You might also like
- Operators: Ofx GX D X X DX ODocument26 pagesOperators: Ofx GX D X X DX OMohamad Ilham ArgiansyahNo ratings yet
- Certamen 3 - Din Amica de Estructuras (CIV-235)Document4 pagesCertamen 3 - Din Amica de Estructuras (CIV-235)Carlos EsseNo ratings yet
- Fig. 1 Airfoil Model Mounted in Bending and Torsional SpringsDocument4 pagesFig. 1 Airfoil Model Mounted in Bending and Torsional SpringsPradip GuptaNo ratings yet
- Fig. 1 Airfoil Model Mounted in Bending and Torsional SpringsDocument4 pagesFig. 1 Airfoil Model Mounted in Bending and Torsional SpringsPradip GuptaNo ratings yet
- Calculus Practice IDocument8 pagesCalculus Practice IChia Pei XianNo ratings yet
- With Viscous Damping (Under Damped)Document6 pagesWith Viscous Damping (Under Damped)Pradip GuptaNo ratings yet
- Fourier Transform TablesDocument9 pagesFourier Transform TablesOrder17No ratings yet
- Pregunta 2Document8 pagesPregunta 2Gutierrez Juan EduardoNo ratings yet
- Assignment 8Document17 pagesAssignment 8Shawn DeolNo ratings yet
- Product Rule:: Uv Udv VduDocument35 pagesProduct Rule:: Uv Udv Vduمحمد شهريل محمد نورNo ratings yet
- Formulario: L Ogica Matem AticaDocument8 pagesFormulario: L Ogica Matem AticaDiana Carolina DelgadoNo ratings yet
- N Highest Value M M MDocument31 pagesN Highest Value M M MGOWTHAMNo ratings yet
- T Ax T By: Properties of Continous Time Fourier Series Fourier Transform Properties Properties of Laplace TransformDocument4 pagesT Ax T By: Properties of Continous Time Fourier Series Fourier Transform Properties Properties of Laplace TransformRavinder RangaNo ratings yet
- 5021 Solutions 10Document7 pages5021 Solutions 10belenhostNo ratings yet
- 4.3 2-D Discrete Cosine Transforms: N N K N N K N N X K K XDocument19 pages4.3 2-D Discrete Cosine Transforms: N N K N N K N N X K K Xnayeem4444No ratings yet
- SIGNALS and SYSTEMS PDFDocument106 pagesSIGNALS and SYSTEMS PDFShashank Tiwari100% (1)
- ECE633 Signals and Systems I, Fall 2009 - Homework 2 SolutionsDocument13 pagesECE633 Signals and Systems I, Fall 2009 - Homework 2 SolutionsGabrielPopoola13100% (2)
- Base ExcitationDocument24 pagesBase ExcitationBenjamin VazquezNo ratings yet
- D T D T STT I C T DT DT: Project 1Document4 pagesD T D T STT I C T DT DT: Project 1solarprismNo ratings yet
- Código Matlab Sobresalto Sistema Subamortiguado LibreDocument1 pageCódigo Matlab Sobresalto Sistema Subamortiguado LibreTolyKuperHuisaFernandezNo ratings yet
- EL-4701 Modelos de Sistemas: FormularioDocument9 pagesEL-4701 Modelos de Sistemas: FormularioEmmanuel AcostaNo ratings yet
- Regresie Multilineara y (x1, x2, x3, x4) FM ( (Va) T VX) A + bx1 + cx2 + dx3 + hx4Document6 pagesRegresie Multilineara y (x1, x2, x3, x4) FM ( (Va) T VX) A + bx1 + cx2 + dx3 + hx4matei5homeNo ratings yet
- 2 006 FA13 Eqn Sheet v1Document13 pages2 006 FA13 Eqn Sheet v1MH MerhiNo ratings yet
- Guía Sobre Integrales Indefinidas: Parte I: Verificar Las Siguientes IntegralesDocument9 pagesGuía Sobre Integrales Indefinidas: Parte I: Verificar Las Siguientes IntegralesFranco PalavecinosNo ratings yet
- Solution - Tutorial 3Document11 pagesSolution - Tutorial 3zgalionoooNo ratings yet
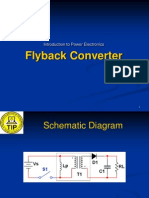
- Lesson 9 - Flyback ConverterDocument31 pagesLesson 9 - Flyback ConverterJhana Kimberly S. AquinoNo ratings yet
- EE 312 Lecture 3Document15 pagesEE 312 Lecture 3دكتور كونوهاNo ratings yet
- Example:: VT D It C VT R DT VT RDocument3 pagesExample:: VT D It C VT R DT VT Rلولو توتهNo ratings yet
- Elbow Center of GravityDocument2 pagesElbow Center of GravityMallela Sampath KumarNo ratings yet
- Fourier Finite TransformsDocument8 pagesFourier Finite Transformserev_20No ratings yet
- XL L L Yl L L: Cos Cos Cos Sin Sin SinDocument8 pagesXL L L Yl L L: Cos Cos Cos Sin Sin Sincucumber40% (1)
- ME2142 - Tut - 1 - With Answers PDFDocument3 pagesME2142 - Tut - 1 - With Answers PDFLin YushengNo ratings yet
- 12094-0130670227 ismSecMiscDocument12 pages12094-0130670227 ismSecMiscArmando GaviriaNo ratings yet
- PSD of Modulated SignalsDocument22 pagesPSD of Modulated SignalsnathanamarNo ratings yet
- Exam 1A AnswersDocument5 pagesExam 1A AnswersSasha Fatima MelaNo ratings yet
- Gear 2Document34 pagesGear 213sandipNo ratings yet
- Phonons I. Crystal Vibrations yDocument39 pagesPhonons I. Crystal Vibrations yArtur Dresel100% (1)
- Recursive Function AnalysisDocument76 pagesRecursive Function AnalysisJay NgNo ratings yet
- Compute Torque ControlDocument12 pagesCompute Torque ControlnhozcaibangNo ratings yet
- Table ComplexDocument5 pagesTable ComplexRavinder RangaNo ratings yet
- Signals and SystemsDocument42 pagesSignals and SystemsDeepa DhilipNo ratings yet
- Control Systems Formula SheetDocument12 pagesControl Systems Formula SheetliamhrNo ratings yet
- Class Test - 2016: Electrical EngineeringDocument9 pagesClass Test - 2016: Electrical EngineeringarunNo ratings yet
- Table of Z Transform and LaplaceDocument2 pagesTable of Z Transform and LaplaceDavidSiahaanNo ratings yet
- Fall 2014 Mechanical Systems Design Equation Sheet (Final Exam)Document17 pagesFall 2014 Mechanical Systems Design Equation Sheet (Final Exam)mattchekNo ratings yet
- 2014 VJC JC1 H2 MYE Solutions (Modified)Document11 pages2014 VJC JC1 H2 MYE Solutions (Modified)Yeehui LivelaughloveNo ratings yet
- ArchivetempreportDocument18 pagesArchivetempreportMuhammad ImranNo ratings yet
- Power SpectraDocument28 pagesPower SpectraAnonymous 6aGAvbNNo ratings yet
- ) Nsla) Z - A-La-N-N LNR) : Lengthis 4 EDocument14 pages) Nsla) Z - A-La-N-N LNR) : Lengthis 4 EAbhishek ChaurasiyaNo ratings yet
- Binomial Maths JEEDocument17 pagesBinomial Maths JEEPrakhar GuptaNo ratings yet
- Teacher 20081012 1758Document4 pagesTeacher 20081012 1758Lulu LiuNo ratings yet
- Section3 2Document19 pagesSection3 2sonti11No ratings yet
- Bda31103 Lect03 - 2 Dof Part2Document66 pagesBda31103 Lect03 - 2 Dof Part2Tarmizi KembaliNo ratings yet
- LECT02 - 2DOF Spring Mass Systems (Compatibility Mode)Document25 pagesLECT02 - 2DOF Spring Mass Systems (Compatibility Mode)zinilNo ratings yet
- INDefinite IntegrationDocument10 pagesINDefinite IntegrationShubham GoenkaNo ratings yet
- Linear Control Systems Lecture # 2 Examples of State ModelsDocument20 pagesLinear Control Systems Lecture # 2 Examples of State Modelsgurunathan14No ratings yet
- Quantum Mechanics II - Homework 4Document7 pagesQuantum Mechanics II - Homework 4Ale GomezNo ratings yet
- CH 06Document52 pagesCH 06Ali AhmedNo ratings yet
- EECE 301 Note Set 13 FS DetailsDocument21 pagesEECE 301 Note Set 13 FS DetailsrodriguesvascoNo ratings yet
- Ieee 802.11Document13 pagesIeee 802.11jeffy100% (1)
- DRV8353Document92 pagesDRV8353Lu HoaNo ratings yet
- Atellica IM Analyzers: Technical SpecificationsDocument4 pagesAtellica IM Analyzers: Technical SpecificationsNazarii KordupelNo ratings yet
- Enterprise Security Script: Splunk Security Solutions Marketing October 2019Document26 pagesEnterprise Security Script: Splunk Security Solutions Marketing October 2019RainyNo ratings yet
- SimulatorHW MidSize dSPACE Catalog 2008Document4 pagesSimulatorHW MidSize dSPACE Catalog 2008Ram Krishan SharmaNo ratings yet
- C Programming StringDocument5 pagesC Programming StringJohn Mark CarpioNo ratings yet
- Capacitors and Dielectrics: Major PointsDocument18 pagesCapacitors and Dielectrics: Major Points陳慶銘No ratings yet
- IptablesDocument3 pagesIptablessoomalikNo ratings yet
- JWJ 40 1 40Document17 pagesJWJ 40 1 40Menen SimmonNo ratings yet
- Length Standards EngDocument1 pageLength Standards EngAsif Hameed100% (2)
- BFC3042 BFC31802Document13 pagesBFC3042 BFC31802Zuliyah ZakariaNo ratings yet
- Additive Manufacturing 2Document24 pagesAdditive Manufacturing 2Classic PrintersNo ratings yet
- GCT 2015-16 - Final Exam - 2015-12-18 - SolutionDocument9 pagesGCT 2015-16 - Final Exam - 2015-12-18 - SolutionpadrefloNo ratings yet
- Chapter 8 RevaDocument20 pagesChapter 8 RevaanildhakeNo ratings yet
- Ritual To Use The Seals of SolomonDocument4 pagesRitual To Use The Seals of Solomonrarmandjr8474100% (11)
- Wegener Solves A PuzzleDocument8 pagesWegener Solves A PuzzleJonathan MacNaughtonNo ratings yet
- gp2 Speed IncreaserDocument2 pagesgp2 Speed Increasermayur22785No ratings yet
- Smart SYS S2301500R48 - DatesheetDocument2 pagesSmart SYS S2301500R48 - DatesheetWill F Alves0% (1)
- General Systems Theory A Mathematical ApproachDocument385 pagesGeneral Systems Theory A Mathematical Approachselotejp7100% (4)
- Chemistry 460 Problems: SET 1, Statistics and Experimental DesignDocument69 pagesChemistry 460 Problems: SET 1, Statistics and Experimental DesignDwie Sekar Tyas PrawestryNo ratings yet
- 253 968 2 SPDocument16 pages253 968 2 SPAlvin MRNo ratings yet
- NSSCO Chemistry SyllabusDocument52 pagesNSSCO Chemistry SyllabusEbic GamerNo ratings yet
- A Tale of Two Cultures: Contrasting Quantitative and Qualitative Research - Mahoney e GoertzDocument24 pagesA Tale of Two Cultures: Contrasting Quantitative and Qualitative Research - Mahoney e Goertzandre_eiras2057No ratings yet
- STA301 Quiz-2 File by Vu Topper RMDocument109 pagesSTA301 Quiz-2 File by Vu Topper RMTaimur ChaudhryNo ratings yet
- Source of HeatDocument9 pagesSource of HeatSreekumar RajendrababuNo ratings yet
- Laboratory Investigations On The Causes of Road Failures Constructed AlongDocument8 pagesLaboratory Investigations On The Causes of Road Failures Constructed AlongMulugeta DessieNo ratings yet
- Systemmeldungen GBDocument28 pagesSystemmeldungen GBAhmet0% (1)
- SolverTable HelpDocument13 pagesSolverTable HelpM Ibnu Aji DwiyantoNo ratings yet
- UM0384Document35 pagesUM0384Pat 14HS1No ratings yet
- The Yogi Code: Seven Universal Laws of Infinite SuccessFrom EverandThe Yogi Code: Seven Universal Laws of Infinite SuccessRating: 4.5 out of 5 stars4.5/5 (104)
- Boundless: Upgrade Your Brain, Optimize Your Body & Defy AgingFrom EverandBoundless: Upgrade Your Brain, Optimize Your Body & Defy AgingRating: 4.5 out of 5 stars4.5/5 (67)
- Peak: The New Science of Athletic Performance That is Revolutionizing SportsFrom EverandPeak: The New Science of Athletic Performance That is Revolutionizing SportsRating: 5 out of 5 stars5/5 (97)
- Chair Yoga: Sit, Stretch, and Strengthen Your Way to a Happier, Healthier YouFrom EverandChair Yoga: Sit, Stretch, and Strengthen Your Way to a Happier, Healthier YouRating: 3.5 out of 5 stars3.5/5 (5)
- Power of 10: The Once-A-Week Slow Motion Fitness RevolutionFrom EverandPower of 10: The Once-A-Week Slow Motion Fitness RevolutionRating: 3.5 out of 5 stars3.5/5 (11)
- Aging Backwards: Reverse the Aging Process and Look 10 Years Younger in 30 Minutes a DayFrom EverandAging Backwards: Reverse the Aging Process and Look 10 Years Younger in 30 Minutes a DayNo ratings yet
- Functional Training and Beyond: Building the Ultimate Superfunctional Body and MindFrom EverandFunctional Training and Beyond: Building the Ultimate Superfunctional Body and MindRating: 4.5 out of 5 stars4.5/5 (1)
- Strong Is the New Beautiful: Embrace Your Natural Beauty, Eat Clean, and Harness Your PowerFrom EverandStrong Is the New Beautiful: Embrace Your Natural Beauty, Eat Clean, and Harness Your PowerRating: 4 out of 5 stars4/5 (5)
- Relentless: From Good to Great to UnstoppableFrom EverandRelentless: From Good to Great to UnstoppableRating: 5 out of 5 stars5/5 (787)
- Muscle for Life: Get Lean, Strong, and Healthy at Any Age!From EverandMuscle for Life: Get Lean, Strong, and Healthy at Any Age!Rating: 4.5 out of 5 stars4.5/5 (22)
- 80/20 Running: Run Stronger and Race Faster by Training SlowerFrom Everand80/20 Running: Run Stronger and Race Faster by Training SlowerRating: 4.5 out of 5 stars4.5/5 (97)
- The Total Kettlebell Workout: Trade Secrets of a Personal TrainerFrom EverandThe Total Kettlebell Workout: Trade Secrets of a Personal TrainerRating: 5 out of 5 stars5/5 (1)
- Mind Your Body: 4 Weeks to a Leaner, Healthier LifeFrom EverandMind Your Body: 4 Weeks to a Leaner, Healthier LifeRating: 4.5 out of 5 stars4.5/5 (5)
- Pranayama: The Yoga Science of BreathingFrom EverandPranayama: The Yoga Science of BreathingRating: 4.5 out of 5 stars4.5/5 (8)
- Strength Training Over 40: The Only Weight Training Workout Book You Will Need to Maintain or Build Your Strength, Muscle Mass, Energy, Overall Fitness and Stay Healthy Without Living in the GymFrom EverandStrength Training Over 40: The Only Weight Training Workout Book You Will Need to Maintain or Build Your Strength, Muscle Mass, Energy, Overall Fitness and Stay Healthy Without Living in the GymRating: 4 out of 5 stars4/5 (6)
- Enter The Kettlebell!: Strength Secret of the Soviet SupermenFrom EverandEnter The Kettlebell!: Strength Secret of the Soviet SupermenRating: 4 out of 5 stars4/5 (29)
- Easy Strength: How to Get a Lot Stronger Than Your Competition-And Dominate in Your SportFrom EverandEasy Strength: How to Get a Lot Stronger Than Your Competition-And Dominate in Your SportRating: 4.5 out of 5 stars4.5/5 (17)
- Not a Diet Book: Take Control. Gain Confidence. Change Your Life.From EverandNot a Diet Book: Take Control. Gain Confidence. Change Your Life.Rating: 4.5 out of 5 stars4.5/5 (124)
- The Power of Fastercise: Using the New Science of Signaling Exercise to Get Surprisingly Fit in Just a Few Minutes a DayFrom EverandThe Power of Fastercise: Using the New Science of Signaling Exercise to Get Surprisingly Fit in Just a Few Minutes a DayRating: 4 out of 5 stars4/5 (4)
- The Yoga Sutras of Patanjali: The Final Guide for the Study and Practice of Patanjali's Yoga SutrasFrom EverandThe Yoga Sutras of Patanjali: The Final Guide for the Study and Practice of Patanjali's Yoga SutrasNo ratings yet
- Endure: Mind, Body, and the Curiously Elastic Limits of Human PerformanceFrom EverandEndure: Mind, Body, and the Curiously Elastic Limits of Human PerformanceRating: 4.5 out of 5 stars4.5/5 (237)
- Roxane Gay & Everand Originals: Built for This: The Quiet Strength of PowerliftingFrom EverandRoxane Gay & Everand Originals: Built for This: The Quiet Strength of PowerliftingRating: 4.5 out of 5 stars4.5/5 (133)
- 8 Weeks to 30 Consecutive Pull-Ups: Build Your Upper Body Working Your Upper Back, Shoulders, and Biceps | at Home Workouts | No Gym Required |From Everand8 Weeks to 30 Consecutive Pull-Ups: Build Your Upper Body Working Your Upper Back, Shoulders, and Biceps | at Home Workouts | No Gym Required |No ratings yet
- Tight Hip Twisted Core: The Key To Unresolved PainFrom EverandTight Hip Twisted Core: The Key To Unresolved PainRating: 4 out of 5 stars4/5 (9)
- Yamas & Niyamas: Exploring Yoga's Ethical PracticeFrom EverandYamas & Niyamas: Exploring Yoga's Ethical PracticeRating: 4.5 out of 5 stars4.5/5 (111)