You might also like
- أساسيات أوتوكاد 2020 - Autocad 2020Document588 pagesأساسيات أوتوكاد 2020 - Autocad 2020محمد الحصينNo ratings yet
- كورس ماتلاب بالعربيDocument160 pagesكورس ماتلاب بالعربيHanin Bzizi100% (2)
- تعلم BlenderDocument52 pagesتعلم BlenderUgH4Rew100% (4)
- Simply Arduino - 9-10-2012Document187 pagesSimply Arduino - 9-10-2012fawziaenjeem7095No ratings yet
- معمل الأردوينوDocument29 pagesمعمل الأردوينوsamsoum1No ratings yet
- برمجة روبوت EV3Document6 pagesبرمجة روبوت EV3ssaa4ever0% (1)
- برمجة روبوت EV3Document6 pagesبرمجة روبوت EV3ssaa4ever0% (1)
- الفيجوال بيسك,كيفة البرمجة به,وكيف نحترف فيه بالامثلةDocument22 pagesالفيجوال بيسك,كيفة البرمجة به,وكيف نحترف فيه بالامثلةأكبر مكتبة كتب عربيةNo ratings yet
- دليل مسابقات الروبوت 2018 2019 PDFDocument17 pagesدليل مسابقات الروبوت 2018 2019 PDFssaa4ever100% (1)
- دليل مسابقات الروبوت 2018 2019 PDFDocument17 pagesدليل مسابقات الروبوت 2018 2019 PDFssaa4ever100% (1)
- Wedo 2.0Document9 pagesWedo 2.0amirrsaadiiNo ratings yet
- ملف دورة تدريب مدربينDocument36 pagesملف دورة تدريب مدربينAmine KordaraNo ratings yet
- MbotfinalDocument148 pagesMbotfinalamine mamacheNo ratings yet
- 02-تهديدات الشبكةDocument37 pages02-تهديدات الشبكةojaym alojaymNo ratings yet
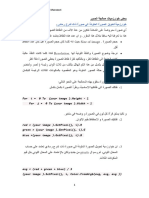
- بعض خوارزميات معالجة الصورDocument5 pagesبعض خوارزميات معالجة الصورMoneer AliNo ratings yet
- - تعاليم الاردوينوDocument132 pages- تعاليم الاردوينوazerty qertyNo ratings yet
- المحاضرة الثالثه لمادة تقنية الوسائطDocument10 pagesالمحاضرة الثالثه لمادة تقنية الوسائطTaHa AlfaytouriNo ratings yet
- أوبنتو ببساطة - ابدأ مع أوبنتو لينُكس الآن!Document182 pagesأوبنتو ببساطة - ابدأ مع أوبنتو لينُكس الآن!Ahmed M. AbouZaid100% (3)
- منهج الروبوت الآلي PDFDocument109 pagesمنهج الروبوت الآلي PDFSherif Mansour YahiaNo ratings yet
- صناعة وبرمجة الروبوت - مسودة رقم 1Document81 pagesصناعة وبرمجة الروبوت - مسودة رقم 1AhmedNo ratings yet
- شرح برنامج سويت هوم PDFDocument54 pagesشرح برنامج سويت هوم PDFdanyNo ratings yet
- Ev3RedSoft NewDocument88 pagesEv3RedSoft NewHayat alsulamiNo ratings yet
- 6- مقدمة عن البرمجةDocument7 pages6- مقدمة عن البرمجةاحمد العطارNo ratings yet
- ورقة العمل الثالثة ev3سوموDocument18 pagesورقة العمل الثالثة ev3سوموssaa4ever100% (1)
- مستشعر اللون- تتبع الخطDocument12 pagesمستشعر اللون- تتبع الخطssaa4ever67% (3)
- ورقة العمل الثانية تتبع الخطDocument13 pagesورقة العمل الثانية تتبع الخطssaa4ever100% (1)
- ورقة العمل الأولى تحريك الروبوتDocument18 pagesورقة العمل الأولى تحريك الروبوتssaa4ever100% (1)
- ev3 بلوتوثDocument10 pagesev3 بلوتوثssaa4ever100% (1)
- دليل مسابقات الروبوت 2018 2019Document9 pagesدليل مسابقات الروبوت 2018 2019ssaa4everNo ratings yet
- שיעורים 1-7בערביתDocument40 pagesשיעורים 1-7בערביתapi-27174321100% (2)
- نموذج امتحان تجريبي تكنولوجيا توجيهي 2018 نظري (مديريه الخليل)Document5 pagesنموذج امتحان تجريبي تكنولوجيا توجيهي 2018 نظري (مديريه الخليل)jamal3732792No ratings yet
- الرسم بالحاسوب PDFDocument6 pagesالرسم بالحاسوب PDFاباالفضل رائدNo ratings yet
- Graphics (OpenGL) Session 1Document6 pagesGraphics (OpenGL) Session 1Abdulrhman AlfattalNo ratings yet
- 01- مقدمةDocument11 pages01- مقدمةABDLANASSER ALARAJNo ratings yet
- Site Under Attak PDFDocument259 pagesSite Under Attak PDFSultan AlkhaldiNo ratings yet
- رسومات الحاسوبDocument3 pagesرسومات الحاسوبmoh_te100% (1)
- منهجية الشلال في تطوير البرمجيات Waterfall Methodology - e3arabi - إي عربيDocument10 pagesمنهجية الشلال في تطوير البرمجيات Waterfall Methodology - e3arabi - إي عربيRanda AhmedNo ratings yet
- Dac98b39 d817 4eb8 b944 90a4230eb6df - البرمجة بلغة سيDocument409 pagesDac98b39 d817 4eb8 b944 90a4230eb6df - البرمجة بلغة سيfatmatlili441No ratings yet
- محاضرة في لغة الأسمبليDocument17 pagesمحاضرة في لغة الأسمبليأكبر مكتبة كتب عربيةNo ratings yet
- وحدة المعالجة المركزيةDocument28 pagesوحدة المعالجة المركزيةyayaNo ratings yet
- Bouzaouia Aissa Logiciel LarpDocument117 pagesBouzaouia Aissa Logiciel LarpIronHichamNo ratings yet
- Learn Oracle ADFDocument84 pagesLearn Oracle ADFAmr FreedomNo ratings yet
- كتاب خطوة بخطوة للبرمجة بلغة سي وسي بلاس 2016Document338 pagesكتاب خطوة بخطوة للبرمجة بلغة سي وسي بلاس 2016SabahTrentinNo ratings yet
- درس تجميع الحاسوبDocument4 pagesدرس تجميع الحاسوبsamnoua34No ratings yet
- The Major Secrets of ProgrammingDocument208 pagesThe Major Secrets of ProgrammingAnonymous ZgxPZ4FBbR50% (2)
- مبادئ تعلم البرمجةDocument6 pagesمبادئ تعلم البرمجةspeakerx00No ratings yet
- Kourassat Prof Oukka 3eme 2020 Ar FinalDocument45 pagesKourassat Prof Oukka 3eme 2020 Ar Finalgassoumi walidNo ratings yet
- خوارزميات 01 PDFDocument5 pagesخوارزميات 01 PDFGhaith KhaznehNo ratings yet
- المايكروية ملزمة العملي الجزء الاولDocument13 pagesالمايكروية ملزمة العملي الجزء الاولكرار عدنان خلفNo ratings yet
- bnr21907 1Document33 pagesbnr21907 1أميرة جمالNo ratings yet
- الكتيب (محتوى نظري فقط)Document38 pagesالكتيب (محتوى نظري فقط)Amina HadjiNo ratings yet
- الطريق السهل لاحتراف البرمجة بلغة c++ PDFDocument97 pagesالطريق السهل لاحتراف البرمجة بلغة c++ PDFabuobidaNo ratings yet
- بيئة التطوير المتكاملة للأردوينو Arduino IDEDocument12 pagesبيئة التطوير المتكاملة للأردوينو Arduino IDEmustafa alazhreNo ratings yet
- خطة المساق -برمجة الحاسوب 2Document5 pagesخطة المساق -برمجة الحاسوب 2Haytham Ammer MushtahaNo ratings yet
- Flutter - المهندس فيصل الاسودDocument113 pagesFlutter - المهندس فيصل الاسودBishoy HannaNo ratings yet
- معالجة الصور الرقميةDocument140 pagesمعالجة الصور الرقميةasma_abd2014No ratings yet
- 4- المحاضرة الثانيةDocument3 pages4- المحاضرة الثانيةFaroon QueenNo ratings yet
- OpnetDocument36 pagesOpnetAhmed JahaNo ratings yet
- التصميم الجرافيكي والوسائط المتعددة- المحاضرةDocument15 pagesالتصميم الجرافيكي والوسائط المتعددة- المحاضرةhprime591No ratings yet
- عمليات مختلفة في برنامج الجداول الإلكترونيةDocument31 pagesعمليات مختلفة في برنامج الجداول الإلكترونيةali BourenaneNo ratings yet
- عمليات مختلفة في برنامج الجداول الإلكترونيةDocument31 pagesعمليات مختلفة في برنامج الجداول الإلكترونيةmaamarmenni42No ratings yet
- ITE6 Instructor Materials Chapter10Document31 pagesITE6 Instructor Materials Chapter10MohamedNo ratings yet
- مستشعر اللون- تتبع الخطDocument12 pagesمستشعر اللون- تتبع الخطssaa4ever67% (3)
- ورقة العمل الثالثة ev3سوموDocument18 pagesورقة العمل الثالثة ev3سوموssaa4ever100% (1)
- دليل مسابقات الروبوت 2018 2019Document9 pagesدليل مسابقات الروبوت 2018 2019ssaa4everNo ratings yet
- التخطيط المهنيDocument8 pagesالتخطيط المهنيssaa4everNo ratings yet
- ورقة العمل الثانية تتبع الخطDocument13 pagesورقة العمل الثانية تتبع الخطssaa4ever100% (1)
- ev3 بلوتوثDocument10 pagesev3 بلوتوثssaa4ever100% (1)
- استكشاف المهن المرتبطة بتقنية المعلومات والاتصالاتDocument7 pagesاستكشاف المهن المرتبطة بتقنية المعلومات والاتصالاتssaa4everNo ratings yet
- ورقة العمل الأولى تحريك الروبوتDocument18 pagesورقة العمل الأولى تحريك الروبوتssaa4ever100% (1)
- التعرية الريحيةDocument20 pagesالتعرية الريحيةssaa4ever75% (4)
- الملف المهنيDocument8 pagesالملف المهنيssaa4everNo ratings yet
- المنظمات التخطيطية أو البصريةDocument19 pagesالمنظمات التخطيطية أو البصريةssaa4ever100% (1)
- النشر على الويبDocument15 pagesالنشر على الويبssaa4everNo ratings yet
- الخط المستقيمDocument7 pagesالخط المستقيمssaa4everNo ratings yet
- مراحل التنفيذDocument6 pagesمراحل التنفيذssaa4everNo ratings yet