You might also like
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Students' Ways of Experiencing Human-Centered DesignDocument33 pagesStudents' Ways of Experiencing Human-Centered DesignGururaj BandaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Multiple Choice QuestionsDocument39 pagesMultiple Choice QuestionsSunil Gadekar80% (20)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- FOC and DTCDocument69 pagesFOC and DTCRaed MohsenNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Ac Drives For EV ApplicationDocument5 pagesAc Drives For EV ApplicationGururaj BandaNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- (Signal Processing and Communications 13) Hu, Yu Hen - Programmable Digital Signal Processors - Architecture, Programming, and App PDFDocument386 pages(Signal Processing and Communications 13) Hu, Yu Hen - Programmable Digital Signal Processors - Architecture, Programming, and App PDFGururaj BandaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Comparision Between FOC and DTCDocument2 pagesComparision Between FOC and DTCGururaj BandaNo ratings yet
- Control Stratergies of AC DrivesDocument17 pagesControl Stratergies of AC DrivesGururaj BandaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Human-Centred DesignDocument7 pagesHuman-Centred DesignGururaj BandaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Human-Centred DesignDocument7 pagesHuman-Centred DesignGururaj BandaNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Vehicle DynamicsDocument6 pagesVehicle DynamicsGururaj BandaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Dimartino These 2005Document189 pagesDimartino These 2005hexxa3000No ratings yet
- Ac Motor ApplicationsDocument7 pagesAc Motor ApplicationsGururaj BandaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- 07443660Document5 pages07443660Xahid YousafNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- 109ee0273 PDFDocument46 pages109ee0273 PDFrijilpoothadiNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Mathematical Model of Induction MotorDocument7 pagesMathematical Model of Induction MotorGururaj BandaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Speed Control of PMBLDC MotorDocument21 pagesSpeed Control of PMBLDC MotorGururaj BandaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A New Single-Phase Single-Stage Three-LevelDocument12 pagesA New Single-Phase Single-Stage Three-LevelGururaj BandaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Model-Based Testing of Automotive Systems: Piketec GMBH, GermanyDocument9 pagesModel-Based Testing of Automotive Systems: Piketec GMBH, GermanyGururaj BandaNo ratings yet
- Design and Construction of Earth Fault Relay For Single Phase SystemDocument3 pagesDesign and Construction of Earth Fault Relay For Single Phase SystemGururaj BandaNo ratings yet
- 06 Control of BLDC Motor With The Help of Pulse Width ModulationDocument3 pages06 Control of BLDC Motor With The Help of Pulse Width ModulationGururaj BandaNo ratings yet
- Model-Based Design: Uhtxluhphqwv Prghov LpsohphqwdwlrqvDocument8 pagesModel-Based Design: Uhtxluhphqwv Prghov LpsohphqwdwlrqvGururaj BandaNo ratings yet
- A Single-Phase Dual-Output Ac-Dc Converter With High Quality InpuDocument143 pagesA Single-Phase Dual-Output Ac-Dc Converter With High Quality InpuGururaj BandaNo ratings yet
- Earth Fault RelayDocument12 pagesEarth Fault Relaysabill arasyidNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Free E Book General Knowledge For SSC Exam WWW - Sscportal.inDocument42 pagesFree E Book General Knowledge For SSC Exam WWW - Sscportal.inDrAditi Malhotra BhandariNo ratings yet
- Measurements NewDocument57 pagesMeasurements NewGururaj BandaNo ratings yet
- Power Quality ImprovementDocument7 pagesPower Quality ImprovementAshish ChoudharyNo ratings yet
- European PMSM Fuzzy DTC Improves Torque RippleDocument6 pagesEuropean PMSM Fuzzy DTC Improves Torque RippleGururaj BandaNo ratings yet
- A Study of Power Quality in Grid Interconnection With DFIGDocument4 pagesA Study of Power Quality in Grid Interconnection With DFIGGururaj BandaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Doping SemiconductorsDocument4 pagesDoping SemiconductorsPratheek UNo ratings yet
- Tda 8395Document10 pagesTda 8395qwertyuiNo ratings yet
- Manual DSLC WoodwardDocument114 pagesManual DSLC WoodwardedilbertoNo ratings yet
- Washer-Extractors: Cabinet Hardmount Design 2 and 3 Models Refer To Page 8 For Model IdentificationDocument77 pagesWasher-Extractors: Cabinet Hardmount Design 2 and 3 Models Refer To Page 8 For Model IdentificationkingdiamondNo ratings yet
- Electrical Engineering: Electric CircuitsDocument14 pagesElectrical Engineering: Electric CircuitsAmit Prakash SahooNo ratings yet
- Re Development of Shivaji Nagar Bus TerminalDocument23 pagesRe Development of Shivaji Nagar Bus TerminalrkinspiresNo ratings yet
- DiagramDocument23 pagesDiagramSabah100% (1)
- IB 13 01 70 12x65x12Document6 pagesIB 13 01 70 12x65x12TiagoPereiraNo ratings yet
- Dolphin 70e 75e Handheld Computers Accessory Catalog en PDFDocument8 pagesDolphin 70e 75e Handheld Computers Accessory Catalog en PDFYesica SantamariaNo ratings yet
- Load cells data sheet with low construction and high output signalDocument4 pagesLoad cells data sheet with low construction and high output signalAntony Stip Flores TorresNo ratings yet
- Stator Differential Protection During Transformer Inrush Conditions in The 489Document4 pagesStator Differential Protection During Transformer Inrush Conditions in The 489meraatNo ratings yet
- ERC - ResolutionNo.16, Seriesof2014Document28 pagesERC - ResolutionNo.16, Seriesof2014Fernando BayadNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 06b - Relaying Fundamentals ANSI DEVICE CODES - r2Document2 pages06b - Relaying Fundamentals ANSI DEVICE CODES - r2Pool Martinez AlejandroNo ratings yet
- CP650 Install Manual Issue6Document166 pagesCP650 Install Manual Issue6Sergio RodriguezNo ratings yet
- Power Systems Problem Set Version2Document10 pagesPower Systems Problem Set Version2Vineel Panakala100% (1)
- Delta Solar VFD DrivesDocument4 pagesDelta Solar VFD DriveskanaliNo ratings yet
- User Manual of STC-9200 Thermostat: 1. Package 2. SpecificationDocument2 pagesUser Manual of STC-9200 Thermostat: 1. Package 2. SpecificationKhalil SafiNo ratings yet
- Generador de Tonos 300MB PDFDocument2 pagesGenerador de Tonos 300MB PDFLogan Marquez AguayoNo ratings yet
- Axial PErmanent MAgnetDocument6 pagesAxial PErmanent MAgnetSatyam Swarup100% (1)
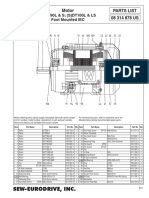
- Sew-Eurodrive, Inc.: MotorDocument1 pageSew-Eurodrive, Inc.: MotorcmaradiagaNo ratings yet
- Ieee Power Transmission and Distribution Standards Collection: Vuspec™Document3 pagesIeee Power Transmission and Distribution Standards Collection: Vuspec™Falcon EgyNo ratings yet
- LCD Module Specification Sheet for MTC-C162DPLY-2N DisplayDocument17 pagesLCD Module Specification Sheet for MTC-C162DPLY-2N Displayashwin_mcseNo ratings yet
- Stepping MotorsDocument7 pagesStepping MotorsTrần Thành ĐạtNo ratings yet
- Etel-61 CDocument2 pagesEtel-61 CClaudio CalabreseNo ratings yet
- MDRSelectionGuide PDFDocument8 pagesMDRSelectionGuide PDFDidi ConanNo ratings yet
- VSX-523-K AV Receiver Service ManualDocument99 pagesVSX-523-K AV Receiver Service ManualMar DocdorNo ratings yet
- A Simple BLDC Motor Drive For Solar PV PDFDocument24 pagesA Simple BLDC Motor Drive For Solar PV PDFRylde Bolivar100% (2)
- SC18CLX.2 LBP Compressor R404A/R507 220-240V 50Hz: GeneralDocument2 pagesSC18CLX.2 LBP Compressor R404A/R507 220-240V 50Hz: Generalأبو زينب المهندسNo ratings yet
- Power Quality Problems: An Overview & Key IssuesDocument46 pagesPower Quality Problems: An Overview & Key IssuesUdgam TiwariNo ratings yet
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)