You might also like
- 740 Artiiculated Truck Power TrainDocument37 pages740 Artiiculated Truck Power TrainFabrizio Jesús100% (1)
- Cat 12 12v Electic TrainingDocument26 pagesCat 12 12v Electic TrainingZenaki Kurniawan100% (1)
- ElectronicComponent INPUT, OUPUTDocument48 pagesElectronicComponent INPUT, OUPUTtaller avansys100% (3)
- Hydraulic TrainingDocument128 pagesHydraulic TrainingRaj100% (1)
- 12V24V Electrical SystemsDocument26 pages12V24V Electrical SystemsAllan Lariosa100% (17)
- Course Caterpillar c6 6 Engines Acert Technology BenefitsDocument34 pagesCourse Caterpillar c6 6 Engines Acert Technology BenefitsGanapati Hegde100% (9)
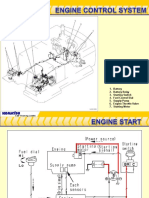
- Battery 2. Battery Relay 3. Starting Switch 4. Fuel Control Dial 5. Supply Pump 6. Engine Throttle Valve 7. Starting MotorDocument29 pagesBattery 2. Battery Relay 3. Starting Switch 4. Fuel Control Dial 5. Supply Pump 6. Engine Throttle Valve 7. Starting MotorSamidi100% (3)
- Electronic Sensor and SystemDocument30 pagesElectronic Sensor and SystemDammiam Gatica100% (2)
- Hydraulic Fan Student Booklet EngDocument16 pagesHydraulic Fan Student Booklet Engali100% (2)
- Serv7107 V05N01 TXT7Document32 pagesServ7107 V05N01 TXT7azry_alqadry100% (7)
- Acert Technology For C7 and C9 On-Highway Engines Introduction To Mechanical ChangesDocument40 pagesAcert Technology For C7 and C9 On-Highway Engines Introduction To Mechanical ChangesGallego Carlos100% (1)
- HEUI Cleanout Procedure by Holt-May 2007Document8 pagesHEUI Cleanout Procedure by Holt-May 2007Alvaro PomaNo ratings yet
- Powerpoint 345Document75 pagesPowerpoint 345Juan Asarcado100% (9)
- Elect Sect01Document113 pagesElect Sect01Luis Eduardo Corzo Enriquez100% (4)
- PDF c7 Specifications Systems Operation Testing and Adjusting - CaterpillarDocument88 pagesPDF c7 Specifications Systems Operation Testing and Adjusting - CaterpillarOtong KruwelNo ratings yet
- Sistema de Traslado - TextoDocument32 pagesSistema de Traslado - Textolalo11715100% (2)
- 6HEUIDocument27 pages6HEUIEricsson Via100% (1)
- Caterpillar Cat 16H NA Motor Grader (Prefix 6ZJ) Service Repair Manual (6ZJ00001 and Up)Document27 pagesCaterpillar Cat 16H NA Motor Grader (Prefix 6ZJ) Service Repair Manual (6ZJ00001 and Up)kfm8seuudu100% (1)
- CAT-ENGINES Presentation 1Document107 pagesCAT-ENGINES Presentation 1Mohamed Saied100% (3)
- Elect. Eng. Control: Service Training MalagaDocument27 pagesElect. Eng. Control: Service Training MalagayoelNo ratings yet
- Global Service Learning: 300D Series Hydraulic Excavators - Tier Iii EnginesDocument23 pagesGlobal Service Learning: 300D Series Hydraulic Excavators - Tier Iii Enginesazry_alqadry100% (3)
- SLD Elect Sect01Document78 pagesSLD Elect Sect01puput utomo100% (1)
- PEHJ0166Document4 pagesPEHJ0166Oskitar Jonathan0% (1)
- Course Caterpillar 3408 3412 3126b Heui Engines Components Oil Flow System IDocument24 pagesCourse Caterpillar 3408 3412 3126b Heui Engines Components Oil Flow System IX'mix ĐreamerNo ratings yet
- Excavtor HYDDocument54 pagesExcavtor HYDTamer SalahNo ratings yet
- Over The Road Engine Service TrainingDocument318 pagesOver The Road Engine Service Trainingibrahem100% (3)
- CAT 01 Hydraulic Fundamental Student GuideDocument30 pagesCAT 01 Hydraulic Fundamental Student GuideChristianSutanto100% (1)
- Ciruitos de Boom, Stick y Bucket - TextoDocument46 pagesCiruitos de Boom, Stick y Bucket - Textolalo11715100% (2)
- Load Sensing/Pressure Compensated Hydraulics (LS/PC)Document15 pagesLoad Sensing/Pressure Compensated Hydraulics (LS/PC)Victor AcuñaNo ratings yet
- Cursos de Meui Eui HeuiDocument318 pagesCursos de Meui Eui HeuiLaboratoriodiesel Tachira Ca100% (8)
- Course Engine Control Caterpillar 992g Wheel Loader Components Operation PDFDocument23 pagesCourse Engine Control Caterpillar 992g Wheel Loader Components Operation PDFBruno Cecatto100% (1)
- SERV1847 - TXT3 - EngineDocument65 pagesSERV1847 - TXT3 - Enginefrezgi birhanu100% (3)
- 4 - Interp I Training For Tier 4 v2Document27 pages4 - Interp I Training For Tier 4 v2DAniel100% (1)
- 005 - Cat-6060 - Tank, Pump, Drive Controller - Without XLRDocument23 pages005 - Cat-6060 - Tank, Pump, Drive Controller - Without XLRJorby CuadrosNo ratings yet
- Load Sensing2Document6 pagesLoad Sensing2Victor Acuña0% (1)
- Fuel System Mui Eui HeuiDocument49 pagesFuel System Mui Eui Heuieng83% (6)
- Diesel Injection PumpDocument24 pagesDiesel Injection PumpDwight Solina100% (1)
- Diagnostico y TroubleshootingDocument40 pagesDiagnostico y Troubleshootinggabriel pacovilca arhuata100% (1)
- SESV1661Document128 pagesSESV1661Yapi Yapi100% (1)
- Troubleshooting Guide For The HydraulicDocument5 pagesTroubleshooting Guide For The Hydraulicweldsaidi100% (1)
- Basicele Electriciadad y SensoresDocument41 pagesBasicele Electriciadad y SensoresCarcaustoCatt Benk100% (2)
- D9T Schematic TransmissionDocument2 pagesD9T Schematic Transmissionjulio peña lima100% (1)
- Static RelaysDocument89 pagesStatic RelaysAnonymous DbmKEDxNo ratings yet
- Curvas, Gobernadores, Full Timing, Full Setting, MUI, HEUIDocument318 pagesCurvas, Gobernadores, Full Timing, Full Setting, MUI, HEUIRoberto Carrasco100% (4)
- Enginesystems Dieselengineanalyst Parte2 130115174627 Phpapp02Document30 pagesEnginesystems Dieselengineanalyst Parte2 130115174627 Phpapp02Dadang Lukmanul Hakim100% (2)
- Common Rail Fuel Sytem - April 07Document23 pagesCommon Rail Fuel Sytem - April 07Juan Asarcado100% (2)
- Maquinas Electronicas CaterpillarDocument46 pagesMaquinas Electronicas CaterpillarJuan AmanquiNo ratings yet
- Travel Systems - 7Document59 pagesTravel Systems - 7اياد القباطيNo ratings yet
- Chapter 2 - EUI EngineDocument17 pagesChapter 2 - EUI Enginenajafali100% (3)
- Pneumatic and Hydraulic Components and Instruments in Automatic Control: Proceedings of the IFAC Symposium, Warsaw, Poland, 20-23 May 1980From EverandPneumatic and Hydraulic Components and Instruments in Automatic Control: Proceedings of the IFAC Symposium, Warsaw, Poland, 20-23 May 1980H. J. LeskiewiczRating: 1 out of 5 stars1/5 (1)
- Turbovisory InstrumentsDocument21 pagesTurbovisory InstrumentsSupratim Pal100% (6)
- C13, C15, and C18 Engines Alternator Problem - Charging Problem Andor Noisy OperationDocument3 pagesC13, C15, and C18 Engines Alternator Problem - Charging Problem Andor Noisy OperationRaphael ThornerNo ratings yet
- Systems Operation 3406Document32 pagesSystems Operation 3406bedoo54No ratings yet
- Swing Motor - Test - Measurement of Case Drain OilDocument4 pagesSwing Motor - Test - Measurement of Case Drain Oilmekanicobucaro100% (1)
- ENSC 387 Sensors and ActuatorsDocument117 pagesENSC 387 Sensors and ActuatorsMajed KawamNo ratings yet
- Tong TesterDocument9 pagesTong Testeranilakash442No ratings yet
- Tong TesterDocument10 pagesTong TesterGanesh Kumar Naidu100% (1)
- MSD Module 2Document98 pagesMSD Module 2arvind valentinoNo ratings yet
- Ies Electronics PaperDocument26 pagesIes Electronics PaperArchana TripathiNo ratings yet
- Hall EffectDocument31 pagesHall EffectPraneshNo ratings yet