You might also like
- Paper 3 Amna FPTA 2014Document15 pagesPaper 3 Amna FPTA 2014amnakalsoombuttNo ratings yet
- Nesting of Irregular Shapes Using Feature Matching and Parallel Genetic AlgorithmsDocument6 pagesNesting of Irregular Shapes Using Feature Matching and Parallel Genetic AlgorithmsMahmoud Reda ElSherifNo ratings yet
- Param Estim TikhonovDocument16 pagesParam Estim TikhonovYacer Hadadi RadwanNo ratings yet
- Bayesian Active Learning For Posterior EstimationDocument7 pagesBayesian Active Learning For Posterior EstimationAnanya AggarwalNo ratings yet
- Genetic and Other Global Optimization Algorithms - Comparison and Use in Calibration ProblemsDocument11 pagesGenetic and Other Global Optimization Algorithms - Comparison and Use in Calibration ProblemsOktafian PrabandaruNo ratings yet
- RePAMO PDFDocument19 pagesRePAMO PDFRonald JosephNo ratings yet
- Goel2007 Article EnsembleOfSurrogatesDocument18 pagesGoel2007 Article EnsembleOfSurrogatesELDHO JACOB JOYNo ratings yet
- Ant Colony Optimization For Continuous Domains: Krzysztof Socha, Marco DorigoDocument19 pagesAnt Colony Optimization For Continuous Domains: Krzysztof Socha, Marco DorigoJessica JaraNo ratings yet
- Divide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyDocument26 pagesDivide and Conquer Kernel Ridge Regression: University of California, Berkeley University of California, BerkeleyTiberiu TincaNo ratings yet
- Methods of Conjugate Gradients For Solving Linear SystemsDocument28 pagesMethods of Conjugate Gradients For Solving Linear SystemsMars_CrazyNo ratings yet
- Using The Theory of Functional Connections To Solve Boundary Value Geodesic ProblemsDocument22 pagesUsing The Theory of Functional Connections To Solve Boundary Value Geodesic ProblemsJanusz SiodaNo ratings yet
- 2008 Solving The One-Dimensional Bin Packing Problem With A WeightDocument9 pages2008 Solving The One-Dimensional Bin Packing Problem With A Weightaegr82No ratings yet
- Multivariate Convex Regression With Adaptive PartitioningDocument34 pagesMultivariate Convex Regression With Adaptive PartitioningRam K RijalNo ratings yet
- Bhattacharya - 1967 - Simple Method Resolution Distribution Into Gaussian ComponentsDocument22 pagesBhattacharya - 1967 - Simple Method Resolution Distribution Into Gaussian ComponentsDaniel Mateo Rangel ReséndezNo ratings yet
- The Computer Journal 1965 Box 42 52Document11 pagesThe Computer Journal 1965 Box 42 52Roberto Campos RuizNo ratings yet
- Constrained Mean-Variance Mapping Optimization For Truss Optimization ProblemsDocument17 pagesConstrained Mean-Variance Mapping Optimization For Truss Optimization ProblemsVenkatesh VarmaNo ratings yet
- An Improved Algorithm For Imbalanced Data and Small Sample Size ClassificationDocument7 pagesAn Improved Algorithm For Imbalanced Data and Small Sample Size ClassificationvikasbhowateNo ratings yet
- Mesh Grading in Isogeometric Analysis: Ulrich Langer, Angelos Mantzaflaris, Stephen Moore, Ioannis ToulopoulosDocument26 pagesMesh Grading in Isogeometric Analysis: Ulrich Langer, Angelos Mantzaflaris, Stephen Moore, Ioannis ToulopoulosJorge Luis Garcia ZuñigaNo ratings yet
- Facility Location Lit Review OldDocument10 pagesFacility Location Lit Review OldperestotnikNo ratings yet
- Breaking The Curse of Dimensionality With Convex Neural NetworksDocument53 pagesBreaking The Curse of Dimensionality With Convex Neural NetworksJonny BidonNo ratings yet
- Optimized Baby Step-Giant Step MethodsDocument32 pagesOptimized Baby Step-Giant Step MethodsGreg AnaluluNo ratings yet
- Robust Detection of Multiple Outliers in A Multivariate Data SetDocument30 pagesRobust Detection of Multiple Outliers in A Multivariate Data Setchukwu solomonNo ratings yet
- 1409 3669 PDFDocument36 pages1409 3669 PDFShashi BalaNo ratings yet
- Tips and Tricks For Training Gans With Physics ConstraintsDocument4 pagesTips and Tricks For Training Gans With Physics ConstraintsMicheal LayNo ratings yet
- Design Optimization by Using Particle Swarm Optimization in Matlab and Apdl in AnsysDocument10 pagesDesign Optimization by Using Particle Swarm Optimization in Matlab and Apdl in AnsysBakkiya RajNo ratings yet
- Robust Linear ClusteringDocument18 pagesRobust Linear Clusteringtani2779No ratings yet
- Computers and Mathematics With Applications: B. Khatri Ghimire, H.Y. Tian, A.R. LamichhaneDocument13 pagesComputers and Mathematics With Applications: B. Khatri Ghimire, H.Y. Tian, A.R. LamichhaneJerson RodriguezNo ratings yet
- Water Cycle Algorithm For Solving Multi-Objective Optimization ProblemsDocument17 pagesWater Cycle Algorithm For Solving Multi-Objective Optimization ProblemsCeline DenalyNo ratings yet
- Analysis of Cuckoo Search Efficiency: Carlos Eduardo M. Barbosa Germano C. VasconcelosDocument8 pagesAnalysis of Cuckoo Search Efficiency: Carlos Eduardo M. Barbosa Germano C. VasconcelosDavid StuartNo ratings yet
- Zayernouri 2016 ADocument14 pagesZayernouri 2016 ARed WarNo ratings yet
- 1 s2.0 S0377042713003373 MainDocument14 pages1 s2.0 S0377042713003373 Main37 TANNUNo ratings yet
- A Particle Swarm Optimization Algorithm For Mixed Variable Nonlinear ProblemsDocument14 pagesA Particle Swarm Optimization Algorithm For Mixed Variable Nonlinear ProblemsAhmed WestministerNo ratings yet
- EJOR3 FacilityLayoutDocument15 pagesEJOR3 FacilityLayoutReza MoghdaniNo ratings yet
- An Improved Quadratic Program For Unweight - 2013 - Journal of King Saud UniversDocument5 pagesAn Improved Quadratic Program For Unweight - 2013 - Journal of King Saud UniversManish KumarNo ratings yet
- A Modified Real Coded Genetic Algorithm For ConstrainedDocument26 pagesA Modified Real Coded Genetic Algorithm For ConstrainedgkgjNo ratings yet
- Chan Wan2000Document30 pagesChan Wan2000asdfghjklNo ratings yet
- Experimental Study of The Broyden Class Updating Method For Solving Non-Linear Unconstrained Optimization ProblemsDocument10 pagesExperimental Study of The Broyden Class Updating Method For Solving Non-Linear Unconstrained Optimization ProblemsSamuel AnikiNo ratings yet
- A Boltzmann Based Estimation of Distribution Algorithm: Information Sciences July 2013Document22 pagesA Boltzmann Based Estimation of Distribution Algorithm: Information Sciences July 2013f1095No ratings yet
- Swarm Intelligence For Mixed-Variable Design OptimizationDocument10 pagesSwarm Intelligence For Mixed-Variable Design OptimizationbonethomasNo ratings yet
- Blur Cvpr12Document20 pagesBlur Cvpr12Gary ChangNo ratings yet
- A New Method For Solving A System of Fifth-Order oDocument6 pagesA New Method For Solving A System of Fifth-Order oSayiqa Jabeen FAST NU LHRNo ratings yet
- A New Method For Solving A System of Fifth-Order oDocument6 pagesA New Method For Solving A System of Fifth-Order oSayiqa Jabeen FAST NU LHRNo ratings yet
- Generalized Pattern Search Methods For A Class of Nonsmooth Optimization Problems With Structure - Bogani (2008)Document11 pagesGeneralized Pattern Search Methods For A Class of Nonsmooth Optimization Problems With Structure - Bogani (2008)Emerson ButynNo ratings yet
- DankienDocument18 pagesDankiendoantranuyennhiNo ratings yet
- AAES32021322Document23 pagesAAES32021322Civil Engineering Ak ChannalNo ratings yet
- Studio Express A1 - DeutschDocument22 pagesStudio Express A1 - DeutschMr. K0% (1)
- (Recursive Sparse, Spatiotemporal Coding)Document6 pages(Recursive Sparse, Spatiotemporal Coding)vanhouten777No ratings yet
- Abstract Poster PDFDocument21 pagesAbstract Poster PDFMohan Kumar100% (1)
- Swarm and Evolutionary Computation: Mauro Castelli, Gianpiero Cattaneo, Luca Manzoni, Leonardo VanneschiDocument10 pagesSwarm and Evolutionary Computation: Mauro Castelli, Gianpiero Cattaneo, Luca Manzoni, Leonardo VanneschiSusana PaçoNo ratings yet
- 161706-Article Text-418995-1-10-20170929Document6 pages161706-Article Text-418995-1-10-20170929RoberticoZeaNo ratings yet
- A Grasp Algorithm To Solve The Unicost Set Covering Problem: Joaquín Bautista, Jordi PereiraDocument8 pagesA Grasp Algorithm To Solve The Unicost Set Covering Problem: Joaquín Bautista, Jordi PereiraPamela HendricksNo ratings yet
- Optimization of Space Structures Using Genetic AlgorithmsDocument7 pagesOptimization of Space Structures Using Genetic AlgorithmsVarsha GokakNo ratings yet
- Wu 2011Document23 pagesWu 2011Human PersonNo ratings yet
- Functional Models For Regression Tree Leaves: Luís TorgoDocument9 pagesFunctional Models For Regression Tree Leaves: Luís TorgoLoh Jia SinNo ratings yet
- Technical Report No. 1/12, February 2012 Jackknifing The Ridge Regression Estimator: A Revisit Mansi Khurana, Yogendra P. Chaubey and Shalini ChandraDocument22 pagesTechnical Report No. 1/12, February 2012 Jackknifing The Ridge Regression Estimator: A Revisit Mansi Khurana, Yogendra P. Chaubey and Shalini ChandraRatna YuniartiNo ratings yet
- 6 Portfolio Optimization With Linear and FixedTCDocument25 pages6 Portfolio Optimization With Linear and FixedTCfiras trabelsiNo ratings yet
- 10 1 1 19 4058 PDFDocument72 pages10 1 1 19 4058 PDFAlisha ShnazNo ratings yet
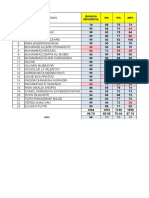
- Aplikasi Penilaian K13 2017-2018Document4 pagesAplikasi Penilaian K13 2017-2018AnwarNo ratings yet
- Symmetry 11 00248 PDFDocument31 pagesSymmetry 11 00248 PDFnadunnnNo ratings yet
- Daftar Ujian Insan Teladan IESDocument2 pagesDaftar Ujian Insan Teladan IESnadunnnNo ratings yet
- HW 3 SolutionsDocument9 pagesHW 3 SolutionsnadunnnNo ratings yet
- Lecture10 PDFDocument8 pagesLecture10 PDFnadunnnNo ratings yet
- hwk1 SolDocument6 pageshwk1 SolnadunnnNo ratings yet
- Web Description MATLABDocument32 pagesWeb Description MATLABnadunnnNo ratings yet
- A Genetic Algorithm Based Approach For The Uncapacitated Continuous Location-Allocation ProblemDocument20 pagesA Genetic Algorithm Based Approach For The Uncapacitated Continuous Location-Allocation ProblemnadunnnNo ratings yet
- 1 s2.0 0377042793901485 MainDocument10 pages1 s2.0 0377042793901485 MainnadunnnNo ratings yet
- Web Description MATLABDocument32 pagesWeb Description MATLABnadunnnNo ratings yet
- Psychometrika VOL NO Eptember DOI S: VirtualDocument19 pagesPsychometrika VOL NO Eptember DOI S: VirtualnadunnnNo ratings yet
- M00 Sarifah PreliminaryDocument9 pagesM00 Sarifah PreliminarynadunnnNo ratings yet
- Psychometrika VOL NO Eptember DOI S: VirtualDocument19 pagesPsychometrika VOL NO Eptember DOI S: VirtualnadunnnNo ratings yet
- Web Description MATLABDocument32 pagesWeb Description MATLABnadunnnNo ratings yet
- PROJECTDocument34 pagesPROJECTBiswajit PaulNo ratings yet
- STS - Finals-The World Wide Web and BiodiversityDocument34 pagesSTS - Finals-The World Wide Web and BiodiversityChristian paul ArnaizNo ratings yet
- VIDS Message Center Keypad Operator Instruction: D10R D11R D11R CDDocument24 pagesVIDS Message Center Keypad Operator Instruction: D10R D11R D11R CDADJIMGARNo ratings yet
- BSP BioChem LitV1.0Document2 pagesBSP BioChem LitV1.0Maurits TobingNo ratings yet
- 64 BitsDocument8 pages64 BitsTatyanazaxarova2No ratings yet
- Basic Electrical &electronics Engineering Lab Practice Course ContentsDocument2 pagesBasic Electrical &electronics Engineering Lab Practice Course ContentsBhanoth MohanNo ratings yet
- Part 2: Chapter 1-IntroductionDocument26 pagesPart 2: Chapter 1-IntroductionSeif AshrafNo ratings yet
- INGLES 1. Ultima Version.Document45 pagesINGLES 1. Ultima Version.C̶r̶i̶s̶t̶h̶i̶a̶n̶ V̶e̶r̶a̶ ̶Al̶m̶e̶i̶d̶a̶No ratings yet
- Subnetting ItexampracticeDocument12 pagesSubnetting ItexampracticeMohammad Tayyab KhusroNo ratings yet
- Procurement Strategy: By: Reden Delos Santos Mojica Jen Marjorie F. Nicolas Wesley Rabe Jetro TorresDocument33 pagesProcurement Strategy: By: Reden Delos Santos Mojica Jen Marjorie F. Nicolas Wesley Rabe Jetro Torresrl magsino100% (1)
- Amazon Web Services in Action, Third Edition - Google BooksDocument2 pagesAmazon Web Services in Action, Third Edition - Google Bookskalinayak.prasadNo ratings yet
- Blues Scales PDFDocument2 pagesBlues Scales PDFWayne OnSaxNo ratings yet
- DYNSIM Silent Install GuideDocument12 pagesDYNSIM Silent Install Guidepolaris44No ratings yet
- WIT-Color Ultra 9600 High Definition Printer User ManualDocument62 pagesWIT-Color Ultra 9600 High Definition Printer User ManualHerbert M. ZaycoNo ratings yet
- COM4805 Assignment 1Document33 pagesCOM4805 Assignment 1Jason Warren BlandNo ratings yet
- 31027718-HUAWEI BSC6000 System DescriptionDocument84 pages31027718-HUAWEI BSC6000 System Descriptionabkarimtc100% (1)
- Layout Lec 02 Var Rel v01Document31 pagesLayout Lec 02 Var Rel v01Ahmed MetwalyNo ratings yet
- Tiruchendurmurugan - Hrce.tn - Gov.in Ticketing Reports e Acknowledgement View - PHP Transid 20240131103116000190Document2 pagesTiruchendurmurugan - Hrce.tn - Gov.in Ticketing Reports e Acknowledgement View - PHP Transid 20240131103116000190vadivoo.1967No ratings yet
- Customization Manual BV Fam R2.3 (Software Release 2.5.1)Document51 pagesCustomization Manual BV Fam R2.3 (Software Release 2.5.1)Bassam GhaziNo ratings yet
- Guidance Material and Best Practices For MPL ImplementationDocument128 pagesGuidance Material and Best Practices For MPL ImplementationAzlan Abdul AzizNo ratings yet
- Foxtools Overview: Note The Foxtools Functions Aren't Supported by Microsoft Product SupportDocument46 pagesFoxtools Overview: Note The Foxtools Functions Aren't Supported by Microsoft Product Supportp. .anthianNo ratings yet
- Data Warehousing and Data Mining Lab ManualDocument30 pagesData Warehousing and Data Mining Lab ManualBabuYgNo ratings yet
- DevOps Chapter 1Document60 pagesDevOps Chapter 1vort100% (1)
- Video Cassette Recorder: Instruction ManualDocument24 pagesVideo Cassette Recorder: Instruction ManualPaweł MyczkaNo ratings yet
- Google Ads Certification - Study GuideDocument6 pagesGoogle Ads Certification - Study GuideHadassa KalungaNo ratings yet
- PLC Wiring Q&aDocument59 pagesPLC Wiring Q&apascal sitanggangNo ratings yet
- PSPICE Simulation of Three-Phase Inverters by Means of Swiching Functions (Salazar Joós)Document8 pagesPSPICE Simulation of Three-Phase Inverters by Means of Swiching Functions (Salazar Joós)luism_falconiNo ratings yet
- Attacking IEC-60870-5-104 SCADA Systems PDFDocument6 pagesAttacking IEC-60870-5-104 SCADA Systems PDFJoao MartinsNo ratings yet
- Cada Clase de Entidad en La Topología Debe Tener Un Rango Asignado para Controlar Cuánto Se Moverán Las Entidades Cuando Se Valida La TopologíaDocument11 pagesCada Clase de Entidad en La Topología Debe Tener Un Rango Asignado para Controlar Cuánto Se Moverán Las Entidades Cuando Se Valida La TopologíaMauricio PozoNo ratings yet
- Maths Unit 1 and Unit 2Document36 pagesMaths Unit 1 and Unit 2saisastra3No ratings yet