1)
- Bitumen Water ProofingDocument23 pagesBitumen Water ProofingAkshthagowda848_1952No ratings yet
- Hazardous Waste Identification GuidanceDocument105 pagesHazardous Waste Identification GuidanceMiguel TorresNo ratings yet