You might also like
- Practical Numerical C Programming: Finance, Engineering, and Physics ApplicationsFrom EverandPractical Numerical C Programming: Finance, Engineering, and Physics ApplicationsNo ratings yet
- Finite-Burn Trans-Lunar Trajectory OptimizationDocument53 pagesFinite-Burn Trans-Lunar Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- A Computer Program For Interplanetary Gravity-Assist Trajectory Design and Optimization (Fortran)Document20 pagesA Computer Program For Interplanetary Gravity-Assist Trajectory Design and Optimization (Fortran)Anonymous REw1YIq4q7No ratings yet
- Continuous Low-Thrust LEO-to-GEO Trajectory OptimizationDocument27 pagesContinuous Low-Thrust LEO-to-GEO Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
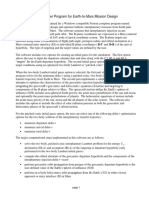
- Earth-to-Mars Mission Design (Fortran)Document50 pagesEarth-to-Mars Mission Design (Fortran)Anonymous REw1YIq4q7No ratings yet
- A MATLAB Script For Creating Pork Chop Plots of Ballistic Earth-to-Mars TrajectoriesDocument15 pagesA MATLAB Script For Creating Pork Chop Plots of Ballistic Earth-to-Mars TrajectoriesAnonymous REw1YIq4q7No ratings yet
- Computer Methods For Orbit TransferDocument344 pagesComputer Methods For Orbit TransferAnonymous REw1YIq4q7No ratings yet
- Lunar Ascent Trajectory OptimizationDocument30 pagesLunar Ascent Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- Computer Methods For Aerospace Trajectory OptimizationDocument468 pagesComputer Methods For Aerospace Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- A MATLAB Script For Propagating Trajectories From The Earth To The MoonDocument33 pagesA MATLAB Script For Propagating Trajectories From The Earth To The MoonAnonymous REw1YIq4q7No ratings yet
- Computer Methods For Lunar Mission AnalysisDocument422 pagesComputer Methods For Lunar Mission AnalysisAnonymous REw1YIq4q7No ratings yet
- Atmospheric Reentry Trajectory OptimizationDocument30 pagesAtmospheric Reentry Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- Stomp Rocket Lab 2013-07-11Document4 pagesStomp Rocket Lab 2013-07-11sk112No ratings yet
- Visteon PaperDocument23 pagesVisteon Paperramanareddygv100% (1)
- A Computer Program For Parametric Analysis of Ballistic Earth To Mars TrajectoriesDocument17 pagesA Computer Program For Parametric Analysis of Ballistic Earth To Mars TrajectoriesAnonymous REw1YIq4q7No ratings yet
- Capstone Project Overview: Bureau of Transportation StatisticsDocument7 pagesCapstone Project Overview: Bureau of Transportation StatisticsKaranja KinyanjuiNo ratings yet
- Program ROCKET A Computer Program For Predicting and Optimizing Single Stage Rocket PerformanceDocument9 pagesProgram ROCKET A Computer Program For Predicting and Optimizing Single Stage Rocket PerformanceStalin PatanNo ratings yet
- Projecoes Cartograficas PDFDocument68 pagesProjecoes Cartograficas PDFMarcos FávaroNo ratings yet
- Assignment 4Document3 pagesAssignment 4Xiaohan DuNo ratings yet
- Assignmt 1Document9 pagesAssignmt 1lawac3No ratings yet
- Code FightDocument10 pagesCode FightManeesh DarisiNo ratings yet
- Chapter 2 Lab Exercises: Data ExpressionsDocument27 pagesChapter 2 Lab Exercises: Data ExpressionsdesireeibonNo ratings yet
- 2008 Computer Science Free ResponseDocument15 pages2008 Computer Science Free ResponseAndrew ChenNo ratings yet
- Week 3 - Numerical Data and Expression Part 1Document79 pagesWeek 3 - Numerical Data and Expression Part 1Tantan YiNo ratings yet
- JPL Horizons On-Line Ephemeris SystemDocument59 pagesJPL Horizons On-Line Ephemeris SystemSilivanNo ratings yet
- User Manual For ALLCPTDocument46 pagesUser Manual For ALLCPTmyplaxisNo ratings yet
- Statistical Machine Learning: Assignment 03Document7 pagesStatistical Machine Learning: Assignment 03Ericsson MarinNo ratings yet
- Manual 5 - Input, Output Function, Variables & DatatypesDocument11 pagesManual 5 - Input, Output Function, Variables & Datatypesshayanalisafdar65No ratings yet
- Ushtrime JavaDocument29 pagesUshtrime JavafatiNo ratings yet
- Lab 6 - ArrayDocument3 pagesLab 6 - ArrayNawaf AlshareefNo ratings yet
- Planet Orbits in PythonDocument7 pagesPlanet Orbits in PythonAlankarDuttaNo ratings yet
- Project Spring2023 Eng FINAL SVDocument4 pagesProject Spring2023 Eng FINAL SVnhan trầnNo ratings yet
- Rapid theory exploration of aviation task using cognitive modeling toolDocument5 pagesRapid theory exploration of aviation task using cognitive modeling toolTJMarioNo ratings yet
- CE740 (3 0 1 8) - Traffic Engineering Home WorkDocument2 pagesCE740 (3 0 1 8) - Traffic Engineering Home WorkSuman.SNo ratings yet
- Python PRDocument4 pagesPython PRits4krishna3776No ratings yet
- Chapter 2: Objects and Primitive Data: SolutionsDocument13 pagesChapter 2: Objects and Primitive Data: SolutionsEric Martin100% (1)
- Rosendo TSA4Document13 pagesRosendo TSA4Sean RosendoNo ratings yet
- EET207 Signals & Systems Assignment 1Document14 pagesEET207 Signals & Systems Assignment 1Lee Boon HongNo ratings yet
- RailwayDocument29 pagesRailwayDivyansh PathakNo ratings yet
- Data and ExpressionsDocument27 pagesData and ExpressionsSuki LoNo ratings yet
- GMSH Tutorial 1Document2 pagesGMSH Tutorial 1Claudio De ContiNo ratings yet
- Bode V 2.31 SG: by Thomas ReitmayrDocument16 pagesBode V 2.31 SG: by Thomas ReitmayrFrank ParkerNo ratings yet
- Convert Excel data to KML for mapsDocument10 pagesConvert Excel data to KML for mapsENRIQUENo ratings yet
- Detran User ManualDocument6 pagesDetran User ManualmansuralijisanNo ratings yet
- G3LUH - PLAN-13 Satellite Position CalculationDocument11 pagesG3LUH - PLAN-13 Satellite Position CalculationScott HatherNo ratings yet
- FullProf User's GuideDocument76 pagesFullProf User's GuideEmma LoydNo ratings yet
- Week2-Data and ExpressionsDocument75 pagesWeek2-Data and ExpressionsBatuhan OrkunNo ratings yet
- Spatial Econometrics With R 2020Document141 pagesSpatial Econometrics With R 2020Raquel Vargas CorreaNo ratings yet
- PythonTutorial MCSC 202Document39 pagesPythonTutorial MCSC 202BinoNo ratings yet
- Faster Sin and Cosine Through Lookup TablesDocument15 pagesFaster Sin and Cosine Through Lookup TablesdipatelNo ratings yet
- Scpa TP Rules Import TemplateDocument20 pagesScpa TP Rules Import TemplategokulNo ratings yet
- Chapter3-Numerical Data and Expression (Part 2)Document20 pagesChapter3-Numerical Data and Expression (Part 2)Aziemah HaidahNo ratings yet
- R GettingstartedDocument7 pagesR GettingstartedChandra Prakash KhatriNo ratings yet
- cl1 AerDocument4 pagescl1 AerrafallaferNo ratings yet
- The Linux USB Input Subsystem, Part I - Brad Hards - LINUX JournalDocument4 pagesThe Linux USB Input Subsystem, Part I - Brad Hards - LINUX JournalTechnical NoviceNo ratings yet
- Asen5090 Expected Range UpdatedDocument3 pagesAsen5090 Expected Range UpdatedPatrick SibandaNo ratings yet
- Module 1 & 2Document4 pagesModule 1 & 2espiritufatimahareejvillanuevaNo ratings yet
- MaxDEA LP ManualDocument39 pagesMaxDEA LP ManualBharath Vignesh100% (1)
- Assignment UserDefinedFunctionsDocument6 pagesAssignment UserDefinedFunctionsraytonli nNo ratings yet
- Computer Methods For Aerospace Trajectory OptimizationDocument468 pagesComputer Methods For Aerospace Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- Computer Methods For TransEarth TCM Delta-V Design and OptimizationDocument12 pagesComputer Methods For TransEarth TCM Delta-V Design and OptimizationAnonymous REw1YIq4q7No ratings yet
- Selenocentric Coordinates and TransformationsDocument9 pagesSelenocentric Coordinates and TransformationsAnonymous REw1YIq4q7No ratings yet
- Computer Methods For Lunar Mission AnalysisDocument422 pagesComputer Methods For Lunar Mission AnalysisAnonymous REw1YIq4q7No ratings yet
- Computer Methods For Orbit TransferDocument344 pagesComputer Methods For Orbit TransferAnonymous REw1YIq4q7No ratings yet
- Lunar Mission AnalysisDocument270 pagesLunar Mission AnalysisAnonymous REw1YIq4q7No ratings yet
- Orbit Theory and ApplicationDocument246 pagesOrbit Theory and ApplicationPeacefulLionNo ratings yet
- Finite-Burn, Earth Orbit Rendezvous Trajectory OptimizationDocument30 pagesFinite-Burn, Earth Orbit Rendezvous Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- The Gravity Perturbed Hohmann TransferDocument27 pagesThe Gravity Perturbed Hohmann TransferAnonymous REw1YIq4q7No ratings yet
- A MATLAB Script For Propagating Interplanetary Trajectories From Earth To MarsDocument36 pagesA MATLAB Script For Propagating Interplanetary Trajectories From Earth To MarsAnonymous REw1YIq4q7No ratings yet
- Low-Thrust Interplanetary Trajectory OptimizationDocument52 pagesLow-Thrust Interplanetary Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- A MATLAB Script For Propagating Trajectories From The Earth To The MoonDocument33 pagesA MATLAB Script For Propagating Trajectories From The Earth To The MoonAnonymous REw1YIq4q7No ratings yet
- Pre-Flight Interplanetary Mission AnalysisDocument56 pagesPre-Flight Interplanetary Mission AnalysisAnonymous REw1YIq4q7No ratings yet
- Atmospheric Reentry Trajectory OptimizationDocument30 pagesAtmospheric Reentry Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- A Computer Program For Parametric Analysis of Ballistic Earth To Mars TrajectoriesDocument17 pagesA Computer Program For Parametric Analysis of Ballistic Earth To Mars TrajectoriesAnonymous REw1YIq4q7No ratings yet
- Creating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Document23 pagesCreating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Anonymous REw1YIq4q7No ratings yet
- Two Maneuver, Finite-Burn Trajectory OptimizationDocument35 pagesTwo Maneuver, Finite-Burn Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- A Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Document10 pagesA Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Anonymous REw1YIq4q7No ratings yet
- The Gravity Perturbed Hohmann TransferDocument24 pagesThe Gravity Perturbed Hohmann TransferAnonymous REw1YIq4q7No ratings yet
- A Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Document32 pagesA Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Anonymous REw1YIq4q7No ratings yet
- Lunar Ascent Trajectory OptimizationDocument30 pagesLunar Ascent Trajectory OptimizationAnonymous REw1YIq4q7No ratings yet
- Targeting With Modified Equinoctial Orbital ElementsDocument4 pagesTargeting With Modified Equinoctial Orbital ElementsAnonymous REw1YIq4q7No ratings yet
- Generalized Linear Targeting and GuidanceDocument11 pagesGeneralized Linear Targeting and GuidanceAnonymous REw1YIq4q7No ratings yet
- A Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Document10 pagesA Computer Program For Designing Interplanetary Injection Trajectories (MATLAB)Anonymous REw1YIq4q7No ratings yet
- Two-Body Partial DerivativesDocument6 pagesTwo-Body Partial DerivativesAnonymous REw1YIq4q7No ratings yet
- Creating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Document23 pagesCreating Pork Chop Plots of Ballistic Earth-to-Mars Trajectories (Fortran)Anonymous REw1YIq4q7No ratings yet
- A Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Document32 pagesA Computer Program For Patched-Conic, Ballistic Interplanetary Trajectory Design and Optimization (Fortran)Anonymous REw1YIq4q7No ratings yet
- Optimal Finite-Burn Earth Orbit-to-Interplanetary InjectionDocument46 pagesOptimal Finite-Burn Earth Orbit-to-Interplanetary InjectionAnonymous REw1YIq4q7No ratings yet
- Introduction To NumpyDocument41 pagesIntroduction To NumpyRam PrasadNo ratings yet
- Transmission Line4 PDFDocument46 pagesTransmission Line4 PDFRevathi PrasadNo ratings yet
- Chapter 1: Understanding Functions, Limits and GraphsDocument50 pagesChapter 1: Understanding Functions, Limits and Graphsabdul waqasNo ratings yet
- Apostila Smath StudioDocument107 pagesApostila Smath StudioRicardo RabeloNo ratings yet
- Tablas Shapiro TermodinamicaDocument99 pagesTablas Shapiro TermodinamicaJESUS MANUEL SERRANO JAMAICANo ratings yet
- Gudermann function: A definition and propertiesDocument3 pagesGudermann function: A definition and propertiesElaine MoratoNo ratings yet
- CivE 222 Course Outline - 2018SDocument8 pagesCivE 222 Course Outline - 2018SRyan LeeNo ratings yet
- TechRef Overhead Line Models PDFDocument29 pagesTechRef Overhead Line Models PDFRafat ThongNo ratings yet
- Mso Ques SLDocument10 pagesMso Ques SLsddsdsdNo ratings yet
- Mei Structured MathematicsDocument56 pagesMei Structured MathematicsMarkus1234567No ratings yet
- Table of Common Laplace TransformsDocument2 pagesTable of Common Laplace TransformsDendiNo ratings yet
- MATH 3705B Test 4 Solutions: r u r u u (r, θ) = a rDocument2 pagesMATH 3705B Test 4 Solutions: r u r u u (r, θ) = a ryana22No ratings yet
- Table of Common Laplace TransformsDocument2 pagesTable of Common Laplace TransformsRoger RogerNo ratings yet
- Guide To GamelinDocument181 pagesGuide To GamelinDonutdealer100% (1)
- 16 - Jacobian Elliptic Functions and Theta FunctionsDocument15 pages16 - Jacobian Elliptic Functions and Theta FunctionsJohnNo ratings yet
- Cambridge Natural Sciences Mathematics WorkbookDocument19 pagesCambridge Natural Sciences Mathematics WorkbooklaylaNo ratings yet
- Laplace Table PDFDocument2 pagesLaplace Table PDFHirsh PithadiaNo ratings yet
- Signals & Systems Lab ManualDocument63 pagesSignals & Systems Lab ManualDhadrmender Nishad100% (1)
- Article by Bill RobinsonDocument25 pagesArticle by Bill RobinsonNeutronNo ratings yet
- A-Level Further Mathematics PDFDocument20 pagesA-Level Further Mathematics PDFKasparov T MhangamiNo ratings yet
- Hyperbolic Functions ExplainedDocument11 pagesHyperbolic Functions ExplainedAmiya Ranjan MalikNo ratings yet
- Theoretical Computer Science Cheat SheetDocument10 pagesTheoretical Computer Science Cheat SheetRosa GonzalezNo ratings yet
- Hicalc ManualDocument46 pagesHicalc ManualYasir ShigileeniNo ratings yet
- UEM Sol To Exerc Chap 059Document13 pagesUEM Sol To Exerc Chap 059Prototype MichaelNo ratings yet
- Ics Lab ManualDocument46 pagesIcs Lab Manualapi-247102572No ratings yet
- University of Cambridge Department of Chemical Engineering DatabookDocument40 pagesUniversity of Cambridge Department of Chemical Engineering DatabookwaterdrinkNo ratings yet
- 5.continuity and Differentiability Assignment SolutionsDocument15 pages5.continuity and Differentiability Assignment SolutionsOlagunju AbdulmalikNo ratings yet
- Diploma in Electrical Engineering C 18 SyllabusDocument89 pagesDiploma in Electrical Engineering C 18 Syllabuskiran045No ratings yet
- Brief Introduction to Green's Functions for PDEsDocument12 pagesBrief Introduction to Green's Functions for PDEsDilara ÇınarelNo ratings yet