You might also like
- The Machinery of Hay Harvesting - With Information on the Equipment and Methods Mowing, Raking and BailingFrom EverandThe Machinery of Hay Harvesting - With Information on the Equipment and Methods Mowing, Raking and BailingNo ratings yet
- Title: System and Apparatus For Climbing Up A Tree To Perform Various TasksDocument3 pagesTitle: System and Apparatus For Climbing Up A Tree To Perform Various TasksGirish HegdeNo ratings yet
- Can Robots Milk Cows?: Questions and Answers About Farm MachinesFrom EverandCan Robots Milk Cows?: Questions and Answers About Farm MachinesNo ratings yet
- Design and fabrication of a groundnut pod separating machineDocument4 pagesDesign and fabrication of a groundnut pod separating machineBhanu HiNo ratings yet
- 2002-Development of A Mechanism For Transplanting Rice Seedlings-ThomasDocument16 pages2002-Development of A Mechanism For Transplanting Rice Seedlings-ThomasHari Simha100% (2)
- The Machinery of Crop Planting - With Information on Seeding, Drilling, Transplanting and Other Mechanical Methods of Crop PlantingFrom EverandThe Machinery of Crop Planting - With Information on Seeding, Drilling, Transplanting and Other Mechanical Methods of Crop PlantingNo ratings yet
- Design Analysis of A Mechanical Rice TransplanterDocument7 pagesDesign Analysis of A Mechanical Rice TransplanterSaif KhanNo ratings yet
- New Type of Transverse Moving Box Mechanism For Pot Seedling Transplanting MachineDocument6 pagesNew Type of Transverse Moving Box Mechanism For Pot Seedling Transplanting MachinePhùng HùngNo ratings yet
- Murray Tullberg Basnet Part 3Document58 pagesMurray Tullberg Basnet Part 3Varsha rani PoddarNo ratings yet
- Scrap Collecting MachineDocument10 pagesScrap Collecting MachineShailesh RanawareNo ratings yet
- Literature Review on Automatic Seed FeederDocument4 pagesLiterature Review on Automatic Seed FeederMani KarthikeyanNo ratings yet
- Lecture 13 Sowing Equipment PDFDocument4 pagesLecture 13 Sowing Equipment PDFGladys Ruth PaypaNo ratings yet
- Lecture 13 Sowing Equipment PDFDocument4 pagesLecture 13 Sowing Equipment PDFsujan paudelNo ratings yet
- Lathe TurretDocument17 pagesLathe TurretLove ReloadedNo ratings yet
- Agri CH 5Document42 pagesAgri CH 5wardi tubeNo ratings yet
- Design of a Power Tiller Operated Vegetable TransplanterDocument11 pagesDesign of a Power Tiller Operated Vegetable TransplanterShambhu SinghNo ratings yet
- Tfe Module 5Document10 pagesTfe Module 5Anandhu ANo ratings yet
- Improve efficiency of semi-automatic box wrapping machinesDocument31 pagesImprove efficiency of semi-automatic box wrapping machinesVaibhav50% (2)
- Performance of Rice-Transplanters As Evaluated by National TestDocument4 pagesPerformance of Rice-Transplanters As Evaluated by National Testha2012ma2013No ratings yet
- Multiphase, A New Concept of WeavingDocument25 pagesMultiphase, A New Concept of Weavingishtiaque67% (3)
- Screw ConveyorDocument3 pagesScrew ConveyorWalter EsquivelNo ratings yet
- Harvester PatentDocument3 pagesHarvester PatentFisseha BirhaneNo ratings yet
- DocumentDocument1 pageDocumentSVPSNo ratings yet
- Belt Conveyor Design and ComponentsDocument27 pagesBelt Conveyor Design and ComponentsAnup ShuklaNo ratings yet
- Rice Transplanting Machine DesignDocument8 pagesRice Transplanting Machine DesignPeeyush MishraNo ratings yet
- Design, Operation and Calibration of a Standard Seed DrillDocument18 pagesDesign, Operation and Calibration of a Standard Seed Drillمان باجوہNo ratings yet
- 735 Flex Coil 1720 Air CartDocument9 pages735 Flex Coil 1720 Air CartTerry BuffaloNo ratings yet
- Development of Design and Investigation of Operation Processes of Small-Scale Root Crop and Potato HarvestersDocument10 pagesDevelopment of Design and Investigation of Operation Processes of Small-Scale Root Crop and Potato HarvestersKenn MendozaNo ratings yet
- Centrifuge PDFDocument11 pagesCentrifuge PDFسراء حيدر كاظمNo ratings yet
- Multipurpose Seed Sowing Machine: Raut Madhuri, Prof. P.S.Gorane, Pawar Ganesh, Patil Shubham, Patil NikhilDocument11 pagesMultipurpose Seed Sowing Machine: Raut Madhuri, Prof. P.S.Gorane, Pawar Ganesh, Patil Shubham, Patil NikhilMantha BalajiNo ratings yet
- Centrifuge: Al-Muthanaa University Collage of Engineering Chemical Engineering DepartmentDocument11 pagesCentrifuge: Al-Muthanaa University Collage of Engineering Chemical Engineering Departmentمحمود محمدNo ratings yet
- Efficient paddy transplanting machine for small farmersDocument20 pagesEfficient paddy transplanting machine for small farmersKishan Shah50% (2)
- Feeders and Storage SilosDocument20 pagesFeeders and Storage SilosMark Goldwyn Blando0% (2)
- Sky Cultivation Using Remote and Solar Power SourceDocument9 pagesSky Cultivation Using Remote and Solar Power SourceIJRASETPublicationsNo ratings yet
- Coal Handling Stacking and ReclaimingDocument3 pagesCoal Handling Stacking and ReclaimingPhilip Anthony MasilangNo ratings yet
- Weighing HBDocument317 pagesWeighing HBdipys41No ratings yet
- ConveyorsDocument4 pagesConveyorsKaenat AkhtiyarNo ratings yet
- Centrifuge: Introduction, Principle, Types, Handling Procedure, Uses and KeynotesDocument11 pagesCentrifuge: Introduction, Principle, Types, Handling Procedure, Uses and KeynotesAndres GomezNo ratings yet
- Patent Application Publication (10) Pub. No.: US 2007/0209417 A1Document7 pagesPatent Application Publication (10) Pub. No.: US 2007/0209417 A1Erin GokNo ratings yet
- Sowing and Planting EquipmentsDocument56 pagesSowing and Planting EquipmentsAjeet JoshiNo ratings yet
- Aaditya (TomDocument13 pagesAaditya (TomAaditya NaikNo ratings yet
- EP2870847A1Document26 pagesEP2870847A1mahdihoseinyy854No ratings yet
- How To Choose and Use Vibratory Feeders and ConveyorsDocument16 pagesHow To Choose and Use Vibratory Feeders and Conveyorssrusti02No ratings yet
- NASA Facts Launch Complex 39 Pads A and B 1999Document4 pagesNASA Facts Launch Complex 39 Pads A and B 1999Bob Andrepont100% (1)
- Sugarcane TechnologiesDocument10 pagesSugarcane TechnologiesYogesh KamatNo ratings yet
- Lecture 5 6 Seeding MachineryDocument23 pagesLecture 5 6 Seeding MachineryAfaaq ZahidNo ratings yet
- 2... (Advanced Manufacturing Technology) ..Our - Product - Design - of - A - Semi-Flexible - ScrewDocument14 pages2... (Advanced Manufacturing Technology) ..Our - Product - Design - of - A - Semi-Flexible - Screwsuneel shadyNo ratings yet
- Feeders and Storage SilosDocument18 pagesFeeders and Storage SilosGold Blando100% (1)
- NASA Facts Launch Complex 39, Pads A and B 2002Document8 pagesNASA Facts Launch Complex 39, Pads A and B 2002Bob Andrepont100% (1)
- Week 11 - Lecture 11 Seeding MachineryDocument23 pagesWeek 11 - Lecture 11 Seeding Machineryرانا ریحان انور خاںNo ratings yet
- Machinary Group 3Document16 pagesMachinary Group 3Temesgen SilabatNo ratings yet
- Ulllted States Patent (19) (11) Patent Number: 5,967,728: Gales Et Al. (45) Date of Patent: Oct. 19, 1999Document13 pagesUlllted States Patent (19) (11) Patent Number: 5,967,728: Gales Et Al. (45) Date of Patent: Oct. 19, 1999Prathamesh NaikNo ratings yet
- Seed DrillDocument21 pagesSeed Drillguranjan100% (1)
- Mechanised stacking and reclaiming systemsDocument31 pagesMechanised stacking and reclaiming systemsADITYA_PATHAK100% (2)
- July 9, 1968 T M. A. Cardoso 3,391,746: Helicopter Control System Filed May 15, 1967 3 Sheets-Sheet 1Document7 pagesJuly 9, 1968 T M. A. Cardoso 3,391,746: Helicopter Control System Filed May 15, 1967 3 Sheets-Sheet 1rte678No ratings yet
- Design Rice Transplanter Local Farmers North CotabatoDocument5 pagesDesign Rice Transplanter Local Farmers North CotabatoJosafat BaylosisNo ratings yet
- Underground WorkingDocument22 pagesUnderground WorkingRajnish RajNo ratings yet
- Centrifuge - Wikipedia, The Free EncyclopediaDocument11 pagesCentrifuge - Wikipedia, The Free EncyclopediaJosephNo ratings yet
- Fabrictaion of Mechanical Seed Thresher For FarmDocument42 pagesFabrictaion of Mechanical Seed Thresher For FarmElakkiya Karthic100% (2)
- Design and behaviour of jib cranesDocument20 pagesDesign and behaviour of jib cranesdicktracy1180% (5)
- Actual Suction Volume VS Discharge Pressure - Comp Selection Map PDFDocument5 pagesActual Suction Volume VS Discharge Pressure - Comp Selection Map PDFRachan EngchanilNo ratings yet
- Design and Fabrication of Engine Powered Two Rows Rice Transplanting MachineDocument69 pagesDesign and Fabrication of Engine Powered Two Rows Rice Transplanting MachineRachan EngchanilNo ratings yet
- Parts List SpreadsheetDocument4 pagesParts List SpreadsheetRachan EngchanilNo ratings yet
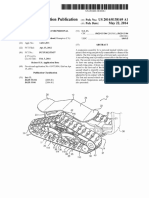
- Suspension Assembly for Personal Tracked VehiclesDocument20 pagesSuspension Assembly for Personal Tracked VehiclesRachan EngchanilNo ratings yet
- Design Narrative For On Line Posting of PlansDocument27 pagesDesign Narrative For On Line Posting of PlansRachan EngchanilNo ratings yet
- Hydraulic Systems 1665 GordDocument32 pagesHydraulic Systems 1665 GordsendilakNo ratings yet
- G1 DTV Service Manual - Draft 2013-8-23Document89 pagesG1 DTV Service Manual - Draft 2013-8-23Rachan EngchanilNo ratings yet
- BLN 9884Document24 pagesBLN 9884Rachan EngchanilNo ratings yet
- Submersible Motors: Application - Installation - MaintenanceDocument59 pagesSubmersible Motors: Application - Installation - MaintenanceRizky HardyNo ratings yet
- Fee Jee PMFM47Document7 pagesFee Jee PMFM47Jim100% (3)
- Fee Jee PMFM47Document7 pagesFee Jee PMFM47Jim100% (3)
- Gas Plant Reliability Trip Analysis Quick ToolDocument5 pagesGas Plant Reliability Trip Analysis Quick ToolRachan EngchanilNo ratings yet
- Ranhill Worley: Amerada Hess (Thailand) LimitedDocument18 pagesRanhill Worley: Amerada Hess (Thailand) LimitedRachan EngchanilNo ratings yet
- Layer of Protection 2011Document48 pagesLayer of Protection 2011Rachan EngchanilNo ratings yet
- Operability WhitePaper Ver2.0Document39 pagesOperability WhitePaper Ver2.0Rachan EngchanilNo ratings yet
- Handout3 3Document19 pagesHandout3 3Rachan EngchanilNo ratings yet
- White Paper On Liquid Hydrocarbon Drop Out in Natural Gas InfrastructureDocument30 pagesWhite Paper On Liquid Hydrocarbon Drop Out in Natural Gas InfrastructureHans MuellerNo ratings yet
- ValerusDocument63 pagesValerusRachan EngchanilNo ratings yet
- 5 Ron Cohen Thailand Compatibility ModeDocument44 pages5 Ron Cohen Thailand Compatibility ModeRachan EngchanilNo ratings yet
- Line Pack CalculationDocument7 pagesLine Pack CalculationRachan EngchanilNo ratings yet
- ABCDocument34 pagesABCRachan EngchanilNo ratings yet
- Anti-Surge Control ConceptsDocument6 pagesAnti-Surge Control ConceptsJose Gustavo Robles MoralesNo ratings yet
- BasicsDocument20 pagesBasicsRachan EngchanilNo ratings yet
- MP ProjDesignCheckDocument175 pagesMP ProjDesignCheckRachan Engchanil100% (1)
- 01 PetrobrasDocument13 pages01 PetrobrasRachan Engchanil100% (1)
- Industries Du Pétrole Et Du Gaz Naturel - Estimation Des Coûts Globaux de Production Et de TraitementDocument64 pagesIndustries Du Pétrole Et Du Gaz Naturel - Estimation Des Coûts Globaux de Production Et de TraitementGeert Henk WijnantsNo ratings yet
- 64.029 Surplus, Salvage and Scrap Material 64.029.1 General InformationDocument12 pages64.029 Surplus, Salvage and Scrap Material 64.029.1 General InformationRachan EngchanilNo ratings yet
- R b (both ρDocument9 pagesR b (both ρCyrus JiaNo ratings yet
- FORMAT UAS GANJIL 21-22 Bahasa Inggris (Dr. H. Masrupi, M.Pd.2021Document15 pagesFORMAT UAS GANJIL 21-22 Bahasa Inggris (Dr. H. Masrupi, M.Pd.2021IfdaNo ratings yet
- Measurement Systems Block DiagramDocument3 pagesMeasurement Systems Block Diagramchiranjib_kNo ratings yet
- Lab # 4 Determination of 10% Fine Value Test (TFV) : Objective Scope &significanceDocument3 pagesLab # 4 Determination of 10% Fine Value Test (TFV) : Objective Scope &significanceUSAMA KHALILNo ratings yet
- Automatic Buckling Checks on Stiffened Panels Based on Finite Element ResultsDocument163 pagesAutomatic Buckling Checks on Stiffened Panels Based on Finite Element Resultsmyusuf_engineerNo ratings yet
- Reading Comprehension Worksheet Albert EinsteinDocument3 pagesReading Comprehension Worksheet Albert EinsteinAnacel Faustino100% (3)
- Human Rights Lesson by SlidesgoDocument39 pagesHuman Rights Lesson by SlidesgoJaewonNo ratings yet
- Solved Problems - Design of Cam Clutches and BrakesDocument9 pagesSolved Problems - Design of Cam Clutches and BrakesSashankNiroulaNo ratings yet
- Mmpapmg 88Document32 pagesMmpapmg 88Pier Paolo LilliuNo ratings yet
- B253 PDFDocument8 pagesB253 PDFSky LeeNo ratings yet
- Towards An Ontology of Scientific Models: # Springer Science + Business Media B.V. 2008Document9 pagesTowards An Ontology of Scientific Models: # Springer Science + Business Media B.V. 2008Isaac RacinesNo ratings yet
- Chemistry: AN JournalDocument47 pagesChemistry: AN JournalbaridinoNo ratings yet
- OptiCem RT SystemDocument1 pageOptiCem RT SystemJean CarlosNo ratings yet
- Activity Guide Activity 5-Friction: (Adapted and Modified From "Friction Quantitative Lab" by Steve Banasiak)Document5 pagesActivity Guide Activity 5-Friction: (Adapted and Modified From "Friction Quantitative Lab" by Steve Banasiak)Ronel AlbanNo ratings yet
- Derivatives of Hyperbolic & Inverse Hyperbolic FunctionDocument6 pagesDerivatives of Hyperbolic & Inverse Hyperbolic FunctionLaurence Blaire IonNo ratings yet
- Unit-I Pn-Junction DiodeDocument48 pagesUnit-I Pn-Junction DiodeBabu GundlapallyNo ratings yet
- Upcoming Changes to Seismic Design Criteria 2000Document18 pagesUpcoming Changes to Seismic Design Criteria 2000algodamiNo ratings yet
- Trigonometry Formulas SummaryDocument4 pagesTrigonometry Formulas Summarysyahda100% (1)
- Solution To Problems in Quantum Field Theory: 1 Photons and The Electromagnetic FieldDocument34 pagesSolution To Problems in Quantum Field Theory: 1 Photons and The Electromagnetic FieldAlvaro Rafael Martínez100% (2)
- Vca VCN VCG - Usa - 01 12 PDFDocument16 pagesVca VCN VCG - Usa - 01 12 PDFProc. RembangNo ratings yet
- Introduction to the Physics of InformationDocument739 pagesIntroduction to the Physics of Informationkevinchu021195No ratings yet
- Schmid - Stability and Transition in Shear Flows PDFDocument561 pagesSchmid - Stability and Transition in Shear Flows PDFBrenda GutierrezNo ratings yet
- Scales: Engineering GraphicsDocument12 pagesScales: Engineering GraphicsNaman Dave100% (2)
- The Fantastic Four (2015) Fan RewriteDocument104 pagesThe Fantastic Four (2015) Fan RewriteRobert Garlen0% (1)
- Conwell1996 PDFDocument12 pagesConwell1996 PDFRamlialianNo ratings yet
- CPB 20104 Mass Transfer 2 UniKL MICET Experiment 2: Tray Dryer Full Lab ReportDocument9 pagesCPB 20104 Mass Transfer 2 UniKL MICET Experiment 2: Tray Dryer Full Lab ReportSiti Hajar MohamedNo ratings yet
- Small Signal Analysis of Power Systems With Wind and Energy Storage UnitsDocument8 pagesSmall Signal Analysis of Power Systems With Wind and Energy Storage UnitsB. Vikram AnandNo ratings yet
- 2022 3U - Sydney Boys - Trial Paper (With Solutions)Document38 pages2022 3U - Sydney Boys - Trial Paper (With Solutions)Rodney KNo ratings yet
- Intro and The Scientific Method - PowerpointDocument46 pagesIntro and The Scientific Method - Powerpointnam nguyenNo ratings yet