You might also like
- SMC1Document6 pagesSMC1B ANIL KUMARNo ratings yet
- LST H4Document46 pagesLST H4B ANIL KUMARNo ratings yet
- Proposed Area of Research Maximum Power Point Tracking Under Partial Shading Conditions For Solar Photovoltaic SystemsDocument1 pageProposed Area of Research Maximum Power Point Tracking Under Partial Shading Conditions For Solar Photovoltaic SystemsB ANIL KUMARNo ratings yet
- Control Systems Mcq'sDocument33 pagesControl Systems Mcq'sB ANIL KUMARNo ratings yet
- Elect Ckt-Session PlanDocument5 pagesElect Ckt-Session PlanB ANIL KUMARNo ratings yet
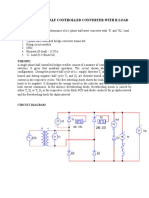
- Single Phase Half Controlled Converter With R LoadDocument3 pagesSingle Phase Half Controlled Converter With R LoadB ANIL KUMARNo ratings yet
- Gate Firing Circuits For SCR'S R-C Triggering CircuitDocument3 pagesGate Firing Circuits For SCR'S R-C Triggering CircuitB ANIL KUMARNo ratings yet
- Unit-2 Ac - DC ConvertersDocument10 pagesUnit-2 Ac - DC ConvertersB ANIL KUMARNo ratings yet
- Chapter 6Document4 pagesChapter 6Indu SusmiNo ratings yet
- Unit-3 Ac-Ac ConvertersDocument8 pagesUnit-3 Ac-Ac ConvertersB ANIL KUMARNo ratings yet
- What Is Power Electronics?: 1957 1900 Late 1980s Mid 1970sDocument12 pagesWhat Is Power Electronics?: 1957 1900 Late 1980s Mid 1970sB ANIL KUMARNo ratings yet
- 7.induction Motor EceDocument13 pages7.induction Motor EceB ANIL KUMARNo ratings yet
- Induction MotorDocument28 pagesInduction MotorB ANIL KUMARNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 1 - Canalis - Expert Guide 39Document1 page1 - Canalis - Expert Guide 39Hany ShaltootNo ratings yet
- R Series MV Vertibreak Disc PDFDocument4 pagesR Series MV Vertibreak Disc PDFBalan PalaniappanNo ratings yet
- Power System Basics: Tawsif Hossain Chowdhury Thchowdhury@seu - Edu.bdDocument21 pagesPower System Basics: Tawsif Hossain Chowdhury Thchowdhury@seu - Edu.bdMahmud HasanNo ratings yet
- Split Phase Motor PDFDocument15 pagesSplit Phase Motor PDFJack PranNo ratings yet
- Ejercicio en Clase PLC Basico (2020)Document6 pagesEjercicio en Clase PLC Basico (2020)jromoNo ratings yet
- Ntu Ee2002Document198 pagesNtu Ee2002Aaron Bourne Lee100% (1)
- OZ9939GNDocument12 pagesOZ9939GNEduardo SierraNo ratings yet
- Aluminum Electrolytic Capacitors: TS-NHDocument7 pagesAluminum Electrolytic Capacitors: TS-NHPanagiotis PanagosNo ratings yet
- Reviewer For RME-PEC ExamDocument61 pagesReviewer For RME-PEC ExamJeff CayetanoNo ratings yet
- 78-84 Standards Relevant To Transformers - Part IVDocument7 pages78-84 Standards Relevant To Transformers - Part IVDimitar MarkovNo ratings yet
- Auma Actuator Motor DataDocument2 pagesAuma Actuator Motor Datamuhammad_80100% (2)
- Removal - Installation of The Eps Battery Packs (Page) (Pdf-Export)Document5 pagesRemoval - Installation of The Eps Battery Packs (Page) (Pdf-Export)vikram ruhilNo ratings yet
- JKHGJDocument9 pagesJKHGJSrikanta NayakNo ratings yet
- Wolfspeed CPM3-1200-0016A Data Sheet ExternalDocument7 pagesWolfspeed CPM3-1200-0016A Data Sheet ExternalSonia ElouedNo ratings yet
- Eaton Panelboards Lighting Controls Product Guide Ca014005en CADocument119 pagesEaton Panelboards Lighting Controls Product Guide Ca014005en CAchristian de leonNo ratings yet
- N-CHANNEL 100V - 0.115 - 10A TO-220 Low Gate Charge Stripfet™ Ii Power MosfetDocument8 pagesN-CHANNEL 100V - 0.115 - 10A TO-220 Low Gate Charge Stripfet™ Ii Power Mosfetfabio_sg100% (1)
- Reference Manual: Date: 10/17/08Document31 pagesReference Manual: Date: 10/17/08Abhishek RanjanNo ratings yet
- Eeng 432 Microwave Theory and Design Lab: Marks Obtained Total MarksDocument5 pagesEeng 432 Microwave Theory and Design Lab: Marks Obtained Total MarksSohail KhiljiNo ratings yet
- InvDocument5 pagesInvKs Bharathiyar100% (1)
- CJJ34 DLDocument9 pagesCJJ34 DLapsNo ratings yet
- STV9325Document14 pagesSTV9325Alejandro Borrego DominguezNo ratings yet
- Silicon N Channel MOS FET Low Frequency Power Switching: FeaturesDocument8 pagesSilicon N Channel MOS FET Low Frequency Power Switching: FeaturesCarlosNo ratings yet
- Galil DMC 2143 Controller ManualDocument118 pagesGalil DMC 2143 Controller Manualkk_kamalakkannanNo ratings yet
- Cargador Lion 24 200 LS2621Document2 pagesCargador Lion 24 200 LS2621Gi Tano CórdobaNo ratings yet
- Driver L297 + L6203Document2 pagesDriver L297 + L6203TatiiieleeeNo ratings yet
- Detail Design For Substation: 1. DrawngsDocument11 pagesDetail Design For Substation: 1. Drawngssenthil kumar cNo ratings yet
- BCH Mini Limit SwitchDocument6 pagesBCH Mini Limit SwitchJayesh MewadaNo ratings yet
- SECTION 16500 Lighting SystemsDocument7 pagesSECTION 16500 Lighting Systemsd.singh2085No ratings yet
- 3b - Appendices - Street Lighting Devolution ManualDocument131 pages3b - Appendices - Street Lighting Devolution ManualCNo ratings yet
- A Report On Switchyard Equipment Testing (132Document11 pagesA Report On Switchyard Equipment Testing (132harsh_biharNo ratings yet