You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Sadiku Practice Problem Solution PDFDocument177 pagesSadiku Practice Problem Solution PDFGustavo Tochetto100% (2)
- RosenstarkDocument13 pagesRosenstarkSimone MolinaroNo ratings yet
- Basic Electrical ENgineeringDocument59 pagesBasic Electrical ENgineeringvj4249No ratings yet
- Bias Power Supply For TV and Monitor TFT LCD Panels: FeaturesDocument30 pagesBias Power Supply For TV and Monitor TFT LCD Panels: Featureseduinggv1829No ratings yet
- Certcdavao: Instruction: Select The Correct Answer For Each of The FollowingDocument4 pagesCertcdavao: Instruction: Select The Correct Answer For Each of The FollowingJj JumawanNo ratings yet
- Electronics Catalog: Propulsion ControlsDocument24 pagesElectronics Catalog: Propulsion ControlsElliot CapsonNo ratings yet
- EE 230 - Analog Lab - 2021-22/I (Autumn) Experiment 4: Current Source, Current Mirror, and Differential PairDocument4 pagesEE 230 - Analog Lab - 2021-22/I (Autumn) Experiment 4: Current Source, Current Mirror, and Differential PairSruthiNo ratings yet
- HD MechDocument62 pagesHD MechSani UnanNo ratings yet
- AD588.pdf DatasheetDocument20 pagesAD588.pdf DatasheetPopescu ElenaNo ratings yet
- Circuit Theory 1 MidtermDocument101 pagesCircuit Theory 1 MidtermEL DamascoNo ratings yet
- Differential AmplifierDocument60 pagesDifferential AmplifierRKavyaNo ratings yet
- Excellent Online Test Series Ee (2017) : Technical Academy Pvt. LTDDocument23 pagesExcellent Online Test Series Ee (2017) : Technical Academy Pvt. LTDsayedNo ratings yet
- Norton's Theorem (1) 1Document19 pagesNorton's Theorem (1) 1Vedashree ShetyeNo ratings yet
- MC78T05Document13 pagesMC78T05Aditya SinghNo ratings yet
- PoEC 20 Circuit Theorems in AC Analysis PDFDocument32 pagesPoEC 20 Circuit Theorems in AC Analysis PDFroach100% (1)
- ZS6312 V1.0Document12 pagesZS6312 V1.0Franzua PlasenciaNo ratings yet
- KA431S/KA431SA/KA431SL: Programmable Shunt RegulatorDocument11 pagesKA431S/KA431SA/KA431SL: Programmable Shunt RegulatorPedro RodriguezNo ratings yet
- Circuit ElementsDocument81 pagesCircuit ElementsvidulaNo ratings yet
- An Improved Howland Current Source Drives Grounded LoadsDocument3 pagesAn Improved Howland Current Source Drives Grounded Loadsd_nikuNo ratings yet
- ESc201A HA1 02 - 08 19 PDFDocument2 pagesESc201A HA1 02 - 08 19 PDFraj sahuNo ratings yet
- DL 0165 RDocument20 pagesDL 0165 Rledu035No ratings yet
- Eee 1 Le1 UpdDocument2 pagesEee 1 Le1 UpdLester Jason T. ChengNo ratings yet
- 1 BJTDiffPairLabDocument11 pages1 BJTDiffPairLaburim11No ratings yet
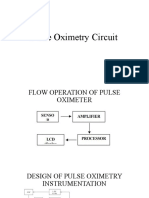
- Pulse Oximetry CircuitDocument19 pagesPulse Oximetry Circuitنواف الجهنيNo ratings yet
- Electric Circuit and Electronics NoteDocument34 pagesElectric Circuit and Electronics NoteEzekiel JamesNo ratings yet
- GM C FiltersDocument4 pagesGM C FiltersMichael GrahamNo ratings yet
- Viper 20Document22 pagesViper 20promatis5746No ratings yet
- Circuit Elements: An Element An Electric Circuit Circuit AnalysisDocument32 pagesCircuit Elements: An Element An Electric Circuit Circuit AnalysisppNo ratings yet
- Chapter One1Document29 pagesChapter One1مسلم محمودNo ratings yet
- Optically Coupled 20 Ma Current Loop Receiver: HCPL-4200Document13 pagesOptically Coupled 20 Ma Current Loop Receiver: HCPL-4200bigm94iNo ratings yet