You might also like
- Philippine LiteratureDocument82 pagesPhilippine LiteratureLovelene Chrizze100% (5)
- Klu 8051Document165 pagesKlu 8051manvithbNo ratings yet
- BGK MPMC Unit-3 Q and ADocument21 pagesBGK MPMC Unit-3 Q and AMallesh ArjaNo ratings yet
- Block Diagram of 8051 MicrocontrollerDocument18 pagesBlock Diagram of 8051 Microcontrollermd Sadikul IslamNo ratings yet
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960From EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960No ratings yet
- Oracle Unified Method (OUM) White Paper - Oracle's Full Lifecycle Method For Deploying Oracle-Based Business Solutions - GeneralDocument17 pagesOracle Unified Method (OUM) White Paper - Oracle's Full Lifecycle Method For Deploying Oracle-Based Business Solutions - GeneralAndreea Mirosnicencu100% (1)
- Casestudy3 Hbo MaDocument2 pagesCasestudy3 Hbo Ma132345usdfghjNo ratings yet
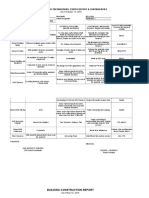
- Class Opening Preparations Status ReportDocument3 pagesClass Opening Preparations Status ReportMaria Theresa Buscato86% (7)
- 8051 Microcontroller Features and Pin ConfigurationDocument10 pages8051 Microcontroller Features and Pin ConfigurationelakNo ratings yet
- 8051 Architecture Contains The Following:: Block DiagramDocument17 pages8051 Architecture Contains The Following:: Block DiagramAtul GoyalNo ratings yet
- Embedded Systems - 8051 MicrocontrollerDocument33 pagesEmbedded Systems - 8051 MicrocontrollerAarti DhotreNo ratings yet
- MC Unit-2Document15 pagesMC Unit-2Yugandar Reddy NarraNo ratings yet
- 8051 Pin Diagram & It'S Each Function: 8051 Pin Diagram & It'S Each Function: 8051 Pin Diagram & It'S Each FunctionDocument22 pages8051 Pin Diagram & It'S Each Function: 8051 Pin Diagram & It'S Each Function: 8051 Pin Diagram & It'S Each FunctionShiuli BarmanNo ratings yet
- 8051 Microcontroller Architecture and Features in 40 CharactersDocument7 pages8051 Microcontroller Architecture and Features in 40 Characterssabin3sNo ratings yet
- MPMC-Unit-2 NOTESDocument43 pagesMPMC-Unit-2 NOTESBhure VedikaNo ratings yet
- Es JournalDocument25 pagesEs JournalSYIT62No ratings yet
- Microcontroller 1 J2 and 3 Module NotesDocument38 pagesMicrocontroller 1 J2 and 3 Module NotesArun RajNo ratings yet
- Unit - Iv Syllabus 8051 MicrocontrollerDocument52 pagesUnit - Iv Syllabus 8051 MicrocontrollerSakthivel Palani100% (1)
- MPMC - UNIT - 2 - All SlidesDocument117 pagesMPMC - UNIT - 2 - All Slidesneeraj ChowdaryNo ratings yet
- MPMC Unit 3Document168 pagesMPMC Unit 3Vijaya KumarNo ratings yet
- 8051 Microcontroller Architecture OverviewDocument28 pages8051 Microcontroller Architecture OverviewPranav SinhaNo ratings yet
- 8051 MicrocontrollerDocument32 pages8051 MicrocontrollerKet AshrithNo ratings yet
- 8051 Microcontroller Architecture GuideDocument72 pages8051 Microcontroller Architecture GuidetansnvarmaNo ratings yet
- 8051 Microcontroller Lab ManualDocument28 pages8051 Microcontroller Lab ManualAjay PatilNo ratings yet
- Microprocessor Lab Manual EE0310Document44 pagesMicroprocessor Lab Manual EE0310sathishkumar.vNo ratings yet
- Unit-Iv The 8051 Architecture Contents at A GlanceDocument28 pagesUnit-Iv The 8051 Architecture Contents at A GlanceKushwanth KaramsettiNo ratings yet
- 8051 Microcontroller.pdfDocument31 pages8051 Microcontroller.pdfHarshitha bottaNo ratings yet
- Embedded Systems/8051 MicrocontrollerDocument6 pagesEmbedded Systems/8051 MicrocontrollerDinesh DspNo ratings yet
- MPMC Unit 4Document40 pagesMPMC Unit 4Mavuru HemanthNo ratings yet
- 8051 Microcontroller: Chapter - 2Document58 pages8051 Microcontroller: Chapter - 2nebyuNo ratings yet
- TETE 3102/TEEE3106:: 8051 ArchitectureDocument21 pagesTETE 3102/TEEE3106:: 8051 ArchitectureOdoch HerbertNo ratings yet
- 2020- Mca Solved PaperDocument5 pages2020- Mca Solved Paperaniketkumarverma475No ratings yet
- Ece - Embedded Systems - DocumentDocument91 pagesEce - Embedded Systems - DocumentSRL MECHNo ratings yet
- 8051 Microcontroller Architecture and Memory OrganizationDocument21 pages8051 Microcontroller Architecture and Memory OrganizationHarsha MkrNo ratings yet
- 8051 Vs Motorola 68HC11Document19 pages8051 Vs Motorola 68HC11zuanne83No ratings yet
- 8051 MicrocontrollerDocument20 pages8051 MicrocontrollerVIVEK CHAUDHARYNo ratings yet
- 8051 Microcontroller Objectives: Understand The 8051 Architecture Use SFR in C Use I/O Ports in CDocument59 pages8051 Microcontroller Objectives: Understand The 8051 Architecture Use SFR in C Use I/O Ports in CJeevan Reddy MandaliNo ratings yet
- Introduction to the 8051 Microcontroller Architecture and its RegistersDocument8 pagesIntroduction to the 8051 Microcontroller Architecture and its RegistersPradeep LionelNo ratings yet
- Introduction To Project: Chapter-1Document31 pagesIntroduction To Project: Chapter-1amit6357100% (1)
- MPMC Unit4Document61 pagesMPMC Unit4Nandhini ShreeNo ratings yet
- 2.8051 Pin Diagram.1Document29 pages2.8051 Pin Diagram.1Yakkali KiranNo ratings yet
- Unit 3- 8051 Programming in c - CopyDocument22 pagesUnit 3- 8051 Programming in c - CopySenthil KumarNo ratings yet
- Microcontroller 8051Document42 pagesMicrocontroller 8051om18sahuNo ratings yet
- 8051 Microcontroller Objectives: Understand The 8051 Architecture Use SFR in C Use I/O Ports in CDocument60 pages8051 Microcontroller Objectives: Understand The 8051 Architecture Use SFR in C Use I/O Ports in CKhushwant TanwarNo ratings yet
- 8051 MicrocontrollerDocument60 pages8051 Microcontrollergokul docNo ratings yet
- 8051 Architecture: 8051 Architecture Consists of These FeaturesDocument30 pages8051 Architecture: 8051 Architecture Consists of These Featuresdlwdeadman_monster819100% (1)
- MicroprocessorDocument29 pagesMicroprocessorArnab RayNo ratings yet
- Et 3491 Unit-1 Part 1Document107 pagesEt 3491 Unit-1 Part 1anbarasudhandapani100% (1)
- 8051 Architecture OverviewDocument21 pages8051 Architecture Overviewkwoba fredrickNo ratings yet
- Architecture of the 8051 MicrocontrollerDocument41 pagesArchitecture of the 8051 MicrocontrollerAlex MathewNo ratings yet
- 03 8051 Architecture1Document35 pages03 8051 Architecture1harinkhedetNo ratings yet
- Microcontroller 8051 Instruction Set GuideDocument70 pagesMicrocontroller 8051 Instruction Set GuiderevanthNo ratings yet
- 4363741911Document26 pages4363741911Arnav Singh100% (1)
- Unit 4 ADocument50 pagesUnit 4 ASahil SinghNo ratings yet
- Seminar PresentationDocument24 pagesSeminar Presentationankyt807No ratings yet
- I-O PortsDocument20 pagesI-O PortsPradeep V DevNo ratings yet
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142From EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142No ratings yet
- Primer Tutorial On 8051Document21 pagesPrimer Tutorial On 8051ChanderKishoreJoshiNo ratings yet
- Primer Tutorial On 8051Document21 pagesPrimer Tutorial On 8051ChanderKishoreJoshiNo ratings yet
- Primer Tutorial On 8051Document8 pagesPrimer Tutorial On 8051ChanderKishoreJoshiNo ratings yet
- Primer Tutorial On 8051Document8 pagesPrimer Tutorial On 8051ChanderKishoreJoshiNo ratings yet
- New Toppers PDFDocument16 pagesNew Toppers PDFChanderKishoreJoshiNo ratings yet
- Photodiode Saturation and Noise Floor: Effects of Bias Voltage and Load ResistanceDocument12 pagesPhotodiode Saturation and Noise Floor: Effects of Bias Voltage and Load ResistanceChanderKishoreJoshiNo ratings yet
- Photodiode Saturation and Noise Floor: Effects of Bias Voltage and Load ResistanceDocument12 pagesPhotodiode Saturation and Noise Floor: Effects of Bias Voltage and Load ResistanceChanderKishoreJoshiNo ratings yet
- New Toppers PDFDocument16 pagesNew Toppers PDFChanderKishoreJoshiNo ratings yet
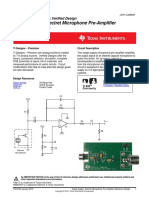
- Transimpedance Amplifier With Mic PDFDocument23 pagesTransimpedance Amplifier With Mic PDFChanderKishoreJoshiNo ratings yet
- IR Remote Reciever To Operate 8 Different Electrical AppliancesDocument94 pagesIR Remote Reciever To Operate 8 Different Electrical Appliancesckjoshi_kNo ratings yet
- IR Remote Reciever To Operate 8 Different Electrical AppliancesDocument94 pagesIR Remote Reciever To Operate 8 Different Electrical Appliancesckjoshi_kNo ratings yet
- Sam Report PDFDocument71 pagesSam Report PDFChanderKishoreJoshiNo ratings yet
- Reflection & Reflection of LightDocument48 pagesReflection & Reflection of LightChanderKishoreJoshiNo ratings yet
- Gentex Corp - Apply Electret Microphones To Voidce-Input DesignsDocument5 pagesGentex Corp - Apply Electret Microphones To Voidce-Input DesignsPk Alva FerNo ratings yet
- Multistoried Car Parking sys-RFIDDocument173 pagesMultistoried Car Parking sys-RFIDgoluektaNo ratings yet
- Hearing Aid AsicDocument15 pagesHearing Aid AsicChanderKishoreJoshiNo ratings yet
- Barcelona Smart City TourDocument44 pagesBarcelona Smart City TourPepe JeansNo ratings yet
- Telephone Triggered SwitchesDocument22 pagesTelephone Triggered SwitchesSuresh Shah100% (1)
- Decembermagazine 2009Document20 pagesDecembermagazine 2009maria_diyah4312No ratings yet
- Circuit AnalysisDocument98 pagesCircuit Analysisahtisham shahNo ratings yet
- Seismic Design of Steel Structures: Updates of Eurocode 8Document107 pagesSeismic Design of Steel Structures: Updates of Eurocode 8antonio111aNo ratings yet
- 03 - 42 STCP-Ahm AssetDocument46 pages03 - 42 STCP-Ahm AssetARP MEILNo ratings yet
- 4 TheEulerianFunctions - 000 PDFDocument16 pages4 TheEulerianFunctions - 000 PDFShorouk Al- IssaNo ratings yet
- SeparatorDocument2 pagesSeparatormmk111No ratings yet
- Smart EE June 2022 - PackageDocument19 pagesSmart EE June 2022 - PackageMercy FeNo ratings yet
- spl400 Stereo Power Amplifier ManualDocument4 pagesspl400 Stereo Power Amplifier ManualRichter SiegfriedNo ratings yet
- Presentation of Urban RegenerationsDocument23 pagesPresentation of Urban RegenerationsRafiuddin RoslanNo ratings yet
- Serendipity - A Sociological NoteDocument2 pagesSerendipity - A Sociological NoteAmlan BaruahNo ratings yet
- Time Table Semester II 2019-2020Document18 pagesTime Table Semester II 2019-2020Shiv Kumar MeenaNo ratings yet
- Manual Handling Risk Assessment ProcedureDocument6 pagesManual Handling Risk Assessment ProcedureSarfraz RandhawaNo ratings yet
- CHEMICAL ANALYSIS OF WATER SAMPLEDocument5 pagesCHEMICAL ANALYSIS OF WATER SAMPLEAiron Fuentes EresNo ratings yet
- Bhakti Trader Ram Pal JiDocument232 pagesBhakti Trader Ram Pal JiplancosterNo ratings yet
- Marulaberry Kicad EbookDocument23 pagesMarulaberry Kicad EbookPhan HaNo ratings yet
- Appliance Saver Prevents OverheatingDocument2 pagesAppliance Saver Prevents OverheatingphilipNo ratings yet
- Athenaze 1 Chapter 7a Jun 18th 2145Document3 pagesAthenaze 1 Chapter 7a Jun 18th 2145maverickpussNo ratings yet
- GastrectomyDocument19 pagesGastrectomyCyrus GarciaNo ratings yet
- Quick Reference - HVAC (Part-1) : DECEMBER 1, 2019Document18 pagesQuick Reference - HVAC (Part-1) : DECEMBER 1, 2019shrawan kumarNo ratings yet
- Emilio Aguinaldo CollegeDocument1 pageEmilio Aguinaldo CollegeRakeshKumar1987No ratings yet
- Clarinet Lecture Recital - Jude StefanikDocument35 pagesClarinet Lecture Recital - Jude Stefanikapi-584164068No ratings yet
- Lineapelle: Leather & Non-LeatherDocument16 pagesLineapelle: Leather & Non-LeatherShikha BhartiNo ratings yet
- U-KLEEN Moly Graph MsdsDocument2 pagesU-KLEEN Moly Graph MsdsShivanand MalachapureNo ratings yet
- Solutions: Spheres, Cones and CylindersDocument13 pagesSolutions: Spheres, Cones and CylindersKeri-ann MillarNo ratings yet