You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Apex CheatsheetDocument4 pagesApex CheatsheetAmit GangwarNo ratings yet
- Tunnel Thru The Air Correct Starting PointDocument2 pagesTunnel Thru The Air Correct Starting Pointkhit wong54% (13)
- F639 1479757-1Document3 pagesF639 1479757-1Thaweekarn ChangthongNo ratings yet
- BSDocument1 pageBSDrSrujana ReddyNo ratings yet
- ABDUS CH02 LiverDocument17 pagesABDUS CH02 LiverDrSrujana ReddyNo ratings yet
- Stream #: Registration No.Document1 pageStream #: Registration No.DrSrujana ReddyNo ratings yet
- Instruction!!Document1 pageInstruction!!Varad SahasrabudheNo ratings yet
- Hall TicketDocument1 pageHall TicketDrSrujana ReddyNo ratings yet
- PDFDocument1 pagePDFDrSrujana ReddyNo ratings yet
- DR 7Document1 pageDR 7DrSrujana ReddyNo ratings yet
- Hall Ticket PDFDocument1 pageHall Ticket PDFDrSrujana ReddyNo ratings yet
- Antares: Acknowledgement of Tender SubmissionDocument1 pageAntares: Acknowledgement of Tender SubmissionDrSrujana ReddyNo ratings yet
- 2016 Zoom Lens Chart v17Document2 pages2016 Zoom Lens Chart v17freebooksNo ratings yet
- MMDR Act 2015Document12 pagesMMDR Act 2015Sri Harsha EnjarapuNo ratings yet
- VP Pre-Tenancy Agreement r2.1Document3 pagesVP Pre-Tenancy Agreement r2.1DrSrujana ReddyNo ratings yet
- TS-iPASSDocument2 pagesTS-iPASSDrSrujana ReddyNo ratings yet
- Sabiston Textbook of Surgery, 19th Ed: VGHTCDocument85 pagesSabiston Textbook of Surgery, 19th Ed: VGHTCaldiansyahraufNo ratings yet
- German Courses in MünchenDocument4 pagesGerman Courses in MünchenDrSrujana ReddyNo ratings yet
- German Courses in MünchenDocument4 pagesGerman Courses in MünchenDrSrujana ReddyNo ratings yet
- 2016 Zoom Lens Chart v17Document2 pages2016 Zoom Lens Chart v17freebooksNo ratings yet
- Sabiston Textbook of Surgery, 19th Ed: VGHTCDocument85 pagesSabiston Textbook of Surgery, 19th Ed: VGHTCaldiansyahraufNo ratings yet
- Separation Control On NACA23012 Using Synthetic JetDocument11 pagesSeparation Control On NACA23012 Using Synthetic JetDrSrujana ReddyNo ratings yet
- Flow Control of A Sharp-Edged AirfoilDocument11 pagesFlow Control of A Sharp-Edged AirfoilDrSrujana ReddyNo ratings yet
- Script of Nikhil Advani's D Day - Shooting DraftDocument117 pagesScript of Nikhil Advani's D Day - Shooting Draftmoifightclub100% (8)
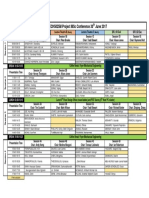
- MECH5825M Conference Schedule FINAL 30 June 2017 Venue Chairs PresentersDocument1 pageMECH5825M Conference Schedule FINAL 30 June 2017 Venue Chairs PresentersDrSrujana ReddyNo ratings yet
- 29116292Document1 page29116292DrSrujana ReddyNo ratings yet
- Simulation and Optimization of Stall Control For An Airfoil With A Synthetic JetDocument9 pagesSimulation and Optimization of Stall Control For An Airfoil With A Synthetic JetDrSrujana ReddyNo ratings yet
- VUTLA Sandeep 201062601Document9 pagesVUTLA Sandeep 201062601DrSrujana ReddyNo ratings yet
- Syndicate Cinema: An Advaita Motion Pictures ComapnyDocument1 pageSyndicate Cinema: An Advaita Motion Pictures ComapnyDrSrujana ReddyNo ratings yet
- Naca Report 385Document36 pagesNaca Report 385DrSrujana ReddyNo ratings yet
- Mn16srv Report 1Document15 pagesMn16srv Report 1DrSrujana ReddyNo ratings yet
- VP Pre-Tenancy Agreement r2.1Document3 pagesVP Pre-Tenancy Agreement r2.1DrSrujana ReddyNo ratings yet
- Application Letter: Jl. Kayu Aya No. 10 A, Kerobokan, Kuta Utara, Badung, BaliDocument3 pagesApplication Letter: Jl. Kayu Aya No. 10 A, Kerobokan, Kuta Utara, Badung, BaliIRMA DAMAYANTINo ratings yet
- Gas Cutting - by KiranDocument40 pagesGas Cutting - by KiransridharchebroluNo ratings yet
- Action and Event ListenerDocument6 pagesAction and Event ListenerFionaLimYongXinNo ratings yet
- CompanyDocument7 pagesCompanylotchanNo ratings yet
- Shaker SK L180 SDocument1 pageShaker SK L180 SUPT LABKESDA KAB PADANG PARIAMANNo ratings yet
- Crafting The Service Environment: Text Book Chapter 10Document25 pagesCrafting The Service Environment: Text Book Chapter 10Sneha DussaramNo ratings yet
- Sample Waste Management Tracking FormDocument3 pagesSample Waste Management Tracking FormSreekumarNo ratings yet
- AccountingDocument45 pagesAccountingAfia ZaheenNo ratings yet
- Revised Research Request Form Undergrad and Masteral Back FrontDocument4 pagesRevised Research Request Form Undergrad and Masteral Back Frontmichael tampusNo ratings yet
- Synopsis Format-Practice SchoolDocument4 pagesSynopsis Format-Practice SchoolArjun GoyalNo ratings yet
- Online Medical Delivery ServiceDocument10 pagesOnline Medical Delivery ServiceYESHUDAS JIVTODENo ratings yet
- Egs630-6 Komatsu GensetDocument2 pagesEgs630-6 Komatsu GensetimamfadiliNo ratings yet
- Lesson - TrendsDocument26 pagesLesson - TrendsLloydNo ratings yet
- Constructionandmaintenanceof Riverembankments (Levees) - GuidelinesDocument7 pagesConstructionandmaintenanceof Riverembankments (Levees) - GuidelinesSushil DhunganaNo ratings yet
- Reptilian Astral WarsDocument4 pagesReptilian Astral WarsAlienraces1No ratings yet
- Principles of Engineering Thermodynamics - SI Version 8th EditionDocument47 pagesPrinciples of Engineering Thermodynamics - SI Version 8th EditionanabNo ratings yet
- Personal Surveyor 200 User Handbook: Gas Measurement Instruments LTDDocument92 pagesPersonal Surveyor 200 User Handbook: Gas Measurement Instruments LTDGiang TrườngNo ratings yet
- Inv - 2469306Document2 pagesInv - 2469306rajeshNo ratings yet
- MKTED208071EN CatalogueDocument618 pagesMKTED208071EN Cataloguecarlos augustoNo ratings yet
- Module 2 - Introduction To Programming - UpdatedDocument30 pagesModule 2 - Introduction To Programming - UpdatedKen FirmalanNo ratings yet
- Kidstone Mines Start UpDocument5 pagesKidstone Mines Start UpCraftychemistNo ratings yet
- Pallet Truck wp3000 Spec1 GBDocument6 pagesPallet Truck wp3000 Spec1 GBEjaz EjazNo ratings yet
- Max-E2/841™ Family Nema Premium Efficiency: Type Aehh8B, Aehh8Bcf, Aeuh8BdcDocument1 pageMax-E2/841™ Family Nema Premium Efficiency: Type Aehh8B, Aehh8Bcf, Aeuh8BdcAnibal QuezadaNo ratings yet
- Chap1 Organizational Behavior 2020Document52 pagesChap1 Organizational Behavior 2020DarshanNo ratings yet
- Shadowfinder - Big Damn HeroesDocument30 pagesShadowfinder - Big Damn HeroesSteampunkObrimos100% (1)
- Prosperity Power Signature PDFDocument31 pagesProsperity Power Signature PDFOscar NygrenNo ratings yet
- AtmakarakaDocument3 pagesAtmakarakaswamyvk100% (1)