You might also like
- Dy DX Dy DT DT DX /DT CSC CSCDocument2 pagesDy DX Dy DT DT DX /DT CSC CSCAlfredo KawengianNo ratings yet
- Dy DX Dy DT DT DX /DT CSC CSCDocument2 pagesDy DX Dy DT DT DX /DT CSC CSCAlfredo KawengianNo ratings yet
- NOTES - Conics, Parametric Equations, and Polar Coordinates (CHPT 10)Document6 pagesNOTES - Conics, Parametric Equations, and Polar Coordinates (CHPT 10)nyan kumamonNo ratings yet
- Problem 2.35 PDFDocument3 pagesProblem 2.35 PDFKauê BrittoNo ratings yet
- HW1 SolutionDocument3 pagesHW1 SolutionZim ShahNo ratings yet
- Quiz 4 SolutionsDocument8 pagesQuiz 4 Solutionsharsh gargNo ratings yet
- Problem Set 2 SolutionDocument10 pagesProblem Set 2 SolutionAbec One-offNo ratings yet
- Sheet 1Document2 pagesSheet 1ahmedmohamedn92No ratings yet
- Mathematical Modeling and Computation in FinanceDocument3 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- 2011 蔡淳仁 FinalDocument3 pages2011 蔡淳仁 Final陳浚維No ratings yet
- Deq11 Final SolDocument3 pagesDeq11 Final Sol陳浚維No ratings yet
- Fiesta 29 SolutionsDocument2 pagesFiesta 29 SolutionsteachopensourceNo ratings yet
- Kinematics DynamicsDocument104 pagesKinematics DynamicsNadiaa AdjoviNo ratings yet
- 2021 - w3 Math FoundationDocument24 pages2021 - w3 Math FoundationM. AnggaNo ratings yet
- MOMENTGENERATINGFUNCTIONDocument3 pagesMOMENTGENERATINGFUNCTIONMaheshNo ratings yet
- Signal & Systems-DONEDocument40 pagesSignal & Systems-DONEnavNo ratings yet
- Problem 2.28 PDFDocument2 pagesProblem 2.28 PDFKauê BrittoNo ratings yet
- MS PartialDocument3 pagesMS PartialAnaNo ratings yet
- Write Equations TutorialDocument2 pagesWrite Equations TutorialsooryaNo ratings yet
- Signals Sampling TheoremDocument3 pagesSignals Sampling TheoremKirubasri SNo ratings yet
- Method of Multiples ScaleDocument16 pagesMethod of Multiples ScaleJunaidvali ShaikNo ratings yet
- Exam2 SolutionsDocument5 pagesExam2 SolutionsabayteshomeNo ratings yet
- DSP4 Fourier Series - UnlockedDocument46 pagesDSP4 Fourier Series - UnlockedluisperikoNo ratings yet
- Assignment 2 ProblemsDocument2 pagesAssignment 2 ProblemsGeorge KNo ratings yet
- 2019 AMAM Exam PaperDocument3 pages2019 AMAM Exam PaperzeliawillscumbergNo ratings yet
- Section 13.2 Derivatives and Integrals of Vector FunctionsDocument3 pagesSection 13.2 Derivatives and Integrals of Vector FunctionsAlvin AdityaNo ratings yet
- Mid Term Solutions PDFDocument2 pagesMid Term Solutions PDFMd Nur-A-Adam DonyNo ratings yet
- W3 L1 Slides PDFDocument13 pagesW3 L1 Slides PDFYeison Fabian Fernández MarinNo ratings yet
- Revision Notes On Laplace Transforms: 1. Finding Inverse Transforms Using Partial FractionsDocument2 pagesRevision Notes On Laplace Transforms: 1. Finding Inverse Transforms Using Partial FractionsdivNo ratings yet
- Signals Sampling TheoremDocument3 pagesSignals Sampling TheoremBhuvan Susheel MekaNo ratings yet
- Study Unit 2Document15 pagesStudy Unit 2Gontse SempaNo ratings yet
- Laplace Transform ExamplesDocument5 pagesLaplace Transform ExamplesLeonard PhilipNo ratings yet
- Pertemuan 5 - PengPros 2022-2023Document27 pagesPertemuan 5 - PengPros 2022-2023Nabillah RahmadaniNo ratings yet
- HW - 2 Solutions (Draft)Document6 pagesHW - 2 Solutions (Draft)Hamid RasulNo ratings yet
- ECE1004 Laplace Transform GuideDocument7 pagesECE1004 Laplace Transform GuideHARJAP DANDIWALNo ratings yet
- Review ChapterDocument13 pagesReview ChaptermirosehNo ratings yet
- 20122013assignment - 6.pdf 2012/2013 (Assignment 6) : TU Delft - Offshore & Dredging Engineering - Structural DynamicsDocument6 pages20122013assignment - 6.pdf 2012/2013 (Assignment 6) : TU Delft - Offshore & Dredging Engineering - Structural DynamicsShashank BabuNo ratings yet
- Lecture 25: Line IntegralsDocument5 pagesLecture 25: Line Integralssmartwb.bihNo ratings yet
- Lecture 14 LT Adv FormulaDocument4 pagesLecture 14 LT Adv Formuladev.user.1792No ratings yet
- Ordinary and Partial Differential Equations and Applications Linear SystemsDocument13 pagesOrdinary and Partial Differential Equations and Applications Linear SystemsBarrack YomamaNo ratings yet
- Tabla de Integrales OOODocument2 pagesTabla de Integrales OOOOmeyra Nicoll IturriNo ratings yet
- EE16B HW 3 SolutionsDocument12 pagesEE16B HW 3 SolutionsSummer YangNo ratings yet
- The parabola is a curve in R parameterized as follows: C= ~ γ (x) := x x 0 x ∈ (−1, 2) Document4 pagesThe parabola is a curve in R parameterized as follows: C= ~ γ (x) := x x 0 x ∈ (−1, 2) Forsen ShungiteNo ratings yet
- Vec 3Document37 pagesVec 3SaquibNo ratings yet
- Exercises in Calculus 2Document2 pagesExercises in Calculus 2ნიკა ქურდაძეNo ratings yet
- f21 241 Final SolutionDocument2 pagesf21 241 Final Solutionbarre PenroseNo ratings yet
- Communication 1Document87 pagesCommunication 1Trường NguyễnNo ratings yet
- Chapter 9 - The Power of Calculus PDFDocument24 pagesChapter 9 - The Power of Calculus PDFKaran ShahNo ratings yet
- Assignment 7Document7 pagesAssignment 7Midhun MNo ratings yet
- Sa e e e S e S e A T T: Differential Equations '12 - FinalDocument3 pagesSa e e e S e S e A T T: Differential Equations '12 - Final陳浚維No ratings yet
- 400ex3 3ansDocument7 pages400ex3 3ansrebka mesfinNo ratings yet
- 100 Calculus 2 Problems Explained with Video ExamplesDocument13 pages100 Calculus 2 Problems Explained with Video Examplesrobert daltonNo ratings yet
- MATH2352 Differential Equations and Applications Tutorial Notes 5Document4 pagesMATH2352 Differential Equations and Applications Tutorial Notes 5John ChanNo ratings yet
- Lecture 8Document16 pagesLecture 8Jitesh HemjiNo ratings yet
- Unity Power Factor Discussion Latest Version 199782 7Document3 pagesUnity Power Factor Discussion Latest Version 199782 7Smit ShahNo ratings yet
- Dr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielDocument4 pagesDr. Alexander Schaum Chair of Automatic Control, Christian-Albrechts-University KielkevweNo ratings yet
- DC Motor ControlDocument16 pagesDC Motor ControlAnonymous UXnFQSBhNo ratings yet
- Discrete and Hybrid Systems: 3.1: Laplace Transform of Ideal SamplerDocument25 pagesDiscrete and Hybrid Systems: 3.1: Laplace Transform of Ideal SamplerOmnia TaalabNo ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- Summed Area TablesDocument29 pagesSummed Area TablesDhillonvNo ratings yet
- Data For Tightening Torque: LubricantDocument5 pagesData For Tightening Torque: LubricantAtanasio PerezNo ratings yet
- HabilitationDocument186 pagesHabilitationAland MediaNo ratings yet
- Manual Del Usuario MCI-WIR-00787 (ENG)Document23 pagesManual Del Usuario MCI-WIR-00787 (ENG)Helio CoragemNo ratings yet
- Whats Map ProjectionDocument19 pagesWhats Map Projectionmahmoud abdelrahmanNo ratings yet
- GOS4 ch03 SolutionsDocument11 pagesGOS4 ch03 SolutionsPrathamesh DalviNo ratings yet
- Acceleration LabDocument6 pagesAcceleration LabBlesvill BaroroNo ratings yet
- Huawei OceanStor 9000 V100R001C10 Product DescriptionDocument90 pagesHuawei OceanStor 9000 V100R001C10 Product DescriptionPHODNo ratings yet
- Parts Catalog - HITECH.2020Document36 pagesParts Catalog - HITECH.2020Nataly007No ratings yet
- Electric and water requirements for concrete batch plantDocument8 pagesElectric and water requirements for concrete batch plantWael WaelNo ratings yet
- Diffusion Mass TransferDocument18 pagesDiffusion Mass TransferbhuniakanishkaNo ratings yet
- Metal-Catalyzed Epoxidations of Alkenes With Hydrogen PeroxideDocument18 pagesMetal-Catalyzed Epoxidations of Alkenes With Hydrogen PeroxidechidambaramrNo ratings yet
- Zapata MATHCADDocument22 pagesZapata MATHCADGonzalo Ale Olave A.No ratings yet
- A Novel IGBT Gate Driver To Eliminate The Dead-Time Effect: Bin Zhang, Alex Q. Huang, Bin ChenDocument5 pagesA Novel IGBT Gate Driver To Eliminate The Dead-Time Effect: Bin Zhang, Alex Q. Huang, Bin Chenmutharasu29No ratings yet
- 03 - Reactions Between CaO and SO2 in Carbonating and No Carbonating ConditionsDocument9 pages03 - Reactions Between CaO and SO2 in Carbonating and No Carbonating ConditionsNishantNo ratings yet
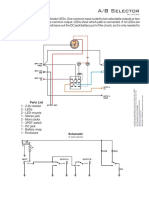
- A/B Selector: Parts ListDocument1 pageA/B Selector: Parts ListGiannis zmNo ratings yet
- Algebra 3 Principles and Sample Problems: 3.1 Probability 3.2 Statistics 3.3 Problems For SolutionsDocument24 pagesAlgebra 3 Principles and Sample Problems: 3.1 Probability 3.2 Statistics 3.3 Problems For SolutionsKrisha Jean MacalinoNo ratings yet
- CrankcaseDocument7 pagesCrankcaseCharlie BellNo ratings yet
- DPR TemplateDocument74 pagesDPR TemplateAnupamPanja0% (1)
- Laguna Kosmetik MC1 PlusDocument2 pagesLaguna Kosmetik MC1 PlusLaguna Karaoke TarakanNo ratings yet
- Geometric Cabinet Insets, Cards and ActivitiesDocument3 pagesGeometric Cabinet Insets, Cards and Activitiessonia sanchez espada100% (1)
- Fire Protection Systems Engineering GuideDocument18 pagesFire Protection Systems Engineering GuideAli MehrpourNo ratings yet
- Pokretljivost Jona U Vodenim RastvorimaDocument12 pagesPokretljivost Jona U Vodenim RastvorimaSilvester KolicNo ratings yet
- + 20db/decade High-Pass Filter (1Document26 pages+ 20db/decade High-Pass Filter (1Rashid ShababNo ratings yet
- Technical White Paper For ATM-ETH IWFDocument12 pagesTechnical White Paper For ATM-ETH IWFNeil_Liao_343No ratings yet
- Structural beam drawingsDocument1 pageStructural beam drawingsnathan kNo ratings yet
- SPE-18166-Correlaciones y RegistrosDocument14 pagesSPE-18166-Correlaciones y RegistrosSofiaNo ratings yet
- E06 - CONSTANTINACHE PompiliuDocument4 pagesE06 - CONSTANTINACHE PompiliuNgô Hải ĐăngNo ratings yet
- Modern Physics PDFDocument46 pagesModern Physics PDFMarcos ShepardNo ratings yet
- Python VocabulariesDocument101 pagesPython VocabulariesDennis Chen100% (1)