You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ASTM D-1895 測定装置Document2 pagesASTM D-1895 測定装置T AaaNo ratings yet
- Deformation According To Dead Load CaseDocument14 pagesDeformation According To Dead Load Casezikzak2011No ratings yet
- Compdyn 2011 PaperDocument19 pagesCompdyn 2011 Paperzikzak2011No ratings yet
- Foundation Profile & Soil ConditionsDocument1 pageFoundation Profile & Soil Conditionszikzak2011No ratings yet
- Design and Cost Comparison Between Frame & Shear Walls Structural Systems For Multi Story BuildingsDocument21 pagesDesign and Cost Comparison Between Frame & Shear Walls Structural Systems For Multi Story Buildingszikzak2011No ratings yet
- Design of Water Retaining Structures To ECDocument44 pagesDesign of Water Retaining Structures To ECVincent Teng100% (4)
- Design of Liquid Retaining Concrete Structures PDFDocument6 pagesDesign of Liquid Retaining Concrete Structures PDFzikzak2011No ratings yet
- Tanks Lecture 3Document70 pagesTanks Lecture 3zikzak2011No ratings yet
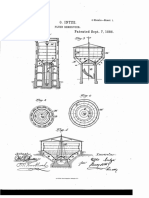
- Intze. Fluid Reservoir. 'NO. 348,912. Patented Sept. 7, 1886Document7 pagesIntze. Fluid Reservoir. 'NO. 348,912. Patented Sept. 7, 1886zikzak2011No ratings yet
- Ijems 14 (2) 2007 133-145Document13 pagesIjems 14 (2) 2007 133-145zikzak2011No ratings yet
- Design of Overhead Circular Water Tank With Flat Base: Presented ByDocument12 pagesDesign of Overhead Circular Water Tank With Flat Base: Presented Byzikzak2011No ratings yet
- January 2013: ArticleDocument7 pagesJanuary 2013: Articlezikzak2011No ratings yet
- Seismic Performance of Circular Elevated Water Tank: Rupachandra J. Aware, Dr. Vageesha S. MathadaDocument6 pagesSeismic Performance of Circular Elevated Water Tank: Rupachandra J. Aware, Dr. Vageesha S. Mathadazikzak2011No ratings yet
- List of Power Stations in India - Wikipedia, The Free EncyclopediaDocument19 pagesList of Power Stations in India - Wikipedia, The Free EncyclopediaRihlesh Parl0% (1)
- Electricity MCQ'SDocument131 pagesElectricity MCQ'SSalik SalikNo ratings yet
- Mark Scheme For June 2013: Additional FSMQDocument17 pagesMark Scheme For June 2013: Additional FSMQJoseph O'SullivanNo ratings yet
- Fire Safety Risk AssessmentDocument6 pagesFire Safety Risk AssessmentApep AriefNo ratings yet
- 595 Reading Comprehension Passage 25 MCQ Test With Answers Yoga and The Use of MantrasDocument3 pages595 Reading Comprehension Passage 25 MCQ Test With Answers Yoga and The Use of MantrasDalga ÖzalNo ratings yet
- Chemistry Food ReflectionDocument1 pageChemistry Food Reflectionapi-458139452No ratings yet
- Reflective EssayDocument4 pagesReflective Essayapi-296431001No ratings yet
- Gardner's Theory of Multiple IntelligencesDocument10 pagesGardner's Theory of Multiple IntelligencesHazel Leah Khae Arias100% (1)
- Capacitor PYQDocument8 pagesCapacitor PYQbinitamuzNo ratings yet
- Seismic Design of Buried PipeDocument105 pagesSeismic Design of Buried Pipetnvish100% (4)
- Becsr NotesDocument31 pagesBecsr NotesVikash kumarNo ratings yet
- Jump Start To Crushing and Milling in AspenPlus v8 - DownLoadLy - IrDocument14 pagesJump Start To Crushing and Milling in AspenPlus v8 - DownLoadLy - IrMarcoiNo ratings yet
- Chick NeurulationDocument14 pagesChick NeurulationSophia RubiaNo ratings yet
- Decongesting TrafficDocument65 pagesDecongesting Trafficchetan c patilNo ratings yet
- Outstandingacademicachievementawardtill 2021 Ver 0723Document15 pagesOutstandingacademicachievementawardtill 2021 Ver 0723A DNo ratings yet
- ## JSA - 008 - Hydraulic Rig and Mobile Crane MarchingDocument1 page## JSA - 008 - Hydraulic Rig and Mobile Crane MarchingAbhijit JanaNo ratings yet
- Hand Reaming and BroachingDocument25 pagesHand Reaming and Broachingpradeep_i19No ratings yet
- MUET EssayDocument3 pagesMUET EssayTSL3-0620 Shanice Chin Ying XuanNo ratings yet
- Customer ProfilingDocument41 pagesCustomer ProfilingLea Bianca Quinto100% (1)
- ADVERT 1 2022 LGSC Daily Mail Edited PMDocument15 pagesADVERT 1 2022 LGSC Daily Mail Edited PMDavid LyeluNo ratings yet
- AP-L&T-Home Exercise 1: Section 1 (Maths - 20 Questions)Document5 pagesAP-L&T-Home Exercise 1: Section 1 (Maths - 20 Questions)Manoj DhageNo ratings yet
- Se 7 529 2016Document20 pagesSe 7 529 2016YASMIM GALVAONo ratings yet
- Match The Opening Greeting With The Most Suitable CloseDocument4 pagesMatch The Opening Greeting With The Most Suitable Closealif afdilahNo ratings yet
- Copra MSDDocument1 pageCopra MSDStephanie AcuzarNo ratings yet
- Dorn 200410 1 R03 HD048609-01Document6 pagesDorn 200410 1 R03 HD048609-01ShermanNo ratings yet
- Project - 0x00. AirBnB Clone - The Console - ALX Africa IntranetDocument29 pagesProject - 0x00. AirBnB Clone - The Console - ALX Africa IntranetHector Vlad Itok100% (1)
- The Global Leader in Railway Wheels.: A World Apart in ReliabilityDocument4 pagesThe Global Leader in Railway Wheels.: A World Apart in ReliabilityMANOJNo ratings yet
- ISO 45001 2018 Gap Analysis Checklist Sample PDFDocument5 pagesISO 45001 2018 Gap Analysis Checklist Sample PDFMuhammad Iqbal NiyaziNo ratings yet
- Tic Tac Toe PolynomialsDocument2 pagesTic Tac Toe Polynomialsapi-570224043No ratings yet