You might also like
- Symmetrical FaultsDocument9 pagesSymmetrical FaultsManish Kumar BhardwajNo ratings yet
- NICE3000 电梯一体化控制器用户手册 (英文详版) - V1.0 PDFDocument232 pagesNICE3000 电梯一体化控制器用户手册 (英文详版) - V1.0 PDFAsdrubal Fredy GutierrezNo ratings yet
- Calculation For Short Circuit Current Calculation Using IEC IEEE Standard PDFDocument11 pagesCalculation For Short Circuit Current Calculation Using IEC IEEE Standard PDFMaktoob M Knif100% (1)
- Static FC/TCR CompensatorDocument36 pagesStatic FC/TCR CompensatorHans De Keulenaer100% (2)
- Häkan+Rörvall +harmonic+filtersDocument43 pagesHäkan+Rörvall +harmonic+filtersrezaNo ratings yet
- CH 2 Power Sys 010809Document73 pagesCH 2 Power Sys 010809hafiz azmanNo ratings yet
- Sequence Impedance in Different Power EquipmentsDocument7 pagesSequence Impedance in Different Power EquipmentsMadhusudhan Srinivasan0% (1)
- Triplex HarmonicsDocument4 pagesTriplex HarmonicsMounikaNo ratings yet
- 2 Tutorial Handouts 300Document30 pages2 Tutorial Handouts 300Cu Teo100% (1)
- The Basics of ETAP For The BeginnersDocument4 pagesThe Basics of ETAP For The Beginnersjhon MethewNo ratings yet
- Harmonics PresentationDocument22 pagesHarmonics PresentationAbraham Jyothimon0% (1)
- Fault Analysis in Transmission System Using MatlabDocument50 pagesFault Analysis in Transmission System Using MatlabSHIKHAR KHANDELWAL89% (46)
- Symmetrical Fault AnalysisDocument13 pagesSymmetrical Fault AnalysisCh. Ali GhafoorNo ratings yet
- Load Flow Analysis On IEEE 14 Bus SystemDocument7 pagesLoad Flow Analysis On IEEE 14 Bus SystemIJRASETPublicationsNo ratings yet
- ACS550 Fault TracingDocument14 pagesACS550 Fault Tracingshadi22No ratings yet
- Kenya Power Attachment ReportDocument17 pagesKenya Power Attachment ReportRouxcel abuto100% (1)
- Load Flow Analysis PDFDocument5 pagesLoad Flow Analysis PDFDhiren PrajapatiNo ratings yet
- Circuit Breaker Sizing IEEE Areva Oct 09Document20 pagesCircuit Breaker Sizing IEEE Areva Oct 09George GeorgeNo ratings yet
- Harmonic Filter Design PDFDocument14 pagesHarmonic Filter Design PDFserban_elNo ratings yet
- Improved Three-Phase Power-Flow Methods Using Sequence Components - MA Akher - KM Nor - AHA RashidDocument13 pagesImproved Three-Phase Power-Flow Methods Using Sequence Components - MA Akher - KM Nor - AHA RashidIndra AditamaNo ratings yet
- ATP EMTP InstallationDocument3 pagesATP EMTP InstallationRohan ChandrashekarNo ratings yet
- Voltage Instability ReportDocument24 pagesVoltage Instability ReportPravat Satpathy100% (1)
- PowerFactory TechRef - DFIGDocument17 pagesPowerFactory TechRef - DFIGАлександрNo ratings yet
- Power System Analysis SimulationDocument78 pagesPower System Analysis SimulationAkah PreciousNo ratings yet
- 2 Biased Differential ProtectionDocument10 pages2 Biased Differential Protectionmuaz_aminu1422100% (1)
- Power System Analysis QuestionsDocument5 pagesPower System Analysis QuestionsMusaddiq MuhammadNo ratings yet
- Over All Drawings of PMCC-5 Panel-R0Document24 pagesOver All Drawings of PMCC-5 Panel-R0GreenOlive ControlsNo ratings yet
- Short CircuitDocument30 pagesShort CircuitRa Ar100% (1)
- F/i Converter mA/V Output Analog Based 2-Wire Transmitter Head Mounting Transmitter 2-Wire Transmitter Lqʨhoghqforvxuh MODEL 6420 620S HTB230 311Document3 pagesF/i Converter mA/V Output Analog Based 2-Wire Transmitter Head Mounting Transmitter 2-Wire Transmitter Lqʨhoghqforvxuh MODEL 6420 620S HTB230 311azkalNo ratings yet
- PSS Lab Exp Edited PDFDocument122 pagesPSS Lab Exp Edited PDFKeith BoltonNo ratings yet
- Protective Relay Training CoursesDocument5 pagesProtective Relay Training CoursesdenramrNo ratings yet
- PowerWorld Transmission Line Parameter Calculator - TransLineCalcHelp1Document17 pagesPowerWorld Transmission Line Parameter Calculator - TransLineCalcHelp1Suresh UmadiNo ratings yet
- Basic Line ProtectionDocument30 pagesBasic Line ProtectionMaduike Obinna HenryNo ratings yet
- FusesDocument34 pagesFusesMohd Arjhit AliNo ratings yet
- Tle/Epas: Quarter 1 - Module 2Document27 pagesTle/Epas: Quarter 1 - Module 2Doone Heart Santander Cabuguas83% (6)
- IegcDocument42 pagesIegcUPES IFMPMNo ratings yet
- Integration of Green and Renewable Energy in Electric Power SystemsFrom EverandIntegration of Green and Renewable Energy in Electric Power SystemsNo ratings yet
- Modelling of Substation Grounding Grids: A. El-Morshedy, PH.D., A.G Zeitoun, PH.D., and M.M. GhourabDocument6 pagesModelling of Substation Grounding Grids: A. El-Morshedy, PH.D., A.G Zeitoun, PH.D., and M.M. GhouraboscarNo ratings yet
- Fault AnalysisDocument37 pagesFault Analysisavinash_sinha20100% (2)
- EE - 453 Power Quality and Harmonics: Harmonic MitigationDocument88 pagesEE - 453 Power Quality and Harmonics: Harmonic MitigationDevangi ChoudharyNo ratings yet
- Back-Up Relay Pairs.: Shantilal Shah Engineering CollegeDocument11 pagesBack-Up Relay Pairs.: Shantilal Shah Engineering Collegemanan desai50% (2)
- Power System Voltage StabilityDocument31 pagesPower System Voltage StabilityVenkatesh PeruthambiNo ratings yet
- FerrantiDocument5 pagesFerrantiPratik RanjanNo ratings yet
- Electrical Distribution Systems DOC1Document25 pagesElectrical Distribution Systems DOC1Ravi TejaNo ratings yet
- Trainer Guide PDFDocument99 pagesTrainer Guide PDFPhil ChawiraNo ratings yet
- 4-Electrical Machines PDFDocument32 pages4-Electrical Machines PDFRenkak OrNo ratings yet
- William H. Kersting-Distribution System Modeling and Analysis (Electric Power Engineering Series) - CRC Press (2001)Document20 pagesWilliam H. Kersting-Distribution System Modeling and Analysis (Electric Power Engineering Series) - CRC Press (2001)عبدالملك السياغي0% (1)
- Voltage Stability AnalysisDocument29 pagesVoltage Stability Analysisyohannis masreshaNo ratings yet
- Transformer (Voltage Regulation and Efficiency)Document15 pagesTransformer (Voltage Regulation and Efficiency)JhiGz Llausas de GuzmanNo ratings yet
- EE254 1 IntroductionDocument47 pagesEE254 1 IntroductionClint GengosNo ratings yet
- SKM Systems Analysis - Three Winding Transformer Application GuideDocument4 pagesSKM Systems Analysis - Three Winding Transformer Application GuidejamesbitsasNo ratings yet
- Computer Aided Design of Transformer Station Grounding System Using CdegsDocument8 pagesComputer Aided Design of Transformer Station Grounding System Using CdegsAnwesh Kumar MaddikuntaNo ratings yet
- EE 256 Notes 4 - Line ProtectionDocument68 pagesEE 256 Notes 4 - Line ProtectionEdu Daryl MacerenNo ratings yet
- PQ Unit 1Document21 pagesPQ Unit 1Ezhiln 0328sNo ratings yet
- Tutorial On Single Phase Induction MotorDocument1 pageTutorial On Single Phase Induction MotorHimanshu Saini0% (1)
- Advance Power SystemsDocument88 pagesAdvance Power SystemsRachit KhannaNo ratings yet
- Emtp PDFDocument34 pagesEmtp PDFagkacdm1163100% (1)
- Psat-1 3 4Document463 pagesPsat-1 3 4Balakrushna Sahu100% (2)
- PSAS-UNIT-III Symmetrical Fault AnalysisDocument39 pagesPSAS-UNIT-III Symmetrical Fault Analysissaibhuvan chitchulaNo ratings yet
- Unit II Symmetrical Fault (Three Phase) Analysis: Transient On A Transmission LineDocument12 pagesUnit II Symmetrical Fault (Three Phase) Analysis: Transient On A Transmission LinePankaj SarnobatNo ratings yet
- An Overview of Short Circuit CurrentDocument6 pagesAn Overview of Short Circuit CurrentGianey Fernandes da SilvaNo ratings yet
- Short Circuit CurrentDocument6 pagesShort Circuit CurrentuplbselesNo ratings yet
- Symmetrical FaultDocument54 pagesSymmetrical FaultshinkazamaNo ratings yet
- 17ee62module 2 PsaDocument18 pages17ee62module 2 PsaShreyas KanabaragiNo ratings yet
- Power Quality in Grid Connected Renewable Energy SDocument7 pagesPower Quality in Grid Connected Renewable Energy SRamshaNo ratings yet
- Hunter X CoreDocument32 pagesHunter X Coretennis5luvNo ratings yet
- 0 515 010 358 - Quartz Clock-Engine Hour Meter InstallationDocument2 pages0 515 010 358 - Quartz Clock-Engine Hour Meter InstallationAsep KurniawanNo ratings yet
- 5.2PVGIS Scoala - Bisericani - Sud 1.0 CPDocument1 page5.2PVGIS Scoala - Bisericani - Sud 1.0 CPVlad JulaNo ratings yet
- 1508333679MP 5200Document20 pages1508333679MP 5200engenhariahabNo ratings yet
- Alternator AdvantagesDocument4 pagesAlternator AdvantagesJeff Regor EbaloNo ratings yet
- EAPRO CatalogueDocument16 pagesEAPRO CatalogueandresNo ratings yet
- Tesla Derii VeronikaDocument20 pagesTesla Derii VeronikaVeronikaNo ratings yet
- Arc Flash Guide v2Document9 pagesArc Flash Guide v2Anonymous V6y1QL6hnNo ratings yet
- Cutouts CatalogueDocument24 pagesCutouts CataloguemohangaruNo ratings yet
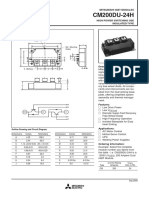
- Mitsubishi Igbt Modules Cm200du-24h High Power Switching Use Insulated TypeDocument4 pagesMitsubishi Igbt Modules Cm200du-24h High Power Switching Use Insulated TypeNomanNo ratings yet
- Wednesday 14 June: Room: Lomond AuditoriumDocument22 pagesWednesday 14 June: Room: Lomond AuditoriumivanramljakNo ratings yet
- AntMiner U3 User GuideDocument12 pagesAntMiner U3 User GuideelisaadliNo ratings yet
- Tr01 10e Power Transformes 2mva and Above Revision 9Document109 pagesTr01 10e Power Transformes 2mva and Above Revision 9Emanuel CondeNo ratings yet
- Strain Gauge/Bridge/Load Cell/Pressure Transducer To DC Transmitters, Field Rangeable APD 4059Document4 pagesStrain Gauge/Bridge/Load Cell/Pressure Transducer To DC Transmitters, Field Rangeable APD 4059luat1983No ratings yet
- WWW - Iranswitching.Ir: Ac/Dc Switch Mode Power Supply Design GuideDocument1 pageWWW - Iranswitching.Ir: Ac/Dc Switch Mode Power Supply Design GuidedraNo ratings yet
- Statement of Working Drawings: Calculation Scheme of SCHSDocument71 pagesStatement of Working Drawings: Calculation Scheme of SCHSaayushNo ratings yet
- Dodge Nitro KA - 2007 - DefoggerDocument10 pagesDodge Nitro KA - 2007 - DefoggereephantomNo ratings yet
- KSH 13007 ADocument6 pagesKSH 13007 AAndre STANo ratings yet
- Chapter 6.2 - Speed Control of Ac MotorDocument45 pagesChapter 6.2 - Speed Control of Ac MotorWeehao SiowNo ratings yet
- EV Report Executive Summary - Sudeep Bhurat PDFDocument9 pagesEV Report Executive Summary - Sudeep Bhurat PDFsudeep bhuratNo ratings yet
- P and Inverter Board CJ718 Simplified Test Specifications: MET-CDCF-CJ728-S1Document13 pagesP and Inverter Board CJ718 Simplified Test Specifications: MET-CDCF-CJ728-S1Yudistira MarsyaNo ratings yet