You might also like
- Isolation Transformers Reduce Drive Neutral Point VoltageDocument5 pagesIsolation Transformers Reduce Drive Neutral Point Voltagescrib_111No ratings yet
- Development of Mmlps in India: Western DFC Eastern DFCDocument2 pagesDevelopment of Mmlps in India: Western DFC Eastern DFCsdfg100% (2)
- Activity Diagram Airline Reservation System PDFDocument4 pagesActivity Diagram Airline Reservation System PDFAnonymous zSn6IALuabNo ratings yet
- Day 2 - Determining The Relevance and Truthfulness of Ideas Presented in The Material Viewed (3rd Quarter)Document12 pagesDay 2 - Determining The Relevance and Truthfulness of Ideas Presented in The Material Viewed (3rd Quarter)Ella VeronaNo ratings yet
- Sensor & TranducerDocument51 pagesSensor & Tranducereman71No ratings yet
- Power Control Devices Report Ni SottoDocument61 pagesPower Control Devices Report Ni SottoLEONEL SOTTONo ratings yet
- Switch Gear1Document35 pagesSwitch Gear1Subhasish MahapatraNo ratings yet
- Use of Shunt & Series Capacitors in Transmission LinesDocument6 pagesUse of Shunt & Series Capacitors in Transmission LinesRiyah_Rae86% (7)
- Wiring SymbolsDocument13 pagesWiring SymbolsStalin TagoreNo ratings yet
- IE Rules For DP Structure - Electrical Notes & ArticlesDocument10 pagesIE Rules For DP Structure - Electrical Notes & Articleshemant kumarNo ratings yet
- Working Principle Miniature Circuit Breaker Breaker.: Electric CurrentDocument28 pagesWorking Principle Miniature Circuit Breaker Breaker.: Electric CurrentPrashant ShahNo ratings yet
- Fuse and Types of FusesDocument5 pagesFuse and Types of FusesYasir JamilNo ratings yet
- Ac Circuit Breaker: 2.1 What Is Circuit Breaker?Document13 pagesAc Circuit Breaker: 2.1 What Is Circuit Breaker?miguel itson100% (1)
- Linear SolenoidsDocument20 pagesLinear SolenoidsAndrei ReventNo ratings yet
- Basic Circuit Analysis LawsDocument50 pagesBasic Circuit Analysis LawsMuhd RzwanNo ratings yet
- Neutral Point ShiftDocument24 pagesNeutral Point Shiftscrib_111No ratings yet
- Series Resonant Circuit: Experiment # ECE 312 LDocument4 pagesSeries Resonant Circuit: Experiment # ECE 312 LVan M M GabonNo ratings yet
- Zenith ZTG Transfer Switch: Spec SheetDocument15 pagesZenith ZTG Transfer Switch: Spec SheetDomenico SarcinaNo ratings yet
- 132 KV GSSDocument26 pages132 KV GSSPhillip LongNo ratings yet
- EET301 2013 Chapter 6Document51 pagesEET301 2013 Chapter 6Lee Boon HongNo ratings yet
- Calculate Size of Main ELCB & Brach MCB of Distribution Box - Electrical Notes & Articles PDFDocument8 pagesCalculate Size of Main ELCB & Brach MCB of Distribution Box - Electrical Notes & Articles PDFYUVA SKILL ACENo ratings yet
- Contactors and Motor StartersDocument5 pagesContactors and Motor StartersZdan AhmadNo ratings yet
- Hall Effect Current SensorDocument3 pagesHall Effect Current SensorJeyBee66No ratings yet
- Power Electronics: DR - Arkan A.Hussein Power Electronics Fourth ClassDocument13 pagesPower Electronics: DR - Arkan A.Hussein Power Electronics Fourth Classmohammed aliNo ratings yet
- How To Read MCB Nameplate Data Rating Printed On ItDocument3 pagesHow To Read MCB Nameplate Data Rating Printed On Itibrahim shahNo ratings yet
- A Study On MOSFET Gate Driver CircuitDocument7 pagesA Study On MOSFET Gate Driver CircuitPham Viet QuanNo ratings yet
- Ge2151 Beee NotesDocument143 pagesGe2151 Beee NotesNanda Subramanian100% (1)
- Power Electronics Single-Phase Half-Wave Rectifier.Document37 pagesPower Electronics Single-Phase Half-Wave Rectifier.Hassan technologist0% (1)
- 4,5. Transformers (1 Phase & 3 Phase)Document48 pages4,5. Transformers (1 Phase & 3 Phase)nakkasrinuNo ratings yet
- Single-Phase Induction MotorsDocument82 pagesSingle-Phase Induction MotorsVinay PrakashNo ratings yet
- Presentation On Air Circuit Breaker: Vidhyavardhini Institute of Technolofy PALDocument23 pagesPresentation On Air Circuit Breaker: Vidhyavardhini Institute of Technolofy PALPrathamesh MhatugadeNo ratings yet
- PE Lecture 1Document31 pagesPE Lecture 1AhmedSeragNo ratings yet
- Wye Delta Starter MotorDocument12 pagesWye Delta Starter MotorCharles NunezNo ratings yet
- Electrical Equipment: Circuit BreakerDocument43 pagesElectrical Equipment: Circuit BreakerKenneth LewisNo ratings yet
- Multimeter VIMPDocument61 pagesMultimeter VIMPSysu KumarNo ratings yet
- Voltage Regulator: Analog ElectronicsDocument46 pagesVoltage Regulator: Analog ElectronicsAkshat SinghNo ratings yet
- What Is A Circuit BreakerDocument18 pagesWhat Is A Circuit Breakersrinu247No ratings yet
- Designing Planar Magnetics DixonDocument26 pagesDesigning Planar Magnetics Dixonarulsrini77No ratings yet
- Switch Gear: Types of Switch GearsDocument6 pagesSwitch Gear: Types of Switch GearsAdeel Mustafa100% (1)
- Invertere ProjectDocument71 pagesInvertere ProjectChandan Singh100% (1)
- What Is The Difference Between MCB, MCCB, ELCB, and RCCBDocument7 pagesWhat Is The Difference Between MCB, MCCB, ELCB, and RCCBYousif_AbdalhalimNo ratings yet
- EE 442 642 IntroductionDocument14 pagesEE 442 642 IntroductionUSERNAME12340987No ratings yet
- Single Phase Motor Capacitor SizingDocument2 pagesSingle Phase Motor Capacitor Sizinghemant kumar0% (1)
- IGBTDocument12 pagesIGBT304920 ktr.eee.17No ratings yet
- Protection & SwitchgearDocument50 pagesProtection & SwitchgearvnrsamyNo ratings yet
- Circuit Breakers Lecture Notes 3Document124 pagesCircuit Breakers Lecture Notes 3Varun NarisettyNo ratings yet
- Electrical ParametersDocument16 pagesElectrical Parametersapi-295377694No ratings yet
- Basic Motor ControlDocument17 pagesBasic Motor ControlHeizen BulanNo ratings yet
- Understanding Time Current CurvesDocument9 pagesUnderstanding Time Current CurvesconstellanaNo ratings yet
- Zener DiodeDocument6 pagesZener DiodeKumar shantanu BasakNo ratings yet
- Electronic Circuits Lab Manual 13-12-11 PDFDocument54 pagesElectronic Circuits Lab Manual 13-12-11 PDFREMALLI KeerthiNo ratings yet
- Relay and Contactor in DetailDocument12 pagesRelay and Contactor in DetailSafen Bakr SiwailyNo ratings yet
- Altivar 312 - ATV312H075N4Document4 pagesAltivar 312 - ATV312H075N4Jose Norton Doria100% (1)
- DC Power Supply: King Abdulaziz University Electronics IDocument20 pagesDC Power Supply: King Abdulaziz University Electronics IMohannad S. AlghamdiNo ratings yet
- Maintenance & Repair: ElectricalDocument27 pagesMaintenance & Repair: ElectricalmeloshhkaNo ratings yet
- Boost DesignDocument4 pagesBoost DesignmuthukumartharaniNo ratings yet
- Session: 2016 2019Document27 pagesSession: 2016 2019Manmohan MeenaNo ratings yet
- Control Devices PDFDocument24 pagesControl Devices PDFjonnymarin23No ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 1Rating: 4.5 out of 5 stars4.5/5 (5)
- Cara Menggunakan Rumus Pada Fungsi Count, Counta, Countif, Countblank Dan Countifs Di Microsoft ExcelDocument5 pagesCara Menggunakan Rumus Pada Fungsi Count, Counta, Countif, Countblank Dan Countifs Di Microsoft ExcelirfanrifkyNo ratings yet
- Fungsi Left Mid RightDocument4 pagesFungsi Left Mid RightirfanrifkyNo ratings yet
- Form Nilai 1 19: Lks Xix SMK Tingkat NasionalDocument1 pageForm Nilai 1 19: Lks Xix SMK Tingkat NasionalirfanrifkyNo ratings yet
- Fungsi If (And) If (Or) Dalam ExcelDocument3 pagesFungsi If (And) If (Or) Dalam ExcelirfanrifkyNo ratings yet
- Fungsi Fungsi Program Pengolah AngkaDocument2 pagesFungsi Fungsi Program Pengolah AngkairfanrifkyNo ratings yet
- Contoh Praktek ExcelDocument14 pagesContoh Praktek ExcelirfanrifkyNo ratings yet
- Amalan "Seribu Dzikir Istimewa"Document1 pageAmalan "Seribu Dzikir Istimewa"irfanrifkyNo ratings yet
- Aspire 4530 Series SpecificationsDocument3 pagesAspire 4530 Series SpecificationsirfanrifkyNo ratings yet
- Setting Up MikroTik RouterOSDocument12 pagesSetting Up MikroTik RouterOSirfanrifkyNo ratings yet
- Synchronous Motor AC DrivesDocument40 pagesSynchronous Motor AC DrivesHarshal Thakur100% (1)
- Word Formation ListDocument8 pagesWord Formation ListpaticiaNo ratings yet
- 17333Document2 pages17333Nithya RaviNo ratings yet
- So You Want To Have Your Own Cosmetics BrandDocument3 pagesSo You Want To Have Your Own Cosmetics BrandCarlosNo ratings yet
- APCO CSAA ANS2 101 1webfinalDocument38 pagesAPCO CSAA ANS2 101 1webfinalJUAN CAMILO VALENCIA VALENCIANo ratings yet
- BITS Pilani: Scale Up and Post Approval ChangesDocument56 pagesBITS Pilani: Scale Up and Post Approval ChangesshrikantmsdNo ratings yet
- Digital Album On Prominent Social ScientistsDocument10 pagesDigital Album On Prominent Social ScientistsOliver Antony ThomasNo ratings yet
- Amy CuddyDocument5 pagesAmy CuddygeetaNo ratings yet
- Mindfulness For Two An Acceptance and Commitment TDocument5 pagesMindfulness For Two An Acceptance and Commitment TNilton SantosNo ratings yet
- Internship Report PDFDocument11 pagesInternship Report PDFASWIN KUMARNo ratings yet
- Nature'S Numbers: - BasicbooksDocument39 pagesNature'S Numbers: - Basicbooksyeol pacisNo ratings yet
- Modul MarketingDocument5 pagesModul MarketingDeni IrvandaNo ratings yet
- 14 ComputoDocument549 pages14 ComputoEver Henry FloresNo ratings yet
- International Journal of Agricultural ExtensionDocument6 pagesInternational Journal of Agricultural Extensionacasushi ginzagaNo ratings yet
- Introduction To Game Theory: Analysis of GamesDocument13 pagesIntroduction To Game Theory: Analysis of GamesAoiNo ratings yet
- Wartsila O Env Multi Stage Flash EvaporatorsDocument2 pagesWartsila O Env Multi Stage Flash EvaporatorsRichard Periyanayagam0% (1)
- Solutions Tutorial 6Document9 pagesSolutions Tutorial 6Nur Aqilah Abdullah HashimNo ratings yet
- Soundtrack: Aden LeeDocument7 pagesSoundtrack: Aden Lee이성진No ratings yet
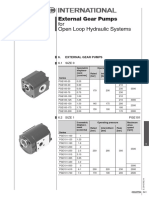
- External Gear Pumps For Open Loop Hydraulic SystemsDocument2 pagesExternal Gear Pumps For Open Loop Hydraulic SystemsBlashko GjorgjievNo ratings yet
- Stylus - Pro - 4400 201 300 (067 100)Document34 pagesStylus - Pro - 4400 201 300 (067 100)Joso CepuranNo ratings yet
- CSE 473 Pattern Recognition: Instructor: Dr. Md. Monirul IslamDocument57 pagesCSE 473 Pattern Recognition: Instructor: Dr. Md. Monirul IslamNadia Anjum100% (1)
- Refraction Experiment-PekaDocument8 pagesRefraction Experiment-PekaA. Suhaimi100% (3)
- EV METER - EV1 and EV3Document2 pagesEV METER - EV1 and EV3Nguyen DucNo ratings yet
- EE 720 - HW Set 3 - 1Document2 pagesEE 720 - HW Set 3 - 1Abdullah AL-RazemNo ratings yet
- De Thi Khao Sat HSG 12 Mon Tieng AnhDocument8 pagesDe Thi Khao Sat HSG 12 Mon Tieng AnhbuitinhNo ratings yet
- Esinex: R Resinated Lignite Is Designed ToDocument2 pagesEsinex: R Resinated Lignite Is Designed ToWaleed Barakat MariaNo ratings yet
- Gerrard 1966Document13 pagesGerrard 1966AnandhuMANo ratings yet