You might also like
- Thermodynamics - J. P. HolmanDocument68 pagesThermodynamics - J. P. Holmansivakkumar14No ratings yet
- As Practical Skills HandbookDocument62 pagesAs Practical Skills HandbookChiwe Thando MatutaNo ratings yet
- As Physics UncertaintiesDocument8 pagesAs Physics Uncertaintiesmeesam.razaNo ratings yet
- Cie Igcse Physics Chapter 4 2023 OnwDocument23 pagesCie Igcse Physics Chapter 4 2023 OnwZeinab ElkholyNo ratings yet
- Sources of Magnetic FieldDocument4 pagesSources of Magnetic Fieldmjzapant09No ratings yet
- C++ BasicsDocument15 pagesC++ BasicsAtro SuoicNo ratings yet
- General Physics 2 Quarter 3: Week 7 - Module 7: Magnetic Field VectorDocument15 pagesGeneral Physics 2 Quarter 3: Week 7 - Module 7: Magnetic Field VectorJun DandoNo ratings yet
- Cie Physics Key InformationsDocument25 pagesCie Physics Key InformationsengrroyNo ratings yet
- Chapter 6 Past PaperDocument19 pagesChapter 6 Past PaperWahid AzizyNo ratings yet
- Stability of ColloidDocument27 pagesStability of ColloidHendrawan SaputraNo ratings yet
- Magnetic Braking System Report - 2nd Year ProjectDocument11 pagesMagnetic Braking System Report - 2nd Year Projectfransisca rumendeNo ratings yet
- As Level PhysicsDocument5 pagesAs Level PhysicsSenna HaiderNo ratings yet
- Impacts of HVDC Lines On The Economics of HVDC ProjectsDocument149 pagesImpacts of HVDC Lines On The Economics of HVDC ProjectsArturo Isidro Conde Pérez0% (1)
- Grade 12 University Physics Course OutlineDocument1 pageGrade 12 University Physics Course OutlineAarish PanjwaniNo ratings yet
- Particle Mechanics Transport PhenomenaDocument6 pagesParticle Mechanics Transport PhenomenaC. MNo ratings yet
- 1.2 Systems and Models PDFDocument8 pages1.2 Systems and Models PDFSiddharth ReddyNo ratings yet
- Nyela Dorsey - Day1-Wksh1-OneAndTwoStepProblemsSTUDENTHWDocument2 pagesNyela Dorsey - Day1-Wksh1-OneAndTwoStepProblemsSTUDENTHWNyela Dorsey100% (1)
- Investment Appraisal Techniques-Topic Pack - Accounts and Finance - IntroductionDocument8 pagesInvestment Appraisal Techniques-Topic Pack - Accounts and Finance - IntroductionAcheampong AnthonyNo ratings yet
- Bonding Basics 2010Document9 pagesBonding Basics 2010AneilRandyRamdialNo ratings yet
- Plank's Constant LABDocument3 pagesPlank's Constant LABdheeraj ShahNo ratings yet
- Engineering: Kidzsearch Safe Wikipedia For KidsDocument4 pagesEngineering: Kidzsearch Safe Wikipedia For KidsAriel SpallettiNo ratings yet
- Law of Multiple ProportionDocument2 pagesLaw of Multiple Proportiontaipantai100% (1)
- As Level Physics Formula SheetDocument19 pagesAs Level Physics Formula SheetIsiaka AbibuNo ratings yet
- Measurement of Length - Screw Gauge (Physics) Question BankFrom EverandMeasurement of Length - Screw Gauge (Physics) Question BankNo ratings yet
- World History & Geography (1st Tri) - 2011 Study GuideDocument5 pagesWorld History & Geography (1st Tri) - 2011 Study GuideJosh KuruvillaNo ratings yet
- Chemistry Quiz One NotesDocument7 pagesChemistry Quiz One NotesCourseCentralNo ratings yet
- Workbook PhysicsDocument29 pagesWorkbook PhysicsKemuel De CastroNo ratings yet
- May/june 2009 Igcse Math Question Paper 2Document25 pagesMay/june 2009 Igcse Math Question Paper 2Mariam A.100% (3)
- Critical Reasoning Remaining TypesDocument8 pagesCritical Reasoning Remaining TypesNimish SinghNo ratings yet
- Physics - Numericals - APPLIED PHYSICS - ENGINEERING 1st YearDocument16 pagesPhysics - Numericals - APPLIED PHYSICS - ENGINEERING 1st YearManas Upadhyaya Telecommunication EngineeringNo ratings yet
- GCE Physics Topic Test 1Document40 pagesGCE Physics Topic Test 1刘奇No ratings yet
- Worksheet Chapter 1. Physical Quantities, Units and MeasurementDocument5 pagesWorksheet Chapter 1. Physical Quantities, Units and MeasurementMCH0% (1)
- Chemistry Amines NotesDocument7 pagesChemistry Amines NotesEbuka AgbanyimNo ratings yet
- IGCSE2009 Science (Double Award) SAMsDocument124 pagesIGCSE2009 Science (Double Award) SAMsSalvator LevisNo ratings yet
- Angular MotionDocument21 pagesAngular Motionsuperman618No ratings yet
- Series Parallel L Study GuideDocument2 pagesSeries Parallel L Study GuideCris JacksonNo ratings yet
- Test CircuitsDocument11 pagesTest CircuitsMADHAVI BARIYANo ratings yet
- AP Bio Lab 11 ReportDocument9 pagesAP Bio Lab 11 ReportCarey HortonNo ratings yet
- Vocabulary IltsDocument2 pagesVocabulary IltsMinhaj BdNo ratings yet
- IGCSE Chemistry DefinitionsDocument5 pagesIGCSE Chemistry DefinitionsTanmay Karur100% (1)
- Ugc Net Solved PapersDocument24 pagesUgc Net Solved PapersGudimetla MadhuNo ratings yet
- Phys 1Document10 pagesPhys 1MuhandiramalageNo ratings yet
- Ed Excel I Gcse Mathematics B Student BookDocument1 pageEd Excel I Gcse Mathematics B Student BookAsifur RahmanNo ratings yet
- Year 10 Electromagnetism Revision Notes 2016Document7 pagesYear 10 Electromagnetism Revision Notes 2016이다은No ratings yet
- Chemistry Unit 9Document196 pagesChemistry Unit 9yuki100% (1)
- Common Sentence ProblemsDocument3 pagesCommon Sentence Problemssharlene_17corsatNo ratings yet
- Chemical Ideas ContentsDocument4 pagesChemical Ideas ContentsJake RileyNo ratings yet
- Physics S6 PCBPCMDocument4 pagesPhysics S6 PCBPCMAKAYEZU Body santiveNo ratings yet
- KS3 Science 2008 Paper 2 Level 5-7Document28 pagesKS3 Science 2008 Paper 2 Level 5-7Saira HassanNo ratings yet
- 0620 s15 QP 31Document12 pages0620 s15 QP 31Enica RichardNo ratings yet
- Velocity, Distance & Acceleration 1 QPDocument11 pagesVelocity, Distance & Acceleration 1 QPsarkodie kwameNo ratings yet
- Magnetic Braking: FQ (VB)Document23 pagesMagnetic Braking: FQ (VB)Anshul AroraNo ratings yet
- CHP 14 TopicviseDocument9 pagesCHP 14 TopicviseSyed Mairaj Ul HaqNo ratings yet
- Write A Short NoteDocument11 pagesWrite A Short NoteTarapara BhautikNo ratings yet
- 11th WeekDocument6 pages11th WeekNanzkie Andrei SamanNo ratings yet
- Eddy Current: For The Comic-Book Series, See - For The Australian Rock Band, SeeDocument5 pagesEddy Current: For The Comic-Book Series, See - For The Australian Rock Band, SeeManoj PradhanNo ratings yet
- Chapter 29-Magnetic FieldsDocument43 pagesChapter 29-Magnetic FieldsGled HysiNo ratings yet
- Alaminos City National High School - Senior High School Department Learning Activity Sheet in General Physics 2 Week 2, Quarter 4, May 24-28, 2021Document6 pagesAlaminos City National High School - Senior High School Department Learning Activity Sheet in General Physics 2 Week 2, Quarter 4, May 24-28, 2021Arjay CarolinoNo ratings yet
- 01 Magnetism TheoryDocument13 pages01 Magnetism TheoryAnonymous Ob697T5oBlNo ratings yet
- Module1 - MagnetismDocument35 pagesModule1 - MagnetismJoicsha Nicole FerrerNo ratings yet
- Theories of MagnetismDocument6 pagesTheories of MagnetismAnonymous xZCFQbQ4No ratings yet
- Physics ProjectDocument16 pagesPhysics Projectdipanshu patidarNo ratings yet
- CH 27Document9 pagesCH 27siddharthsrathor04No ratings yet
- Magn Tis LíthosDocument10 pagesMagn Tis Líthosgritchard4No ratings yet
- Wind Driven Mobile Charging of Automobile BatteryDocument7 pagesWind Driven Mobile Charging of Automobile Batterysuraj dhulannavarNo ratings yet
- Visvesvaraya Technological University BelgaumDocument2 pagesVisvesvaraya Technological University Belgaumsuraj dhulannavarNo ratings yet
- 1:1 XXX A1: Toshavi PCDocument1 page1:1 XXX A1: Toshavi PCsuraj dhulannavarNo ratings yet
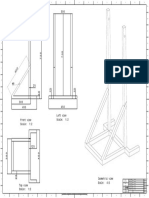
- FrameDocument1 pageFramesuraj dhulannavarNo ratings yet
- Left View Scale: 1:2: 1:1 XXX A0Document1 pageLeft View Scale: 1:2: 1:1 XXX A0suraj dhulannavarNo ratings yet
- D e S I G N o F A N A U T o M A T e D S o R T I N G o F o B J e C T R e J e C T I o N A N D C o U N T I N G M A C H I N eDocument13 pagesD e S I G N o F A N A U T o M A T e D S o R T I N G o F o B J e C T R e J e C T I o N A N D C o U N T I N G M A C H I N esuraj dhulannavarNo ratings yet
- M.H.Saboo Siddik PolytechnicDocument5 pagesM.H.Saboo Siddik Polytechnicsuraj dhulannavarNo ratings yet
- 1:1 XXX A1: Toshavi 5/3/2016Document1 page1:1 XXX A1: Toshavi 5/3/2016suraj dhulannavarNo ratings yet
- 1:1 XXX A4: Designed By: DateDocument1 page1:1 XXX A4: Designed By: Datesuraj dhulannavarNo ratings yet
- FrameDocument1 pageFramesuraj dhulannavarNo ratings yet
- WWW Mechengg Net 2015 09 Design and Fabrication of InjectionDocument17 pagesWWW Mechengg Net 2015 09 Design and Fabrication of Injectionsuraj dhulannavarNo ratings yet
- 1:1 XXX A1: Designed By: DateDocument1 page1:1 XXX A1: Designed By: Datesuraj dhulannavarNo ratings yet
- 1:1 XXX A4: Toshavi 4/8/2016Document1 page1:1 XXX A4: Toshavi 4/8/2016suraj dhulannavarNo ratings yet
- Techo GeneratorDocument18 pagesTecho GeneratorBhola KumarNo ratings yet
- Physics NotesDocument10 pagesPhysics NotesSiddharth RaikaNo ratings yet
- Grad R RDocument7 pagesGrad R RJoe DareNo ratings yet
- 4 Bar Mechanism PDFDocument3 pages4 Bar Mechanism PDFSagar Dutt MathurNo ratings yet
- Nuclear Reaction ReviewDocument3 pagesNuclear Reaction ReviewSeyi Martins ObandoNo ratings yet
- Department of Mechanical Engineering: Massachusetts Institute of Technology RibologyDocument3 pagesDepartment of Mechanical Engineering: Massachusetts Institute of Technology RibologyHamood Al-bahraniNo ratings yet
- BJT Ebers Moll ModelDocument5 pagesBJT Ebers Moll ModelShiraz HusainNo ratings yet
- Physics DPP PDFDocument12 pagesPhysics DPP PDFJaspreet kaur100% (1)
- Full Download Book Physics For Scientists and Engineers With Modern Physics PDFDocument41 pagesFull Download Book Physics For Scientists and Engineers With Modern Physics PDFbonnie.wheeler650100% (14)
- Solid MechanicsDocument2 pagesSolid MechanicsAjay PandeyNo ratings yet
- Compressible Flow ReviewDocument8 pagesCompressible Flow Reviewthehighlife1080No ratings yet
- Astm d1125Document7 pagesAstm d1125AGUS KURNIAWANNo ratings yet
- Monographie BIPM-5 Tables Vdffdfol5Document256 pagesMonographie BIPM-5 Tables Vdffdfol5arengifoipenNo ratings yet
- BeerVM11e PPT Ch11Document92 pagesBeerVM11e PPT Ch11brayanNo ratings yet
- Open Channel Hydraulics: CENG 3601Document21 pagesOpen Channel Hydraulics: CENG 3601Solomon MehariNo ratings yet
- Malik Badri - The Islamization of PsychologyDocument18 pagesMalik Badri - The Islamization of PsychologyShuaibaktharNo ratings yet
- Human Energy Field and AuraDocument2 pagesHuman Energy Field and AuraMirea ClaudiaNo ratings yet
- Vectors and Scalars - AnswersDocument8 pagesVectors and Scalars - Answersseeno beenoNo ratings yet
- JCR 2017Document524 pagesJCR 2017Mario CalderonNo ratings yet
- Chapter 20-1 - 已合并 PDFDocument116 pagesChapter 20-1 - 已合并 PDF林昀宣No ratings yet
- Limit State Definitions of The Connection Design Calculations SDS2 V7331Document110 pagesLimit State Definitions of The Connection Design Calculations SDS2 V7331fzhouNo ratings yet
- NMR UNit 1Document22 pagesNMR UNit 1magesh06No ratings yet
- B.tech 2-1 r15 MeDocument15 pagesB.tech 2-1 r15 MesadiksnmNo ratings yet
- Flinn Lab 1: Atomic Structure & Periodic Trends: Observe Part 1Document7 pagesFlinn Lab 1: Atomic Structure & Periodic Trends: Observe Part 1Angelo RayesNo ratings yet
- Sinusoidal Waveform or Sine Wave in An AC Circuit PDFDocument16 pagesSinusoidal Waveform or Sine Wave in An AC Circuit PDFDemudu DonkaNo ratings yet