You might also like
- Robotic ArmDocument15 pagesRobotic Armramjee26100% (2)
- Design and Control of A Robotic ArmDocument107 pagesDesign and Control of A Robotic ArmDave100% (8)
- EE2023-Robotics and Automation PDFDocument13 pagesEE2023-Robotics and Automation PDFveerapandianNo ratings yet
- Automatic Pneumatic Bumper System For Four WheelerDocument33 pagesAutomatic Pneumatic Bumper System For Four WheelerRaj EndranNo ratings yet
- Scotch Yoke Mechanis1Document17 pagesScotch Yoke Mechanis1Saravanan ViswakarmaNo ratings yet
- AssignmentqDocument12 pagesAssignmentqDirajen PMNo ratings yet
- EASA Module 05 Digital Techniques Mcq's by PDFDocument177 pagesEASA Module 05 Digital Techniques Mcq's by PDFHari HaranNo ratings yet
- Snake Robot ReportDocument30 pagesSnake Robot ReportAditya Vidolkar100% (1)
- Inverse Kinematic Analysis of Robot Manipulators PDFDocument336 pagesInverse Kinematic Analysis of Robot Manipulators PDFManuel Caeiro0% (1)
- Report On Stair Climbing TrolleyDocument13 pagesReport On Stair Climbing TrolleyTanvi100% (1)
- 6 DOF Robotic Arm Final Report Muhammad SherazDocument75 pages6 DOF Robotic Arm Final Report Muhammad SherazAsif Hussain100% (2)
- Scara Robot Report PDFDocument52 pagesScara Robot Report PDFMustafaMir100% (2)
- Hydraulic Jack Final ProjectDocument21 pagesHydraulic Jack Final ProjectArsalaan Waheed92% (12)
- 586-Automatic Transformer Heat Reduction SystemDocument4 pages586-Automatic Transformer Heat Reduction SystemAmit Mohapatra100% (1)
- Robot Project Report RoboticsDocument34 pagesRobot Project Report Roboticsdcrust_amit82% (11)
- Project Report On Pick and Place Robot (By Chirag Joshi)Document37 pagesProject Report On Pick and Place Robot (By Chirag Joshi)Chirag85% (41)
- Robotics Lab Manual FinalDocument39 pagesRobotics Lab Manual FinalSanthosh100% (4)
- Robotic ArmDocument25 pagesRobotic Armbhawak pokhrel100% (2)
- Project Report On Pick and Place RobotDocument20 pagesProject Report On Pick and Place RobotRanvijaySharma0% (2)
- Flying Robot Seminar ReportDocument28 pagesFlying Robot Seminar ReportMahaManthraNo ratings yet
- Hydraulic Arm ProjectDocument31 pagesHydraulic Arm ProjectGovind Rajput77% (22)
- Robotic ArmDocument28 pagesRobotic Armavinashs2410_41108610% (1)
- Servo Based 5 Axis Robotic Arm Project ReportDocument38 pagesServo Based 5 Axis Robotic Arm Project ReportRobo India100% (1)
- Microcontroller Based Robotic ArmDocument5 pagesMicrocontroller Based Robotic Armনূর হোসেন সৌরভ0% (1)
- Fabrication of An Aluminium Can Crusher MachineDocument33 pagesFabrication of An Aluminium Can Crusher MachineVincent MartinezNo ratings yet
- Pick and Place Robotic Arm Controlled by Computer - TJ211.42.M52 2007 - Mohamed Naufal B. OmarDocument26 pagesPick and Place Robotic Arm Controlled by Computer - TJ211.42.M52 2007 - Mohamed Naufal B. OmarSAMNo ratings yet
- Pick and Place Robot Report New Edited2Document19 pagesPick and Place Robot Report New Edited2Kshitij BandarNo ratings yet
- 4G LTE Integration TrainingDocument21 pages4G LTE Integration TrainingHichamHassaniNo ratings yet
- Pick and Place Arm Movement Control by AndroidDocument61 pagesPick and Place Arm Movement Control by Androidnagaraju75% (4)
- Universal Soft Pneumatic Robotic Gripper With Variable Effective LengthDocument6 pagesUniversal Soft Pneumatic Robotic Gripper With Variable Effective Lengthflv_91No ratings yet
- Automatic Head Lamp Alignment SystemDocument48 pagesAutomatic Head Lamp Alignment SystemAakash Dindigul100% (1)
- Project ReportDocument19 pagesProject ReportEr Nandkishor Prajapati86% (7)
- Final Year Project ReportDocument77 pagesFinal Year Project ReportUsama Waheed0% (1)
- Project Report On Robotic ArmDocument28 pagesProject Report On Robotic Armpatel ketan84% (25)
- Fabrication & Controling of A Manipulator With Specific Coloured Object DetectionDocument18 pagesFabrication & Controling of A Manipulator With Specific Coloured Object DetectionTusher Saha50% (8)
- Project ReportDocument7 pagesProject ReportAnkit SinghalNo ratings yet
- Robotics, Laboratory ManualDocument26 pagesRobotics, Laboratory ManualManu SharmaNo ratings yet
- Introduction and Objective Robotic ArmDocument2 pagesIntroduction and Objective Robotic ArmAbdul Zahier IsmailNo ratings yet
- Industrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeDocument73 pagesIndustrial Robotics: History and Definition Classification of Robot Robot Anatomy and Robot Motion Work VolumeSiddharth Gupta0% (1)
- Design and Fabrication of Quick Return Method Using Geneva MechanismDocument30 pagesDesign and Fabrication of Quick Return Method Using Geneva MechanismMohan PrasanthNo ratings yet
- Abstract For Robotic ArmDocument4 pagesAbstract For Robotic ArmRounak VyasNo ratings yet
- Chapter 1Document27 pagesChapter 1chalaNo ratings yet
- Dr. Ambedkar Institute of Technology: Under The Guidance ofDocument6 pagesDr. Ambedkar Institute of Technology: Under The Guidance ofSushanth KengunteNo ratings yet
- Ok DC Motor Speed Control Using Arduino and PotentiometerDocument39 pagesOk DC Motor Speed Control Using Arduino and PotentiometerRAHUL SINGH0% (1)
- Design and Fabrication of Motorized Screw Jack For Four WheelersDocument23 pagesDesign and Fabrication of Motorized Screw Jack For Four WheelersmujeebNo ratings yet
- PPWM ReportDocument25 pagesPPWM ReportRoman ShresthaNo ratings yet
- Final ReportDocument18 pagesFinal ReportYusha Patel100% (1)
- Classification of Robots Based On Control Methods.Document9 pagesClassification of Robots Based On Control Methods.Nani KumarNo ratings yet
- UNIT 4 MechatronicsDocument21 pagesUNIT 4 MechatronicsMuthuvel M100% (1)
- Box Shifting MechanismDocument21 pagesBox Shifting MechanismNishant Chauhan67% (9)
- Mechanical Projects TopicsDocument4 pagesMechanical Projects TopicsrohitNo ratings yet
- HYDRAULIC Bush Bearing Puller 2011 Ac FinalDocument47 pagesHYDRAULIC Bush Bearing Puller 2011 Ac FinalSelva Ganapathy50% (2)
- Building A Two Wheeled Balancing RobotDocument120 pagesBuilding A Two Wheeled Balancing RobotCp Em PheeradorNo ratings yet
- Obstacle Avoidance Robot Project Report FinalDocument39 pagesObstacle Avoidance Robot Project Report FinalAjil P Madhavan0% (1)
- Fabrication of Pneumatic Punching and Riveting MachineDocument45 pagesFabrication of Pneumatic Punching and Riveting MachineElakkiya Karthic100% (7)
- Robotic ArmDocument22 pagesRobotic Armpawansrivastava97100% (3)
- Automatic Drainage Cleaning System Project ReportDocument3 pagesAutomatic Drainage Cleaning System Project ReportGopal BunkarNo ratings yet
- LAB Report 7Document18 pagesLAB Report 7razakhan5114No ratings yet
- 112638Document36 pages112638NANTHINI PRIYA J 215111073No ratings yet
- An Improved Accurate Hydraulic Robotic Arms: JournalDocument14 pagesAn Improved Accurate Hydraulic Robotic Arms: JournalIJMERNo ratings yet
- Project Report On Ball Follower Robot PDFDocument14 pagesProject Report On Ball Follower Robot PDFAchyuth SamudralaNo ratings yet
- Android Based Remote Programmable SequentialDocument3 pagesAndroid Based Remote Programmable SequentialshankartambeNo ratings yet
- Cfdi 160 - Double Inlet BlowerDocument1 pageCfdi 160 - Double Inlet Blowerrsatelliteara_465614No ratings yet
- Key Words:: (S3a, B, C) With Two Bach Buckets: One Stage (B1), Two Orthogonal Stages (B2a, B), and ThreeDocument2 pagesKey Words:: (S3a, B, C) With Two Bach Buckets: One Stage (B1), Two Orthogonal Stages (B2a, B), and Threersatelliteara_465614No ratings yet
- Lesson 4Document6 pagesLesson 4rsatelliteara_465614No ratings yet
- BE Mechanical 2012 CourseDocument54 pagesBE Mechanical 2012 Coursersatelliteara_465614No ratings yet
- CCSP Course ContentDocument4 pagesCCSP Course Contentrsatelliteara_465614No ratings yet
- Sbi Asstt Scribe Declaration FormDocument2 pagesSbi Asstt Scribe Declaration Formrsatelliteara_465614No ratings yet
- Final Report: Experimental Study of Robotic Assembly and Force Control TasksDocument28 pagesFinal Report: Experimental Study of Robotic Assembly and Force Control Tasksrsatelliteara_465614No ratings yet
- Mobile Fi Lter Diagnosis Device: Mobile System For Temporary, Tribo-Electric In-Situ Filter Monitoring of Exhaust GasDocument2 pagesMobile Fi Lter Diagnosis Device: Mobile System For Temporary, Tribo-Electric In-Situ Filter Monitoring of Exhaust GasTùng Hồ ThanhNo ratings yet
- UNIT I - SCR Triggering and CommutationDocument14 pagesUNIT I - SCR Triggering and CommutationmalathynarayaniNo ratings yet
- LFP12100D With ApplicationsDocument1 pageLFP12100D With ApplicationsPower WhereverNo ratings yet
- GRC FM TutorialDocument15 pagesGRC FM TutorialBJI ALUMNINo ratings yet
- FLL BitxDocument7 pagesFLL BitxPj BaroesNo ratings yet
- Allprog II EnglishDocument12 pagesAllprog II Englishmohcin_111_124No ratings yet
- Ower Electronics: By: MSC Eng. Ismaeil AlnaabDocument109 pagesOwer Electronics: By: MSC Eng. Ismaeil Alnaabعبدالرحمن محمد جاسم حمودNo ratings yet
- Led TV: ServiceDocument106 pagesLed TV: ServiceSamuel Lopes100% (1)
- Katalog PLCDocument51 pagesKatalog PLCRyan SiahaanNo ratings yet
- Pravallika SeminarDocument20 pagesPravallika SeminarPravallika .DNo ratings yet
- en VEGASCAN 693 15 Channel HART Signal Conditioning InstrumentDocument52 pagesen VEGASCAN 693 15 Channel HART Signal Conditioning InstrumentIME Salvador Zurita HernandezNo ratings yet
- Allectra 6 CableDocument17 pagesAllectra 6 Cablemsyan1965No ratings yet
- Lab Manual 6Document9 pagesLab Manual 6mughalayeza87No ratings yet
- ALSTOM Relay CatalogueDocument8 pagesALSTOM Relay CatalogueHung Cuong PhamNo ratings yet
- KUKA LBR Iiwa Pack ENDocument3 pagesKUKA LBR Iiwa Pack ENZoki CvetkoskiNo ratings yet
- DR5000 Extended Manual ENGLISH v1.1.1 PDFDocument56 pagesDR5000 Extended Manual ENGLISH v1.1.1 PDFAnonymous N13JdnNo ratings yet
- JtoDocument2 pagesJtosunny112811No ratings yet
- 2N6346A SAC187 TriacDocument6 pages2N6346A SAC187 Triaclbv2060No ratings yet
- 3.2transmitters Guided Wave Radar 706xxxDocument58 pages3.2transmitters Guided Wave Radar 706xxxQuy le manhNo ratings yet
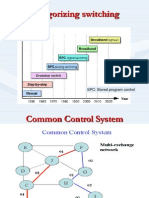
- Categorizing Switching: SPC: Stored Program ControlDocument42 pagesCategorizing Switching: SPC: Stored Program ControlRajurajiNo ratings yet
- JA Solar Module DatasheetDocument2 pagesJA Solar Module Datasheetahmed abdulkadir100% (1)
- HVFX7100Document75 pagesHVFX7100Luism120No ratings yet
- CPX260Document78 pagesCPX260agypsyNo ratings yet
- XGB-U +manual V1.0+XBC-DN32UUAUP XBC-DR28UUAUP PDFDocument1,322 pagesXGB-U +manual V1.0+XBC-DN32UUAUP XBC-DR28UUAUP PDFJaka SimonicNo ratings yet
- Xxpol 1710 2690Mhz×2 Dual-Beam 33° 20dbi 2° 12° Manual or by Optional Rcu (Remote Control Unit) Antenna Electrical SpecificationsDocument1 pageXxpol 1710 2690Mhz×2 Dual-Beam 33° 20dbi 2° 12° Manual or by Optional Rcu (Remote Control Unit) Antenna Electrical SpecificationsPavel PolishchukNo ratings yet
- Analog Communications Lab Mini-Project Class-D Audio Power Amplifier Using 555 TimerDocument4 pagesAnalog Communications Lab Mini-Project Class-D Audio Power Amplifier Using 555 TimerLily SharmaNo ratings yet
- BateriasDocument1 pageBateriasAlexanderNaranjoOsorioNo ratings yet
- Satellite Link Design PDFDocument7 pagesSatellite Link Design PDFNapolado DamanikNo ratings yet