You might also like
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- Determination of The Best Models For Reinforced Concrete Struts and TiesDocument9 pagesDetermination of The Best Models For Reinforced Concrete Struts and TiesBadr AmmarNo ratings yet
- Strut and Tie LectureDocument18 pagesStrut and Tie Lecturemalumius100% (1)
- Schlaich Truss Models PCI 1987Document39 pagesSchlaich Truss Models PCI 1987mcunh4No ratings yet
- Strut-And-Tie Model Design Provisions: Robin G. Tuchscherer, David B. Birrcher, and Oguzhan BayrakDocument16 pagesStrut-And-Tie Model Design Provisions: Robin G. Tuchscherer, David B. Birrcher, and Oguzhan BayrakDavid Apaza QuispeNo ratings yet
- 1.1 General Presentation: ? (Why Shear?! If The Method Use The Truss Concept Which Is Axial and Without Shear)Document5 pages1.1 General Presentation: ? (Why Shear?! If The Method Use The Truss Concept Which Is Axial and Without Shear)Badr AmmarNo ratings yet
- GRASPDocument131 pagesGRASPdumiran18No ratings yet
- 7 - Biela - Tirante (INGLÊS)Document13 pages7 - Biela - Tirante (INGLÊS)az1993No ratings yet
- Ziemian Et Al-2018-Steel ConstructionDocument6 pagesZiemian Et Al-2018-Steel ConstructionHicham Said BoukhalkhalNo ratings yet
- Strut and Tie Models Recommended ReadingDocument2 pagesStrut and Tie Models Recommended ReadingBadr AmmarNo ratings yet
- Prokon Brochure Structural Analysis 2017-08-29Document8 pagesProkon Brochure Structural Analysis 2017-08-29SelvasathaNo ratings yet
- Strut and Tie PierDocument7 pagesStrut and Tie PierYisus NuñezNo ratings yet
- Chapter 1 CraigDocument12 pagesChapter 1 CraigJuan Angel RodNo ratings yet
- Strut and Tie MethodDocument74 pagesStrut and Tie MethodJuan Mario Guevara PenarandaNo ratings yet
- 10.1201 9781315182964-77 ChapterpdfDocument10 pages10.1201 9781315182964-77 ChapterpdfSlavoljub IlicNo ratings yet
- SZDFSZDFDocument34 pagesSZDFSZDFDanielRoblesTorresNo ratings yet
- Part I - Basics FlexibilityDocument17 pagesPart I - Basics FlexibilityDawit Gebrehana100% (2)
- Understanding 2D Structural AnalysisDocument131 pagesUnderstanding 2D Structural AnalysisFrancis Prince ArtiagaNo ratings yet
- 1) Executive Summary 2) Strut and Tie Modeling Report 3) Deep Beam Example CalculationDocument4 pages1) Executive Summary 2) Strut and Tie Modeling Report 3) Deep Beam Example CalculationMansoorNo ratings yet
- Stress Concentration Study in Steel Elastic Element of Load CellDocument6 pagesStress Concentration Study in Steel Elastic Element of Load CellAbu Bakr M. SaeedNo ratings yet
- The Transformation of Nonlinear Structure Analysis Model From Nosacad To Abaqus and Perform-3DDocument10 pagesThe Transformation of Nonlinear Structure Analysis Model From Nosacad To Abaqus and Perform-3DIngeniero Emmanuel RodriguezNo ratings yet
- Stringer Panel Method. A Discrete Model To Project Structural Reinforced Concrete ElementsDocument7 pagesStringer Panel Method. A Discrete Model To Project Structural Reinforced Concrete ElementsJose Maria GedaNo ratings yet
- Evaluation of Seismic Performance of RC Frame Structures by Pushover and Time History Analyses - Part-5Document15 pagesEvaluation of Seismic Performance of RC Frame Structures by Pushover and Time History Analyses - Part-5Adam Michael GreenNo ratings yet
- ACI 97 S39 Slab Column Frame Laterally Loaded 2000Document9 pagesACI 97 S39 Slab Column Frame Laterally Loaded 2000Anabel ArochaNo ratings yet
- Chapter-6 Structural Analysis Methods/design Approaches, Assumptions and Approximations For Practical Life Line StructureDocument39 pagesChapter-6 Structural Analysis Methods/design Approaches, Assumptions and Approximations For Practical Life Line StructurenNo ratings yet
- 16 - Chapter 6 PDFDocument39 pages16 - Chapter 6 PDFKoustav MajumdarNo ratings yet
- Irjet V3i5198 PDFDocument4 pagesIrjet V3i5198 PDFKaka AsefNo ratings yet
- 16 - Chapter 6 PDFDocument39 pages16 - Chapter 6 PDFDipankar NathNo ratings yet
- Lecture 3Document30 pagesLecture 3Ravi kumarNo ratings yet
- PTI Journal Hyperstatic!!Document13 pagesPTI Journal Hyperstatic!!rammirisNo ratings yet
- Strut and Tie Models ACIDocument13 pagesStrut and Tie Models ACIRômulo Menck RomanichenNo ratings yet
- Strut and Tie LectureDocument9 pagesStrut and Tie LectureNAUTILUS87No ratings yet
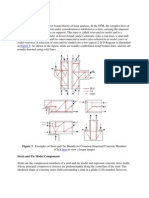
- Figure 1 Example of D-Regions in A Common Building StructureDocument13 pagesFigure 1 Example of D-Regions in A Common Building StructureCristobal Jimenez MuchoNo ratings yet
- Report Body NewDocument84 pagesReport Body Newreloaded63No ratings yet
- ComparisonofAxialLoadonColumn FormattedPaperDocument7 pagesComparisonofAxialLoadonColumn FormattedPaperVictor Omotoriogun100% (1)
- Nodal Regions) - A Selection of Strut-And-Tie Models For A Few Typical 2-D D-Regions Is IllustratedDocument9 pagesNodal Regions) - A Selection of Strut-And-Tie Models For A Few Typical 2-D D-Regions Is IllustratedPrasanth NairNo ratings yet
- Module07 Strut & Tie ModelsDocument32 pagesModule07 Strut & Tie ModelsEkky CecilNo ratings yet
- Concept of STM Paper ACIDocument9 pagesConcept of STM Paper ACIshish0iitrNo ratings yet
- Development of Strut and Tie Models For Simply Supported Deep Beams Using Topology OptimizationDocument7 pagesDevelopment of Strut and Tie Models For Simply Supported Deep Beams Using Topology OptimizationzxcvhjNo ratings yet
- Stringer Panel ModeDocument16 pagesStringer Panel Modepperic13100% (1)
- Effect of Lateral Load Patterns in Pushover Analysis: November 2009Document6 pagesEffect of Lateral Load Patterns in Pushover Analysis: November 2009mohamedNo ratings yet
- Structural ANALYSIS Idealization of Structures and LoadsDocument7 pagesStructural ANALYSIS Idealization of Structures and LoadspulijNo ratings yet
- Determination of Capacity CurvesDocument8 pagesDetermination of Capacity CurvesBabita SharmaNo ratings yet
- Inverted-T Beams: Experiments and Strut-and-Tie Modeling: Aci Structural Journal Technical PaperDocument10 pagesInverted-T Beams: Experiments and Strut-and-Tie Modeling: Aci Structural Journal Technical Paperchaval01No ratings yet
- Buckling Analysis Design of Steel FramesDocument0 pagesBuckling Analysis Design of Steel FramestangkokhongNo ratings yet
- Analysis of Concrete Structure by STM - R3Document115 pagesAnalysis of Concrete Structure by STM - R3Prasad SamantNo ratings yet
- Effect of 3-D Modeling On Design of Pre-Engineered Steel BuildingsDocument6 pagesEffect of 3-D Modeling On Design of Pre-Engineered Steel BuildingsSuno AliNo ratings yet
- C 9 - Long ColumnsDocument29 pagesC 9 - Long ColumnsRekanNo ratings yet
- Limit Analysis Fast Methods For Assessment of Progressive Collapse Potential in RC Structures (Ioani, Et Al. 2013)Document10 pagesLimit Analysis Fast Methods For Assessment of Progressive Collapse Potential in RC Structures (Ioani, Et Al. 2013)Jose ManuelNo ratings yet
- Thesis ChaptersDocument84 pagesThesis Chapterssam_bhopNo ratings yet
- Transverse Design of RC Hollow Box Bridge GirderDocument8 pagesTransverse Design of RC Hollow Box Bridge GirderEsmeraldNo ratings yet
- W8 KNS3643 Frame AnalysisDocument26 pagesW8 KNS3643 Frame AnalysisNur Hazirah SadonNo ratings yet
- Paper Goldbach Advanced Building SkinsDocument6 pagesPaper Goldbach Advanced Building SkinsJorge Luis Garcia ZuñigaNo ratings yet
- Reinforced Concrete Buildings: Behavior and DesignFrom EverandReinforced Concrete Buildings: Behavior and DesignRating: 5 out of 5 stars5/5 (1)
- Dynamic Damage and FragmentationFrom EverandDynamic Damage and FragmentationDavid Edward LambertNo ratings yet
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionFrom EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionRating: 2.5 out of 5 stars2.5/5 (4)
- Non-Linear Structures: Matrix Methods of Analysis and Design by ComputersFrom EverandNon-Linear Structures: Matrix Methods of Analysis and Design by ComputersRating: 4.5 out of 5 stars4.5/5 (2)
- Structural Design Calculations Facade 1Document184 pagesStructural Design Calculations Facade 1Badr AmmarNo ratings yet
- Project Name Contract No Client Attention To Transmittal No Transmittal Date SubjectDocument2 pagesProject Name Contract No Client Attention To Transmittal No Transmittal Date SubjectBadr AmmarNo ratings yet
- Structural Design Calculations Facade 2Document163 pagesStructural Design Calculations Facade 2Badr AmmarNo ratings yet
- Attach - 1 Quality (MOM-V0003-AEN-003-2018)Document20 pagesAttach - 1 Quality (MOM-V0003-AEN-003-2018)Badr AmmarNo ratings yet
- Structural Design Calculations AtriumDocument31 pagesStructural Design Calculations AtriumBadr AmmarNo ratings yet
- The Effect of Different Opening Configuration in Multi-Story RC Building With Shear WallDocument4 pagesThe Effect of Different Opening Configuration in Multi-Story RC Building With Shear WallBadr AmmarNo ratings yet
- Design of BeamsDocument1 pageDesign of BeamsBadr AmmarNo ratings yet
- Analysis of Beams PDFDocument2 pagesAnalysis of Beams PDFBadr AmmarNo ratings yet
- 8 1 Column CapacityDocument1 page8 1 Column CapacityBadr AmmarNo ratings yet
- Argantina Football Team: # Name Year AGE Club COPA 2020 CUP 2022 ReplaceDocument1 pageArgantina Football Team: # Name Year AGE Club COPA 2020 CUP 2022 ReplaceBadr AmmarNo ratings yet
- Flat Slab: Using First Principals (/) رتم نط تادحولاب نوكت موزعلا نا ثيحDocument3 pagesFlat Slab: Using First Principals (/) رتم نط تادحولاب نوكت موزعلا نا ثيحBadr AmmarNo ratings yet
- Strut and Tie Models Recommended ReadingDocument2 pagesStrut and Tie Models Recommended ReadingBadr AmmarNo ratings yet
- Min. Steel: Smart NotesDocument2 pagesMin. Steel: Smart NotesBadr AmmarNo ratings yet
- 1-Wall LoadDocument1 page1-Wall LoadBadr AmmarNo ratings yet
- 6 Shear DesignDocument3 pages6 Shear DesignBadr AmmarNo ratings yet
- Determination of The Best Models For Reinforced Concrete Ties and StrutsDocument2 pagesDetermination of The Best Models For Reinforced Concrete Ties and StrutsBadr AmmarNo ratings yet
- The STRUT Part 1Document15 pagesThe STRUT Part 1Badr AmmarNo ratings yet
- Strength and Ductility of Reinforced Concrete Moment Frame Connections Strengthened With Quasi-Isotropic LaminatesDocument6 pagesStrength and Ductility of Reinforced Concrete Moment Frame Connections Strengthened With Quasi-Isotropic LaminatesBadr AmmarNo ratings yet
- Prestress Losses IRC 112-2011Document2 pagesPrestress Losses IRC 112-2011naveen srinivasNo ratings yet
- AbaqusDocument142 pagesAbaqusBahaa HussainNo ratings yet
- 1.10 Hookes Law - NotesDocument9 pages1.10 Hookes Law - NotesQuentin Benihime MakNo ratings yet
- Finite Element Analysis and Optimization of Universal Joint Yoke Using CAE ToolsDocument4 pagesFinite Element Analysis and Optimization of Universal Joint Yoke Using CAE ToolsEditor IJRITCCNo ratings yet
- Thermo-Fatigue Life Evaluation of Snagcu Solder Joints in Flip Chip AssembliesDocument7 pagesThermo-Fatigue Life Evaluation of Snagcu Solder Joints in Flip Chip AssembliesDurgesh KhannaNo ratings yet
- CE 014 - Principles of Steel Design: Assignment 1.3Document4 pagesCE 014 - Principles of Steel Design: Assignment 1.3Jomar LampitokNo ratings yet
- B. Can A Buried Natural Gas Pipeline Buckle Locally During Earthquake Ground ShakingDocument19 pagesB. Can A Buried Natural Gas Pipeline Buckle Locally During Earthquake Ground ShakingJaime SeguraNo ratings yet
- Elements of Fracture MechanicsDocument8 pagesElements of Fracture MechanicsMachine DesignNo ratings yet
- Soil Dynamics and Earthquake Engineering: A. Nakhaei, S.M. Marandi, S. Sani Kermani, M.H. BagheripourDocument9 pagesSoil Dynamics and Earthquake Engineering: A. Nakhaei, S.M. Marandi, S. Sani Kermani, M.H. BagheripourDhanya ce13d027No ratings yet
- Materials and Design: Mohamed G. Elkhateeb, Yung C. ShinDocument12 pagesMaterials and Design: Mohamed G. Elkhateeb, Yung C. ShinÁlvaro Nieto CastroNo ratings yet
- Lusas Modeller User ManualDocument124 pagesLusas Modeller User ManualAndrei Mănălăchioae100% (1)
- Tevi RotundeDocument8 pagesTevi RotundebigggredNo ratings yet
- Tabel Baja WF-LRFDDocument8 pagesTabel Baja WF-LRFDfaizalmuhammadNo ratings yet
- Westergaard SolutionsDocument99 pagesWestergaard SolutionssupperpainintheneckNo ratings yet
- Springer - Computational Modeling, Optimization and Manufacturing Simulation of Advanced Engineering Materials - P. Andrés, M.-Rojas (2016)Document392 pagesSpringer - Computational Modeling, Optimization and Manufacturing Simulation of Advanced Engineering Materials - P. Andrés, M.-Rojas (2016)rararafafafaNo ratings yet
- 3D Printer User Manual: Create Reality Achieve DreamsDocument24 pages3D Printer User Manual: Create Reality Achieve DreamsNathanNo ratings yet
- ESAS Compilation of ObjectivesDocument22 pagesESAS Compilation of ObjectivesWar Lock0% (1)
- High-Strain Dynamic Testing of Deep Foundations: Standard Test Method ForDocument10 pagesHigh-Strain Dynamic Testing of Deep Foundations: Standard Test Method ForRahish RaviNo ratings yet
- GI$. Note That Since: O P E AE PL AL AEDocument6 pagesGI$. Note That Since: O P E AE PL AL AESuraj KumarNo ratings yet
- PFS 01-A @2KPa R00Document111 pagesPFS 01-A @2KPa R00Aniket InarkarNo ratings yet
- SOM-Unit-4 QuestionsDocument39 pagesSOM-Unit-4 QuestionsI ALPHABLADENo ratings yet
- Diana Concrete and Masonry TutorialsDocument42 pagesDiana Concrete and Masonry TutorialsImrose Bin MuhitNo ratings yet
- Design, Simulation and Manufacturing Prototyping of Energetic Load Handling System For Bullet Proof JacketsDocument14 pagesDesign, Simulation and Manufacturing Prototyping of Energetic Load Handling System For Bullet Proof JacketsArangi RavindraNo ratings yet
- T. M. Ferreira Et Al., 2015. Analysis of The Out of Plane Seismic Behavior of Unreinforced Masonry A Literature ReviewDocument25 pagesT. M. Ferreira Et Al., 2015. Analysis of The Out of Plane Seismic Behavior of Unreinforced Masonry A Literature ReviewMichael PisfilNo ratings yet
- MD Nastran R2.1 Release GuideDocument324 pagesMD Nastran R2.1 Release GuideMSC Nastran BeginnerNo ratings yet
- Webinar Structural and Thermal Analysis With MATLAB PDFDocument12 pagesWebinar Structural and Thermal Analysis With MATLAB PDFAlisson Victoriano100% (1)
- Subgrade Modulas (K)Document10 pagesSubgrade Modulas (K)ကိုနေဝင်း100% (4)
- Damage and Plasticity For Concrete BehaviorDocument16 pagesDamage and Plasticity For Concrete BehaviorJosé Antonio Cornetero UrpequeNo ratings yet
- MSE 203: Mechanical Behaviour Continuum Mechanics (Stress Tensors)Document34 pagesMSE 203: Mechanical Behaviour Continuum Mechanics (Stress Tensors)Praveen JainNo ratings yet
- Strap: Structural Analysis ProgramsDocument2 pagesStrap: Structural Analysis ProgramsSalvatore ShwNo ratings yet