You might also like
- Design and Sizing Calculation: Based On Api 521 Fourth Edition, March 1997 Horizontal Knockout Drum Data InputDocument2 pagesDesign and Sizing Calculation: Based On Api 521 Fourth Edition, March 1997 Horizontal Knockout Drum Data InputChitu Ionut Laurentiu100% (2)
- Lesson 6 Example ProblemsDocument9 pagesLesson 6 Example ProblemsOksana MandrykNo ratings yet
- A Mechanism of The Large-Scale Damping in The CMB AnisotropyDocument31 pagesA Mechanism of The Large-Scale Damping in The CMB AnisotropyFlori Rodriguez HernandezNo ratings yet
- Aerodynamic BasicsDocument124 pagesAerodynamic BasicsChanaka DilshanNo ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- Steel Chap5 Ultimate Limit StateDocument35 pagesSteel Chap5 Ultimate Limit StateMesfin Derbew86% (7)
- Advances in Critical Buckling Load Assessment For Tubular Inside WellboresDocument9 pagesAdvances in Critical Buckling Load Assessment For Tubular Inside WellboresPeaceMaker AmirahNo ratings yet
- Solution To David Tong's Problems PDFDocument22 pagesSolution To David Tong's Problems PDFCamilo DominguezNo ratings yet
- Describing Functions For Effective StiffnessDocument11 pagesDescribing Functions For Effective Stiffnessryan rakhmat setiadiNo ratings yet
- Perhitungan Struktur Baja Kuda-Kuda Baja RinganDocument76 pagesPerhitungan Struktur Baja Kuda-Kuda Baja RinganAnnisaSenjakala100% (3)
- Abaqus Convergence DiscussionDocument21 pagesAbaqus Convergence DiscussionBolarinwaNo ratings yet
- Design Method For RC Building Structure Controlled by Elasto-Plastic Dampers Using Performance CurveDocument10 pagesDesign Method For RC Building Structure Controlled by Elasto-Plastic Dampers Using Performance Curvefernando CanizaresNo ratings yet
- Theoretical Study of Laser Heating and Dissociation Reactions in Solids Using Ultrafast Timeresolved Xray DiffractionDocument6 pagesTheoretical Study of Laser Heating and Dissociation Reactions in Solids Using Ultrafast Timeresolved Xray DiffractionSuresh KhangembamNo ratings yet
- A Thermo Electro Hydrodynamic Model For Vobration Electrospinning ProcessDocument6 pagesA Thermo Electro Hydrodynamic Model For Vobration Electrospinning ProcessIVANNo ratings yet
- Extension of Group Theory To Reactors of Multiple Regions One Energy GroupDocument9 pagesExtension of Group Theory To Reactors of Multiple Regions One Energy GroupmsakowskNo ratings yet
- Experiment Name: Wind Modeling Analysis. ObjectiveDocument3 pagesExperiment Name: Wind Modeling Analysis. Objectivekoushik rajakNo ratings yet
- Comment On 2021 AnandADocument6 pagesComment On 2021 AnandAfabioggbNo ratings yet
- Eq Eng New Questions OldDocument28 pagesEq Eng New Questions Oldusmanshahbaz0197No ratings yet
- Analysis and Modeling of Coplanar Strip Line PDFDocument38 pagesAnalysis and Modeling of Coplanar Strip Line PDFRajbala SolankiNo ratings yet
- Rosenzweig 1994 0501Document14 pagesRosenzweig 1994 0501Particle Beam Physics LabNo ratings yet
- SDOF Model: Non-Periodic Excitation MDOF ModelsDocument3 pagesSDOF Model: Non-Periodic Excitation MDOF Modelssayan mukherjeeNo ratings yet
- Azzouz I 2005Document6 pagesAzzouz I 2005Leonardo SicchieriNo ratings yet
- Modeling and Optimization of Piezoelectric Energy HarvestingDocument12 pagesModeling and Optimization of Piezoelectric Energy HarvestingadeijNo ratings yet
- Design of A Standing-Wave Thermoacoustic Engine: Catherine Gardner and Chris LawnDocument8 pagesDesign of A Standing-Wave Thermoacoustic Engine: Catherine Gardner and Chris LawnsaedeNo ratings yet
- TUPMN038Document3 pagesTUPMN038Particle Beam Physics LabNo ratings yet
- A Study of Magnetic ViscosityDocument12 pagesA Study of Magnetic ViscositySantiago BNo ratings yet
- Adaptive Adjustment of Noise Covariance in Kalman Filter For Dynamic State EstimationDocument5 pagesAdaptive Adjustment of Noise Covariance in Kalman Filter For Dynamic State EstimationPrakrit TyagiNo ratings yet
- FLW by BoukampDocument10 pagesFLW by BoukampaalexgNo ratings yet
- Structural Studies of Decaying Fluid Turbulence: Effect of Initial ConditionsDocument9 pagesStructural Studies of Decaying Fluid Turbulence: Effect of Initial ConditionssolvenseNo ratings yet
- Spring K MassDocument4 pagesSpring K MasshamedNo ratings yet
- Precision Pins Down The Electron's Magnetism: Gerald Gabrielse David HannekeDocument3 pagesPrecision Pins Down The Electron's Magnetism: Gerald Gabrielse David HannekeZephir AWTNo ratings yet
- I R ResponseDocument5 pagesI R ResponseRicardo Villagómez TamezNo ratings yet
- 2005, Wijskamp, Akkerman, Spring-Forward in Composite Plate ElementsDocument4 pages2005, Wijskamp, Akkerman, Spring-Forward in Composite Plate Elementshalil yıldırımNo ratings yet
- GR ProblemDocument19 pagesGR ProblemQUAH KAH CHUN UPSINo ratings yet
- Review Article ReportDocument7 pagesReview Article ReportTanu ChoudharyNo ratings yet
- Carrier Capture Cross Sections of Traps by DltsDocument7 pagesCarrier Capture Cross Sections of Traps by Dltsdevendratiwari0No ratings yet
- Conte OpenSees Snopt A Framework For Finite Element Based Optimization 26oct2012 FinalDocument24 pagesConte OpenSees Snopt A Framework For Finite Element Based Optimization 26oct2012 Finalgreenday3No ratings yet
- High Field Transport in Semiconductors. The Drifted Maxwellian Approach. I. General TheoryDocument12 pagesHigh Field Transport in Semiconductors. The Drifted Maxwellian Approach. I. General Theorysh0001No ratings yet
- Thermoelectric: The BestDocument4 pagesThermoelectric: The BestpiposatNo ratings yet
- 2023 OPhO TheoryDocument10 pages2023 OPhO TheoryNguyễn Trần Minh TríNo ratings yet
- Damping of Slow Magnetoacoustic Waves in An Inhomogeneous Coronal PlasmaDocument6 pagesDamping of Slow Magnetoacoustic Waves in An Inhomogeneous Coronal Plasmaplasma_2003No ratings yet
- Cinco Casos de Control DigitalDocument107 pagesCinco Casos de Control DigitalCamilo NuñezNo ratings yet
- Questions 11Document7 pagesQuestions 11Thiago SantosNo ratings yet
- Canada PapersDocument11 pagesCanada PapersAdriana Daniela SanduNo ratings yet
- Push OverDocument9 pagesPush OverHnin Hnin HlaingNo ratings yet
- S.D.Jang J Korean Phys Soc V.49 p309 December 2006Document5 pagesS.D.Jang J Korean Phys Soc V.49 p309 December 2006Dinesh PerumalsamyNo ratings yet
- 22.05 Reactor Physics - Part Thirteen: Criticality ConditionsDocument9 pages22.05 Reactor Physics - Part Thirteen: Criticality ConditionsmsakowskNo ratings yet
- Parameter Extraction and Support-Loss in MEMS Resonators: Abstract: in This Paper It Is Shown How The EquivalentDocument6 pagesParameter Extraction and Support-Loss in MEMS Resonators: Abstract: in This Paper It Is Shown How The EquivalentVoet ZoekerNo ratings yet
- Aspects Of: P-Wave SuperconductivityDocument9 pagesAspects Of: P-Wave SuperconductivityJahan ClaesNo ratings yet
- Damping of Materials and Members in StructuresDocument16 pagesDamping of Materials and Members in StructuresD Toño Toro100% (1)
- Nozzle Velocity & PerformanceDocument17 pagesNozzle Velocity & PerformanceD.Viswanath100% (3)
- Optimal PID DesignDocument5 pagesOptimal PID Designmousa bagherpourjahromiNo ratings yet
- Terebilo 1998 0399Document5 pagesTerebilo 1998 0399Particle Beam Physics LabNo ratings yet
- American Mathematical Society Journal of The American Mathematical SocietyDocument8 pagesAmerican Mathematical Society Journal of The American Mathematical Societychandan mondalNo ratings yet
- Quadric Resistive Sheet Profile For Wideband Antennas: 2. Mathematical ConsiderationsDocument6 pagesQuadric Resistive Sheet Profile For Wideband Antennas: 2. Mathematical Considerationsachmad_zunaidiNo ratings yet
- A Study On Energy Dissipating Behaviors and Response Prediction of RC Structures With Viscous Dampers Subjected To EarthquakesDocument11 pagesA Study On Energy Dissipating Behaviors and Response Prediction of RC Structures With Viscous Dampers Subjected To EarthquakesAbel Carazas CovinosNo ratings yet
- Pair Production BrezinDocument9 pagesPair Production Brezin11111__11__1111No ratings yet
- Capacity Spectra For Lead Rubber Bearing Capacity Spectra For Lead Rubber Bearing Seismic Isolation SystemsDocument8 pagesCapacity Spectra For Lead Rubber Bearing Capacity Spectra For Lead Rubber Bearing Seismic Isolation SystemsDoby KamburovaNo ratings yet
- BandMT 05Document7 pagesBandMT 05Jorden SeniorNo ratings yet
- CAPE2024 Assignment3Document2 pagesCAPE2024 Assignment3Vedant SharmaNo ratings yet
- Mag-Dipole DriveDocument48 pagesMag-Dipole DrivejohnthabaptistNo ratings yet
- Problem Set 6 SolutionDocument4 pagesProblem Set 6 SolutionRod De GuzmanNo ratings yet
- PChemCh7 20110222 PDFDocument144 pagesPChemCh7 20110222 PDFLAVTOLNo ratings yet
- Kittel4 4Document3 pagesKittel4 4Gilberto PereiraNo ratings yet
- Fuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitDocument5 pagesFuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitwilliamNo ratings yet
- Smart Materials and Structures: International WorkshopDocument10 pagesSmart Materials and Structures: International WorkshopDavid CristhianNo ratings yet
- Use of Green's Function Approach For SAW Fdter CAD System de Vel Opmen TDocument6 pagesUse of Green's Function Approach For SAW Fdter CAD System de Vel Opmen TSoumitra BhowmickNo ratings yet
- Easy Round (2015)Document4 pagesEasy Round (2015)Camille LeiNo ratings yet
- PROBLEM 4.156: SolutionDocument11 pagesPROBLEM 4.156: SolutionYennifer OrtegozaNo ratings yet
- SPE/IADC-190008-MS Advancing The Mud Gas Separator Sizing Calculation: The MPD PerspectiveDocument11 pagesSPE/IADC-190008-MS Advancing The Mud Gas Separator Sizing Calculation: The MPD PerspectiveDiego AraqueNo ratings yet
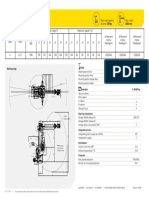
- M-900 Robot Working Range: 330 KG 3203 MMDocument1 pageM-900 Robot Working Range: 330 KG 3203 MMjosjcrsNo ratings yet
- General Physics 1: Activity Title: What Forces You? Activity No.: 1.3 Learning Competency: Draw Free-Body DiagramsDocument5 pagesGeneral Physics 1: Activity Title: What Forces You? Activity No.: 1.3 Learning Competency: Draw Free-Body DiagramsLeonardo PigaNo ratings yet
- Physics As Book AnswersDocument18 pagesPhysics As Book AnswersSadat Sadman Saad100% (4)
- LG - PSHSCVC - Grade10 - Physics2 - Potential DifferenceDocument8 pagesLG - PSHSCVC - Grade10 - Physics2 - Potential DifferenceqwertyNo ratings yet
- Calculation of Bulk Modulus Shear Modulus and Poisson S Ratio of Glass 1975 Journal of Non Crystalline SolidsDocument11 pagesCalculation of Bulk Modulus Shear Modulus and Poisson S Ratio of Glass 1975 Journal of Non Crystalline SolidsGarlapati Srinivasa RaoNo ratings yet
- CE 407 Earthquake Engineering 2019Document20 pagesCE 407 Earthquake Engineering 2019Andrea MagtutoNo ratings yet
- Subject Code Exam Date Q Id Questions Answer KeyDocument16 pagesSubject Code Exam Date Q Id Questions Answer KeyGowtham RajagopalNo ratings yet
- 2007 - Study On Optical Polishing of Optical Glass by Means of Ultrasonic Magnetorheological Compound FinishingDocument5 pages2007 - Study On Optical Polishing of Optical Glass by Means of Ultrasonic Magnetorheological Compound FinishingMayank Rajesh Kumar ShrivastavaNo ratings yet
- 6.1 Angles & Their MeasureDocument6 pages6.1 Angles & Their MeasureMiles BaldersNo ratings yet
- Boat andDocument7 pagesBoat andAnonymous EvbW4o1U7No ratings yet
- Creep (Deformation) PDFDocument13 pagesCreep (Deformation) PDFAdamRaczNo ratings yet
- 3c-Torque MC Practice Problems-ANSWERSDocument4 pages3c-Torque MC Practice Problems-ANSWERSruuki25No ratings yet
- A Straight-Bladed Variable-Pitch VAWT Concept For Improved Power GenerationDocument9 pagesA Straight-Bladed Variable-Pitch VAWT Concept For Improved Power GenerationMostafa RashedNo ratings yet
- Compression Memeber NumericalDocument6 pagesCompression Memeber NumericalDeepak SahNo ratings yet
- Reynolds EqnDocument27 pagesReynolds EqnSuman KhanalNo ratings yet
- FlywheelDocument24 pagesFlywheelDivye SethiNo ratings yet
- FEA Assignment No 1 Shivaji UniversityDocument8 pagesFEA Assignment No 1 Shivaji Universityashutosh khanvilkarNo ratings yet
- Fa1 RCCDocument3 pagesFa1 RCCSavage BoiiiNo ratings yet
- Lecture 5 Boundary Layer Theory 4 PDFDocument16 pagesLecture 5 Boundary Layer Theory 4 PDFpraveen natucalNo ratings yet