You might also like
- m4d Installation ManualDocument72 pagesm4d Installation ManualBiblioteca Brasil Aviation0% (1)
- Simulation - Thermal AssignmentDocument2 pagesSimulation - Thermal Assignmentsumardiono10No ratings yet
- Line Current Differential Protection and The Age of Ethernet-Based Wide-Area CommunicationsDocument8 pagesLine Current Differential Protection and The Age of Ethernet-Based Wide-Area CommunicationsRodNo ratings yet
- Effect of BLDC Motor Commutation Schemes On Inverter Capacitor Size SelectionDocument5 pagesEffect of BLDC Motor Commutation Schemes On Inverter Capacitor Size SelectionXristos LianNo ratings yet
- Brushless DC MotorDocument11 pagesBrushless DC MotorCarroll Sarmeje100% (1)
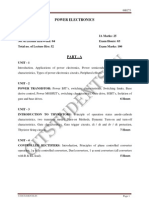
- Power ElectronicsDocument264 pagesPower ElectronicsJayashree C RaoNo ratings yet
- PROCESS AUTOMATION LAB Board Exam Question PaperDocument2 pagesPROCESS AUTOMATION LAB Board Exam Question Paperchockalingam athilingamNo ratings yet
- 13 - Instrumentation & ControlDocument11 pages13 - Instrumentation & ControlNoman AslamNo ratings yet
- Design and Fabrication of Thermoelectric Cooler Cum HeaterDocument8 pagesDesign and Fabrication of Thermoelectric Cooler Cum HeaterSelva BabuNo ratings yet
- Week 7A - Online Classes - S2020Document16 pagesWeek 7A - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- Lab View Based Speed Control of DC Motor Using PID Controller-1582Document6 pagesLab View Based Speed Control of DC Motor Using PID Controller-1582user01254No ratings yet
- PLC Based Laser Control UnitDocument24 pagesPLC Based Laser Control UnitBrahmanandareddy ReddyNo ratings yet
- Manual Cutler HammerDocument114 pagesManual Cutler HammerMarcelo Palacios SantanaNo ratings yet
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatNo ratings yet
- Topic 8 PLCDocument26 pagesTopic 8 PLCKrista JacksonNo ratings yet
- PLC NittDocument58 pagesPLC NittVignesh Meyyappan100% (1)
- TP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimesDocument7 pagesTP 1800 DC-DC Converter For Hybrid Electric Vehicle and EV ArrowTimespapipapii100% (1)
- Generating 50Hz PWM Using PIC16F877ADocument2 pagesGenerating 50Hz PWM Using PIC16F877AZarko DacevicNo ratings yet
- Commander SK Size A To D Getting Started GuideDocument54 pagesCommander SK Size A To D Getting Started GuidesunhuynhNo ratings yet
- VSD Advantages, Disadvantages, Selection Criteria and Installation Tips and TricksDocument18 pagesVSD Advantages, Disadvantages, Selection Criteria and Installation Tips and TricksMike CerreroNo ratings yet
- SLUP079Document46 pagesSLUP079bookreader1968No ratings yet
- Capacitive MicrophoneDocument17 pagesCapacitive MicrophoneGeethakshayaNo ratings yet
- Study of Wireless Power Transfer SynopsisDocument9 pagesStudy of Wireless Power Transfer SynopsisAnkitha G NayakaNo ratings yet
- 1.single Phase AC To DC Fully Controlled Converter PDFDocument10 pages1.single Phase AC To DC Fully Controlled Converter PDFAshwin RaghavanNo ratings yet
- Conservation of Fuel by Auto Start and Stop of Si EngineDocument7 pagesConservation of Fuel by Auto Start and Stop of Si EnginetirutkkNo ratings yet
- Rashid Ch03 ImagesDocument69 pagesRashid Ch03 ImagesAtiq Ur RehmanNo ratings yet
- PID Controller With Feedforward Low Pass Filters For Permanent Magnet Stepper MotorsDocument4 pagesPID Controller With Feedforward Low Pass Filters For Permanent Magnet Stepper Motorsprateek agarwalNo ratings yet
- ME/MTECH ELECTRICAL Project ListDocument7 pagesME/MTECH ELECTRICAL Project ListBUDDHA ELECTRICAL SMART TECHNOLOGIESNo ratings yet
- Intelligent Management of Electrical Systems in IndustriesDocument29 pagesIntelligent Management of Electrical Systems in Industriesh_akbarshariff50% (2)
- Flow Control Trainer (GUNT)Document3 pagesFlow Control Trainer (GUNT)Harry HutamaNo ratings yet
- PV BoostDocument6 pagesPV BoostlestherroqueNo ratings yet
- Focussed Question Bank With AnswersDocument18 pagesFocussed Question Bank With AnswersHari Krishnan100% (1)
- ¡ Digital Control in Power Electronics¡ by Simone Buso and Paolo MattavelliDocument159 pages¡ Digital Control in Power Electronics¡ by Simone Buso and Paolo MattavellidevchandarNo ratings yet
- 4th Term PLC Lab ManualDocument8 pages4th Term PLC Lab ManualOPIYO ONYANGONo ratings yet
- Outline: - Why Empirical Tuning? - Procedure For Empirical Tuning. - ExampleDocument4 pagesOutline: - Why Empirical Tuning? - Procedure For Empirical Tuning. - ExampleGreenhearthazel Varma PdgNo ratings yet
- Introduction To Power Electronics (Benny Yeung)Document9 pagesIntroduction To Power Electronics (Benny Yeung)Souvik GanguliNo ratings yet
- Review of Pole Placement & Pole Zero Cancellation Method For Tuning PID Controller of A Digital Excitation Control SystemDocument10 pagesReview of Pole Placement & Pole Zero Cancellation Method For Tuning PID Controller of A Digital Excitation Control SystemIJSTENo ratings yet
- Industrial Instrumentation 05EE 62XXDocument56 pagesIndustrial Instrumentation 05EE 62XXwhiteelephant93No ratings yet
- Voltage Regulation GeneratorsDocument29 pagesVoltage Regulation Generatorsprabhakaran_hdecNo ratings yet
- "Control Systems Engineering": Text Book: Chapter 3 (NN 6 Ed)Document18 pages"Control Systems Engineering": Text Book: Chapter 3 (NN 6 Ed)umair khalilNo ratings yet
- InstaSPIN™ BLDC LabDocument16 pagesInstaSPIN™ BLDC LabTrong LeNo ratings yet
- Vendor Sample ProjectsDocument5 pagesVendor Sample ProjectsCassio Rafael R RNo ratings yet
- Image Processing Based Robotics PDFDocument45 pagesImage Processing Based Robotics PDFaamirraihanNo ratings yet
- A PID Decoupling Controller Based On DRNNDocument4 pagesA PID Decoupling Controller Based On DRNNIJEC_EditorNo ratings yet
- Lecture 1 SlidIntroduction To Power ElectronicseDocument37 pagesLecture 1 SlidIntroduction To Power ElectronicseCIMUT125No ratings yet
- chp7 3 Economic Dispatch PDFDocument11 pageschp7 3 Economic Dispatch PDFdo3llah100% (1)
- Study and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationDocument17 pagesStudy and Design, Simulation of PWM Based Buck Converter For Low Power ApplicationIOSRjournalNo ratings yet
- Advanced Instrumentation Solutions Crafted With Highest PrecisionDocument6 pagesAdvanced Instrumentation Solutions Crafted With Highest PrecisionSandeep K Tiwari0% (1)
- Operation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurDocument6 pagesOperation of DC/DC Converter For Hybrid Electric Vehicle: Atul Kumar and Prerna GaurAhana MalhotraNo ratings yet
- Question BankDocument19 pagesQuestion BankanbuelectricalNo ratings yet
- Active Disturbance Rejection Control for Nonlinear Systems: An IntroductionFrom EverandActive Disturbance Rejection Control for Nonlinear Systems: An IntroductionNo ratings yet
- Fundamentals of Instrumentation and MeasurementFrom EverandFundamentals of Instrumentation and MeasurementRating: 5 out of 5 stars5/5 (1)
- High Voltage Direct Current Transmission: Converters, Systems and DC GridsFrom EverandHigh Voltage Direct Current Transmission: Converters, Systems and DC GridsNo ratings yet
- Distributed Computer Control Systems 1981: Proceedings of the Third IFAC Workshop, Beijing, China, 15-17 August 1981From EverandDistributed Computer Control Systems 1981: Proceedings of the Third IFAC Workshop, Beijing, China, 15-17 August 1981No ratings yet
- Research and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968From EverandResearch and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968No ratings yet
- Suspension Systems PDFDocument34 pagesSuspension Systems PDFAnthony SchultzNo ratings yet
- MINUTES - 257th Senate Meeting - Part A OnlyDocument13 pagesMINUTES - 257th Senate Meeting - Part A Onlyvignesh0617No ratings yet
- Ogata Root LocusDocument32 pagesOgata Root Locusvignesh0617100% (1)
- Admission Notice 2nd Round 2012 For RTEDocument2 pagesAdmission Notice 2nd Round 2012 For RTEvignesh0617No ratings yet
- Matrix ExponentialDocument14 pagesMatrix Exponentialvignesh0617No ratings yet
- IGVCRules 2013Document24 pagesIGVCRules 2013vignesh0617No ratings yet
- BBT 4103-Lab Assignment-March 2018Document6 pagesBBT 4103-Lab Assignment-March 2018Mistar BonzNo ratings yet
- Kivy Cookbook - Sample ChapterDocument33 pagesKivy Cookbook - Sample ChapterPackt PublishingNo ratings yet
- Web ProjectDocument15 pagesWeb ProjectRaja JeeNo ratings yet
- S01 Hydraulic Cylinders - All CylindersDocument16 pagesS01 Hydraulic Cylinders - All Cylindersmartin medinaNo ratings yet
- Microprocessor 1Document73 pagesMicroprocessor 1Rishi KeshNo ratings yet
- International Journal Paper On Image Encryption Using AES AlgorithmDocument8 pagesInternational Journal Paper On Image Encryption Using AES AlgorithmfarhanrpatelNo ratings yet
- XVR5108HE-4KL-I3 Datasheet 20220316Document3 pagesXVR5108HE-4KL-I3 Datasheet 20220316hans anyaipomaNo ratings yet
- AQA - Assembly Language Mnemonics CommandsDocument1 pageAQA - Assembly Language Mnemonics CommandsSinjini SarkarNo ratings yet
- Building A Recommendation Engine With Scala by Saleem A. AnsariDocument5 pagesBuilding A Recommendation Engine With Scala by Saleem A. AnsariEgie Yoga PradanaNo ratings yet
- Aim & OumDocument4 pagesAim & Oumtsurendar100% (1)
- ANVESHAN 2023 FormDocument4 pagesANVESHAN 2023 FormVikrant KumarNo ratings yet
- LD5100 Software DIPSW List (For PR5100 Ver)Document10 pagesLD5100 Software DIPSW List (For PR5100 Ver)memetNo ratings yet
- Bento S 24 700 Ma 4000K ASY10 10-06-2022 13-13-06Document4 pagesBento S 24 700 Ma 4000K ASY10 10-06-2022 13-13-06ArlandooNo ratings yet
- Epanet Vs Watergems (083011)Document9 pagesEpanet Vs Watergems (083011)MABA02100% (1)
- Tor - Bd-China FriendshipDocument17 pagesTor - Bd-China FriendshipRana MasudNo ratings yet
- Ict in SupermarketsDocument13 pagesIct in SupermarketsOladipo Chukwudi OluwaseunNo ratings yet
- Internship ReportDocument5 pagesInternship ReportAbaad AliNo ratings yet
- Phillips Universal Remote Sbc-Ru-252Document18 pagesPhillips Universal Remote Sbc-Ru-252Malo ModeNo ratings yet
- Manual de Fallas or BobcatDocument4 pagesManual de Fallas or BobcatRichard ZapataNo ratings yet
- The Stentor Active Antenna Design Performances and Measurement RDocument6 pagesThe Stentor Active Antenna Design Performances and Measurement RFathima Thasleema NNo ratings yet
- Sybase ASE 16 InstallDocument21 pagesSybase ASE 16 Installcmurali738No ratings yet
- Protection Interview Question BookDocument38 pagesProtection Interview Question Bookarsalanhamid100% (6)
- ScamperDocument35 pagesScamperKate Hera RiegoNo ratings yet
- Swath 1.SPSDocument33 pagesSwath 1.SPSFät MãNo ratings yet
- 9.13 Surge Protection For PROFIBUS FMS, PROFIBUS DP, and Profibus PaDocument4 pages9.13 Surge Protection For PROFIBUS FMS, PROFIBUS DP, and Profibus PaRodrigoBurgosNo ratings yet
- Finding Mandatory Fields For An Infotype in SAP HRDocument11 pagesFinding Mandatory Fields For An Infotype in SAP HRMercedesNo ratings yet
- Data Sheet System TV 51140-C Eng V07Document2 pagesData Sheet System TV 51140-C Eng V07AekDzLaiNo ratings yet
- OS5Document15 pagesOS5Kaustubh patilNo ratings yet
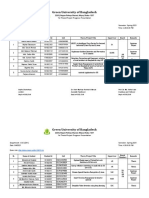
- Green University of Bangladesh: Zoom LinkDocument8 pagesGreen University of Bangladesh: Zoom LinkMaheen RafiNo ratings yet