You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Functional Analysis: Gerald TeschlDocument44 pagesFunctional Analysis: Gerald TeschlMehwish QadirNo ratings yet
- BVPsDocument18 pagesBVPsGEORGE FRIDERIC HANDELNo ratings yet
- PDEDocument39 pagesPDEchandra kantNo ratings yet
- VI. Notes (Played) On The Vibrating StringDocument20 pagesVI. Notes (Played) On The Vibrating Stringjose2017No ratings yet
- Analysis of Fractional Differential Equations: Kai DiethelmDocument20 pagesAnalysis of Fractional Differential Equations: Kai DiethelmAbdella KarimeNo ratings yet
- hw6 SolnsDocument4 pageshw6 Solnsfree_progNo ratings yet
- Partial Differential Equations (Pdes)Document5 pagesPartial Differential Equations (Pdes)uploadingpersonNo ratings yet
- 18.S096: Homework Problem Set 1 (Revised) : Topics in Mathematics of Data Science (Fall 2015) Afonso S. BandeiraDocument6 pages18.S096: Homework Problem Set 1 (Revised) : Topics in Mathematics of Data Science (Fall 2015) Afonso S. BandeiraAbdelrhman ShoeebNo ratings yet
- J Camwa 2016 09 015Document9 pagesJ Camwa 2016 09 015Chương Quách VănNo ratings yet
- Chapter 1 Mathematical Modelling by Differential Equations: Du DXDocument7 pagesChapter 1 Mathematical Modelling by Differential Equations: Du DXKan SamuelNo ratings yet
- Analysis of solutions to fractional differential equationsDocument20 pagesAnalysis of solutions to fractional differential equationsKritik KumarNo ratings yet
- Streamline Calculations. Lecture Note 2: 1 Recapitulation From Previous LectureDocument12 pagesStreamline Calculations. Lecture Note 2: 1 Recapitulation From Previous LectureGaurav MishraNo ratings yet
- 1 - The Method of Characteristics - 10Document10 pages1 - The Method of Characteristics - 10John BirdNo ratings yet
- Diapositivas Larco AguirreDocument18 pagesDiapositivas Larco AguirreWilson LawrenteNo ratings yet
- 5.2 Accuracy and Stability For U C UDocument12 pages5.2 Accuracy and Stability For U C UEfstathios SiampisNo ratings yet
- Hirschler 2021Document31 pagesHirschler 2021reda rashwanNo ratings yet
- MAT 2165 Lecture 6Document8 pagesMAT 2165 Lecture 69cvxx9nqbfNo ratings yet
- 1.1 Motivation: X X 2 I J 2 X X X XDocument4 pages1.1 Motivation: X X 2 I J 2 X X X XpincoNo ratings yet
- Characteristics ChapterDocument30 pagesCharacteristics Chapternarainier88No ratings yet
- Partial Differential EquationsDocument11 pagesPartial Differential EquationsSaadFarooqNo ratings yet
- PdeDocument110 pagesPdeHammadNo ratings yet
- Evans' PDE Book ReviewDocument5 pagesEvans' PDE Book ReviewAnonymous cWCcgiNo ratings yet
- IB Mathematical Methods I Part 4 of 4 (Cambridge)Document26 pagesIB Mathematical Methods I Part 4 of 4 (Cambridge)ucaptd3No ratings yet
- Numerical Solution of Hamilton-Jacobi-Bellman Equations by An Exponentially Fitted Finite Volume MethodDocument7 pagesNumerical Solution of Hamilton-Jacobi-Bellman Equations by An Exponentially Fitted Finite Volume MethodSteve DemirelNo ratings yet
- Partial Differential EquationsDocument18 pagesPartial Differential EquationsTridip SardarNo ratings yet
- SadikuDocument4 pagesSadikuFelipe LucenaNo ratings yet
- Linear Differential EquationsDocument7 pagesLinear Differential Equationsseqsi boiNo ratings yet
- PARTIAL DIFFERENTIAL EQUATIONS I IntroduDocument25 pagesPARTIAL DIFFERENTIAL EQUATIONS I IntrodusimaNo ratings yet
- SF2521NPDE lecture2AKDocument66 pagesSF2521NPDE lecture2AKBlooD LOVERNo ratings yet
- Optimal Path Calculus of VariationsDocument38 pagesOptimal Path Calculus of VariationsChristoNo ratings yet
- 1B Methods Lecture Notes: Richard Jozsa, DAMTP Cambridge Rj310@cam - Ac.ukDocument26 pages1B Methods Lecture Notes: Richard Jozsa, DAMTP Cambridge Rj310@cam - Ac.ukKumardeep MukhopadhyayNo ratings yet
- Tutorial Sheet 1: MATH3121Document2 pagesTutorial Sheet 1: MATH3121Kevin ShenNo ratings yet
- The Wave Equation On RDocument12 pagesThe Wave Equation On RElohim Ortiz CaballeroNo ratings yet
- Solving Wave EquationDocument10 pagesSolving Wave Equationdanielpinheiro07No ratings yet
- Differentiation MITDocument134 pagesDifferentiation MITRahul AgrawalNo ratings yet
- Dasgupta 08 Intro To QFTDocument48 pagesDasgupta 08 Intro To QFTmrslaNo ratings yet
- Alberto Bressan and Yuxi Zheng - Conservative Solutions To A Nonlinear Variational Wave EquationDocument30 pagesAlberto Bressan and Yuxi Zheng - Conservative Solutions To A Nonlinear Variational Wave EquationPonmijNo ratings yet
- Helm (2008) : Section 32.4: Parabolic PdesDocument24 pagesHelm (2008) : Section 32.4: Parabolic Pdestarek mahmoudNo ratings yet
- 6 Difference Equations: 6.1 Comparison To ODE and GeneralitiesDocument13 pages6 Difference Equations: 6.1 Comparison To ODE and GeneralitiesYanira EspinozaNo ratings yet
- Pdes Iii (Hyperbolic Equations) : Phys 535Document53 pagesPdes Iii (Hyperbolic Equations) : Phys 535raul yondoNo ratings yet
- 3.6 Homogeneous Linear EquationsDocument3 pages3.6 Homogeneous Linear EquationsHassanImranNo ratings yet
- Chap 05Document19 pagesChap 05Mat MatttNo ratings yet
- First Order PDEDocument13 pagesFirst Order PDEkcqywNo ratings yet
- Student Lecture 51 and 52 Wave EqnDocument11 pagesStudent Lecture 51 and 52 Wave EqnuploadingpersonNo ratings yet
- Fluidsnotes PDFDocument81 pagesFluidsnotes PDFMohammad irfanNo ratings yet
- Journal of Differential Equations: Johanna D. García-Saldaña, Armengol GasullDocument14 pagesJournal of Differential Equations: Johanna D. García-Saldaña, Armengol GasullzonadosNo ratings yet
- Physics Final Exam GuideDocument8 pagesPhysics Final Exam Guideskw1990No ratings yet
- A Fully Discrete Difference Scheme For A Diffusion-Wave SystemDocument17 pagesA Fully Discrete Difference Scheme For A Diffusion-Wave SystemReza AbazariNo ratings yet
- Topics in Mathematical Physics - Victor PalamodovDocument80 pagesTopics in Mathematical Physics - Victor PalamodovMohammad Mofeez AlamNo ratings yet
- GEL 161: Introduction To Finite Difference Methods: Analytic Versus Numerical SolutionsDocument6 pagesGEL 161: Introduction To Finite Difference Methods: Analytic Versus Numerical SolutionstakervaderNo ratings yet
- Exercises 7Document2 pagesExercises 7Jeremy Mac LeanNo ratings yet
- Notes PDE Pt1Document23 pagesNotes PDE Pt1Wati KaNo ratings yet
- Lectures On Plasma Physics - Problems and SolutionsDocument39 pagesLectures On Plasma Physics - Problems and SolutionsAvanish K Singh50% (2)
- Articulo Periodic Oscillations of The Relativistic Pendulum With FrictionDocument2 pagesArticulo Periodic Oscillations of The Relativistic Pendulum With FrictionHumberto ValadezNo ratings yet
- ODES: Ordinary Differential EquationsDocument7 pagesODES: Ordinary Differential EquationsYogi Firman AndikaNo ratings yet
- Differential EvolutionDocument2 pagesDifferential EvolutionAnonymous JaW5WaN4rNo ratings yet
- Calculus of VariationsDocument36 pagesCalculus of VariationsAndreas NeophytouNo ratings yet
- Animation Without MacrosDocument2 pagesAnimation Without MacrosamyounisNo ratings yet
- Numerical Techniques For The Neutron Diffusion Equations in The Nuclear ReactorsDocument16 pagesNumerical Techniques For The Neutron Diffusion Equations in The Nuclear ReactorsamyounisNo ratings yet
- An Introduction To Nuclear Power and Resources 2009Document58 pagesAn Introduction To Nuclear Power and Resources 2009amyounisNo ratings yet
- Reactor Physics Experiment For Advanced Nuclear Reactor System at Kyoto University Critical Assembly (KUCA)Document8 pagesReactor Physics Experiment For Advanced Nuclear Reactor System at Kyoto University Critical Assembly (KUCA)amyounisNo ratings yet
- (L) (U) Decomposition of 3×3 Matrix: A A A A A A A A A G G G G G GDocument2 pages(L) (U) Decomposition of 3×3 Matrix: A A A A A A A A A G G G G G GamyounisNo ratings yet
- Matlab 2Document33 pagesMatlab 2amyounisNo ratings yet
- Simple Pendulum Spreadsheet SimulationDocument8 pagesSimple Pendulum Spreadsheet SimulationamyounisNo ratings yet
- Curve Fitting TechniquesDocument14 pagesCurve Fitting TechniquesAveenNo ratings yet
- 1 BVPsDocument99 pages1 BVPsamyounisNo ratings yet
- Determining Thorium and Uranium in Soil Using Passive DetectionDocument8 pagesDetermining Thorium and Uranium in Soil Using Passive DetectionamyounisNo ratings yet
- Matlab 1Document40 pagesMatlab 1amyounisNo ratings yet
- Molecular DynamicsDocument54 pagesMolecular DynamicscesaggNo ratings yet
- A4-Gui Tutorial PDFDocument36 pagesA4-Gui Tutorial PDFRahmi FebrianiNo ratings yet
- Shooting Method TutorialDocument3 pagesShooting Method Tutorialashwin802No ratings yet
- BVPDocument23 pagesBVPamyounisNo ratings yet
- Numerical MethodsDocument11 pagesNumerical MethodsamyounisNo ratings yet
- Dierentiation Between Tracks and Damages in SSNTD Under The Atomic Force MicroscopeDocument5 pagesDierentiation Between Tracks and Damages in SSNTD Under The Atomic Force MicroscopeamyounisNo ratings yet
- Homer Reid's Solutions to Merzbacher ProblemsDocument12 pagesHomer Reid's Solutions to Merzbacher ProblemsAnna ShabalinaNo ratings yet
- Calibration of A Solid State Nuclear Track Detector (SSNTD) With High Detection Threshold To Search For Rare Events in Cosmic RaysDocument5 pagesCalibration of A Solid State Nuclear Track Detector (SSNTD) With High Detection Threshold To Search For Rare Events in Cosmic RaysamyounisNo ratings yet
- SSNTD 5Document22 pagesSSNTD 5amyounisNo ratings yet
- Computational Physics Course OverviewDocument77 pagesComputational Physics Course OverviewamyounisNo ratings yet
- Production of Nuclear-Track Etched MembranesDocument5 pagesProduction of Nuclear-Track Etched MembranesamyounisNo ratings yet
- Solutions To Problems in Merzbacher, Quantum Mechanics, Third EditionDocument6 pagesSolutions To Problems in Merzbacher, Quantum Mechanics, Third Editionjose492432No ratings yet
- Matlab For Computational PhysicsDocument9 pagesMatlab For Computational PhysicsamyounisNo ratings yet
- Solutions To Problems in Merzbacher, Quantum Mechanics, Third EditionDocument12 pagesSolutions To Problems in Merzbacher, Quantum Mechanics, Third EditionHyunki Sim0% (1)
- Solving Ordinary Differential Equations - Sage Reference Manual v7Document13 pagesSolving Ordinary Differential Equations - Sage Reference Manual v7amyounisNo ratings yet
- Erleben 13 Siggraph Course NotesDocument42 pagesErleben 13 Siggraph Course NotesamyounisNo ratings yet
- Introduction To Energy Dispersive X-Ray Spectrometry (EDS) : 1.1 Principles of The TechniqueDocument11 pagesIntroduction To Energy Dispersive X-Ray Spectrometry (EDS) : 1.1 Principles of The TechniqueFitriani AhmadNo ratings yet
- Islam and DemocracyDocument175 pagesIslam and DemocracyamyounisNo ratings yet
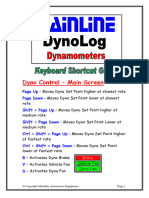
- Dyno ShortcutsDocument9 pagesDyno ShortcutsJordy CinqvalNo ratings yet
- CVA DVA Werkstuk Bekele - tcm39 91310Document40 pagesCVA DVA Werkstuk Bekele - tcm39 91310s_75No ratings yet
- Facial BoneDocument34 pagesFacial BoneIrfanHadiWijayaNo ratings yet
- IB PHYSICS 2.2 Forces Presentation All UnitDocument65 pagesIB PHYSICS 2.2 Forces Presentation All UnitJustCallMeLarryNo ratings yet
- Site Visit Form RF Antenna AdjustmentDocument8 pagesSite Visit Form RF Antenna AdjustmentazfahaidarNo ratings yet
- Mathematics Form2Document2 pagesMathematics Form2Intan Adriana85% (13)
- Astm D3776-07Document5 pagesAstm D3776-07matersci_ebay100% (1)
- Sinopec Ammonia Retrofit Paper PDFDocument4 pagesSinopec Ammonia Retrofit Paper PDFChakravarthy BharathNo ratings yet
- Molecular Cell Biology 7Th Edition Lodish Test Bank Full Chapter PDFDocument29 pagesMolecular Cell Biology 7Th Edition Lodish Test Bank Full Chapter PDFrorybridgetewe100% (11)
- Security JWT Oauth 2 Net CoreDocument14 pagesSecurity JWT Oauth 2 Net CoreREINALDO JOSE DURAN NAVARRO100% (1)
- Vector Group Testing at Site - MonographDocument13 pagesVector Group Testing at Site - Monographsamiron roy100% (1)
- Field Installation HandbookDocument88 pagesField Installation HandbookRamiro RamirezNo ratings yet
- Matlab Based Electromagnetics (Editable) - 2Document405 pagesMatlab Based Electromagnetics (Editable) - 2Muhammad Saqib BaigNo ratings yet
- 2017-2018 New CatalogueDocument218 pages2017-2018 New CataloguerobmndzNo ratings yet
- Underground Station in DubaiDocument20 pagesUnderground Station in DubaiVardhan100% (1)
- T&D UK Hazardous Area Electrical Equipment DistributorDocument8 pagesT&D UK Hazardous Area Electrical Equipment DistributorJayadevDamodaranNo ratings yet
- Drawworks and Rig Sizing PDFDocument8 pagesDrawworks and Rig Sizing PDFAmine Mimo100% (1)
- Final BFK40303 2018 2019 Sem 2Document6 pagesFinal BFK40303 2018 2019 Sem 2EJ KooNo ratings yet
- Management ScienceDocument3 pagesManagement ScienceRevenlie GalapinNo ratings yet
- Horary astrology chart interpretationDocument3 pagesHorary astrology chart interpretationSanjeev AgarwalNo ratings yet
- Calculation and Spesification of Fuel Oil System: Design Iv Machinery Department of Marine EngineeringDocument42 pagesCalculation and Spesification of Fuel Oil System: Design Iv Machinery Department of Marine EngineeringMuzami ThahirNo ratings yet
- Niels Bohr Proposed The Bohr Model of The Atom in 1915. ... The Bohr Model Is ADocument3 pagesNiels Bohr Proposed The Bohr Model of The Atom in 1915. ... The Bohr Model Is AKatherineNo ratings yet
- Design Codes and StandardsDocument22 pagesDesign Codes and StandardsFederico.IoriNo ratings yet
- AntennasDocument5 pagesAntennasMiguel Ferrando Rocher100% (1)
- BS en Iso 945 Part 3Document52 pagesBS en Iso 945 Part 3vkkt2016No ratings yet
- Yokogawa CVP - Old.Document11 pagesYokogawa CVP - Old.Karthikeya Rao KNo ratings yet
- Appendix 2 Split of Work Scope: Power Generation A Engine SystemDocument16 pagesAppendix 2 Split of Work Scope: Power Generation A Engine SystemmithuruetNo ratings yet
- Math8 q1 Mod6 Go Illustrating Rectangular Coordinate System 08092020Document20 pagesMath8 q1 Mod6 Go Illustrating Rectangular Coordinate System 08092020Cassandra Nicole FranciscoNo ratings yet
- 2022 10 12 Exam Pa Project StatementDocument25 pages2022 10 12 Exam Pa Project StatementGagan SawhneyNo ratings yet