You might also like
- Al-Balqa' Applied University: Electronics LabDocument54 pagesAl-Balqa' Applied University: Electronics Labahmad abufaresNo ratings yet
- Bài Tập Số 4 - Tiểu Luận: Trường Đại Học Tôn Đức Thắng Khoa Điện - Điện TửDocument25 pagesBài Tập Số 4 - Tiểu Luận: Trường Đại Học Tôn Đức Thắng Khoa Điện - Điện TửNguyễn Hồng HạnhNo ratings yet
- Lect05 PDFDocument15 pagesLect05 PDFVan GoldbergNo ratings yet
- Activity3 Group1Document16 pagesActivity3 Group1NicoNo ratings yet
- Activity 2B Impedance of RL Circuits: Parallel RL Curcuits 2B.1 Program Outcomes (Pos) Addressed by The ActivityDocument8 pagesActivity 2B Impedance of RL Circuits: Parallel RL Curcuits 2B.1 Program Outcomes (Pos) Addressed by The ActivityNicoNo ratings yet
- Activity No. 4 Inductive Circuit ObjectivesDocument4 pagesActivity No. 4 Inductive Circuit ObjectivesJohn Paul BaquiranNo ratings yet
- Activity 3B Impedance of RC Circuits: Parallel RC Circuits 3B.1 Program Outcomes (Pos) Addressed by The ActivityDocument8 pagesActivity 3B Impedance of RC Circuits: Parallel RC Circuits 3B.1 Program Outcomes (Pos) Addressed by The ActivityNicoNo ratings yet
- Modelling of Load Flow Analysis in MatlabSimulink Software2Document47 pagesModelling of Load Flow Analysis in MatlabSimulink Software2Bách Tạ DuyNo ratings yet
- Đ Án Rơ Le DuyDocument44 pagesĐ Án Rơ Le Duynam phuongNo ratings yet
- Experiment 3 - Transmission Lines, Part 1Document29 pagesExperiment 3 - Transmission Lines, Part 1Anonymous c75J3yX33No ratings yet
- Circuits 2 Laboratory L31A: ScoreDocument20 pagesCircuits 2 Laboratory L31A: ScoreNicoNo ratings yet
- Chapter 4: Microwave Network AnalysisDocument6 pagesChapter 4: Microwave Network AnalysisGus RodriguezNo ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- TSEK03/TEN1 R F I C: Xamination inDocument6 pagesTSEK03/TEN1 R F I C: Xamination inAyman Nayef Mahmoud Al AzzamNo ratings yet
- An-Najah University: Electrical Circuits LabDocument7 pagesAn-Najah University: Electrical Circuits LabAdel AtawiNo ratings yet
- Theory Question On EEE 4103Document6 pagesTheory Question On EEE 4103Salma AkterNo ratings yet
- Declarador-Lasaleta-Activity 2Document14 pagesDeclarador-Lasaleta-Activity 2Kervin DeclaradorNo ratings yet
- Mosfet CharacterisationDocument10 pagesMosfet CharacterisationK.Raghuram ChakravorthyNo ratings yet
- MOSFET Current Mirror PDFDocument27 pagesMOSFET Current Mirror PDFaliNo ratings yet
- Effect of Power Transformer Neutral Grounding On High Voltage Network Single Phase Short Circuit LevelDocument7 pagesEffect of Power Transformer Neutral Grounding On High Voltage Network Single Phase Short Circuit Levelمحمد الأمين سنوساويNo ratings yet
- Electronic CircuitsDocument5 pagesElectronic CircuitsSage MaphikeNo ratings yet
- ELA1501-2023-S1-Major Test 2Document4 pagesELA1501-2023-S1-Major Test 2Ayanda AyoNo ratings yet
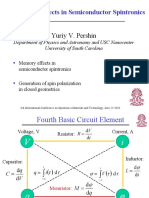
- Dynamical Effects in Semiconductor SpintronicsDocument23 pagesDynamical Effects in Semiconductor SpintronicsShafkat Sakeebur RahmanNo ratings yet
- Analog Ee Formula Notes 83 42Document61 pagesAnalog Ee Formula Notes 83 42life. samarthNo ratings yet
- Induction Motor 2003Document24 pagesInduction Motor 2003hdrzaman9439No ratings yet
- Dkk1352-Electrical Technology 21213Document7 pagesDkk1352-Electrical Technology 21213Kalterz UnionNo ratings yet
- Ring OscillatorDocument13 pagesRing OscillatorAnonymous eWMnRr70qNo ratings yet
- Analysis and Simulation of LLC Resonant DC-DC Converter For Photovoltaic ApplicationsDocument8 pagesAnalysis and Simulation of LLC Resonant DC-DC Converter For Photovoltaic ApplicationsГеорги ТерзийскиNo ratings yet
- Electrical Circuits LabDocument64 pagesElectrical Circuits LabraveendrababupNo ratings yet
- EE254: D2 Buck ConverterDocument13 pagesEE254: D2 Buck ConverterNeil Hildick-SmithNo ratings yet
- Power System-II: Experiment 5 Title: Formulation and Calculation of Y-Bus Matrix of A Given System Using SoftwareDocument39 pagesPower System-II: Experiment 5 Title: Formulation and Calculation of Y-Bus Matrix of A Given System Using SoftwarePrasanna UdataNo ratings yet
- Traductoare de ProximitateDocument13 pagesTraductoare de ProximitateIulia GhiocNo ratings yet
- A Capacitor Paradox: Q On Its PlatesDocument7 pagesA Capacitor Paradox: Q On Its PlatesJoseph LeeNo ratings yet
- Unit-IV, Cmos Operational AmplifiersDocument45 pagesUnit-IV, Cmos Operational AmplifiersTejaswini KonetiNo ratings yet
- Ems ch9 NTDocument19 pagesEms ch9 NTPurna YalamanchiliNo ratings yet
- Course Roadmap - Rectification - Bipolar Junction TransistorDocument50 pagesCourse Roadmap - Rectification - Bipolar Junction TransistornoorNo ratings yet
- Lecture 10: Field-Oriented Control: ELEC-E8405 Electric Drives (5 ECTS)Document22 pagesLecture 10: Field-Oriented Control: ELEC-E8405 Electric Drives (5 ECTS)Yazid AbouchihabeddineNo ratings yet
- مختبر الالكترونيك شبكات & معلوماتDocument16 pagesمختبر الالكترونيك شبكات & معلوماتaddfgh177No ratings yet
- C2 Exp2.2Document8 pagesC2 Exp2.2NicoNo ratings yet
- Electric Circuit Analysis II: Center For Advanced Studies in Engineering, Islamabad Electronics LabDocument8 pagesElectric Circuit Analysis II: Center For Advanced Studies in Engineering, Islamabad Electronics LabIrfan HaiderNo ratings yet
- HITEC University Taxila: Power Electronics LabDocument9 pagesHITEC University Taxila: Power Electronics LabNisar Ahmed RanaNo ratings yet
- Expt 5.4Document6 pagesExpt 5.4Joel CatapangNo ratings yet
- Fuzzy Optimized Quadratic Boost Converter For Solar InverterDocument6 pagesFuzzy Optimized Quadratic Boost Converter For Solar InverterAkshaya MeeraNo ratings yet
- Experiment 1 Preliminary Report: ELEC3307 Electronics LaboratoryDocument5 pagesExperiment 1 Preliminary Report: ELEC3307 Electronics LaboratoryArda Deniz EryiğitNo ratings yet
- Modul Elda Ii Sem - 6 - 1Document7 pagesModul Elda Ii Sem - 6 - 1Jai YansenNo ratings yet
- 3ph Induction Mc-Te, MaxDocument6 pages3ph Induction Mc-Te, MaxMd Moinul Alom ShovonNo ratings yet
- مهم جداDocument23 pagesمهم جداMustafa AlhumayreNo ratings yet
- Learning Goals Mutual Inductance Behavior of Inductors Sharing A Common Magnetic FieldDocument25 pagesLearning Goals Mutual Inductance Behavior of Inductors Sharing A Common Magnetic Fieldckrishna625No ratings yet
- Stray CapacitanceDocument21 pagesStray Capacitancesyed.adi91No ratings yet
- Experiment5 SimulationStudyDocument12 pagesExperiment5 SimulationStudyRishikant KashyapNo ratings yet
- ET1006 - 1213S2Exam - With Answers For RevisionDocument15 pagesET1006 - 1213S2Exam - With Answers For RevisionfastNo ratings yet
- Superposition TheveninDocument4 pagesSuperposition TheveninrahulkrishnapagotiNo ratings yet
- 6026 NewGroundDirectional WebDocument20 pages6026 NewGroundDirectional WebVignesh ChalapathyNo ratings yet
- P 2Document16 pagesP 2Karl Vincent BebingNo ratings yet
- Lab Iv. Silicon Diode Characteristics: 1. ObjectiveDocument9 pagesLab Iv. Silicon Diode Characteristics: 1. ObjectiveRaja MariyappanNo ratings yet
- Q1S 2023Document2 pagesQ1S 2023Sanjay MallikarjunaNo ratings yet
- Expt 5.1Document6 pagesExpt 5.1Joel Catapang0% (1)
- Parallel Operation of Two Single Phase Transformers: Experiment No: 05Document18 pagesParallel Operation of Two Single Phase Transformers: Experiment No: 05Bhanoth MohanNo ratings yet
- Linear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionFrom EverandLinear Network Theory: The Commonwealth and International Library: Applied Electricity and Electronics DivisionNo ratings yet
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesFrom EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesRating: 4.5 out of 5 stars4.5/5 (7)
- Aec Mc007 Nelson MCT Cable Transit SystemDocument7 pagesAec Mc007 Nelson MCT Cable Transit Systembakien-canNo ratings yet
- Multi-Cabletransit: MCT Stops Fire, Gases, Water, Fumes, and WorryDocument8 pagesMulti-Cabletransit: MCT Stops Fire, Gases, Water, Fumes, and Worrybakien-canNo ratings yet
- Homer Getting Started 268Document28 pagesHomer Getting Started 268bakien-canNo ratings yet
- EMV Cable Transit, Modular System: Electromagnetic ScreeningDocument8 pagesEMV Cable Transit, Modular System: Electromagnetic Screeningbakien-canNo ratings yet
- EMV Multi Cable Transit Modular System (EMC-System) : PDFDocument7 pagesEMV Multi Cable Transit Modular System (EMC-System) : PDFbakien-canNo ratings yet
- 1:10 Model 4 Fixed Mount Advac EN: 750Mm FrameDocument8 pages1:10 Model 4 Fixed Mount Advac EN: 750Mm Framebakien-canNo ratings yet
- THE RAPID Sealing System: Rise Multi-Cable TransitsDocument44 pagesTHE RAPID Sealing System: Rise Multi-Cable Transitsbakien-canNo ratings yet
- Section 01 Electrical Design CriteriaDocument18 pagesSection 01 Electrical Design Criteriabakien-canNo ratings yet
- DriveWindow Light 3AFE68384575 en REVDDocument2 pagesDriveWindow Light 3AFE68384575 en REVDbakien-canNo ratings yet
- 3ADW000378R0101 DCS550 Catalog e ADocument20 pages3ADW000378R0101 DCS550 Catalog e Abakien-canNo ratings yet
- User's Manual: ACS-AP-x Assistant Control PanelsDocument60 pagesUser's Manual: ACS-AP-x Assistant Control Panelsbakien-canNo ratings yet
- ABB Industrial Drives: ACS880, Single Drives 0.55 To 250 KW CatalogDocument32 pagesABB Industrial Drives: ACS880, Single Drives 0.55 To 250 KW Catalogbakien-canNo ratings yet
- EN - Lowvoltagedrivesformining - REVADocument40 pagesEN - Lowvoltagedrivesformining - REVAbakien-canNo ratings yet
- Low Voltage Systems Protective Fuses in Commercial Industrial Applications Part 3 of 3Document67 pagesLow Voltage Systems Protective Fuses in Commercial Industrial Applications Part 3 of 3bakien-canNo ratings yet
- Lightning DesignDocument108 pagesLightning Designbakien-canNo ratings yet
- XT2N 160 TMA 63-630 3p F F: General InformationDocument3 pagesXT2N 160 TMA 63-630 3p F F: General Informationbakien-canNo ratings yet
- MasterPact Switch-Disconnectors 48235Document2 pagesMasterPact Switch-Disconnectors 48235bakien-canNo ratings yet
- SWR Meter ProjectDocument12 pagesSWR Meter ProjectfostechNo ratings yet
- A Comparison Between High-Impedance and Low-Impedance Restricted Earth-Fault Transformer ProtectionDocument9 pagesA Comparison Between High-Impedance and Low-Impedance Restricted Earth-Fault Transformer ProtectionManisha MisraNo ratings yet
- Nuclear Physics and Reactor Theory Vol 1 and 2Document245 pagesNuclear Physics and Reactor Theory Vol 1 and 2kollliNo ratings yet
- Cambridge IGCSE: Physics 0625/22Document16 pagesCambridge IGCSE: Physics 0625/22Isa ShahidNo ratings yet
- RESISTORSDocument3 pagesRESISTORSFaizal Usop PatikamanNo ratings yet
- Physics Practicals 1 and 2Document184 pagesPhysics Practicals 1 and 2Zahid ArainNo ratings yet
- Fe Simulation and Experiment of A Self Excited Synrel Generator Based On Comsol SoftwareDocument7 pagesFe Simulation and Experiment of A Self Excited Synrel Generator Based On Comsol SoftwareboucharebNo ratings yet
- Curriculum MechanicalDocument110 pagesCurriculum MechanicalpraveenNo ratings yet
- Electrical Machines II Atif Iqbal PDFDocument52 pagesElectrical Machines II Atif Iqbal PDFSantosh VarshneyNo ratings yet
- RCS 985Document3 pagesRCS 985Huget StNo ratings yet
- Dolphin Pro ManualDocument15 pagesDolphin Pro ManualMarcosNo ratings yet
- Summer Training Report On Unnao Sub Station PDFDocument59 pagesSummer Training Report On Unnao Sub Station PDFAnubhav SachanNo ratings yet
- Work Energy and PowerDocument5 pagesWork Energy and PowerjunquelalaNo ratings yet
- TSDOS Adv Diag Testing DW PDFDocument61 pagesTSDOS Adv Diag Testing DW PDFDhammika Dharmadasa100% (1)
- ECE2 The Second Paradigm ShiftDocument376 pagesECE2 The Second Paradigm ShiftSister RosettaNo ratings yet
- Appendix. A List of Studies ReviewedDocument8 pagesAppendix. A List of Studies ReviewedIlma HusnahNo ratings yet
- Failures in Three-Phase Stator WindingsDocument12 pagesFailures in Three-Phase Stator WindingsDavid Antonio Córdova LatorreNo ratings yet
- Performance Testing of Different Grounding SystemsDocument8 pagesPerformance Testing of Different Grounding SystemsFernandoCrespoMonNo ratings yet
- Soal UAS Genap 2019-2020Document3 pagesSoal UAS Genap 2019-2020MarfizalNo ratings yet
- Unit 5: High Voltage Testing & Insulation Coordination: Important Definitions: Disruptive Discharge VoltageDocument18 pagesUnit 5: High Voltage Testing & Insulation Coordination: Important Definitions: Disruptive Discharge VoltageANAND POZHATHNo ratings yet
- Kelvin Bridge: 2 Principle of OperationDocument3 pagesKelvin Bridge: 2 Principle of OperationDen AdenNo ratings yet
- Effective Value: 107.75x10 107.75x10 Ohm or 1.078x10 OhmDocument21 pagesEffective Value: 107.75x10 107.75x10 Ohm or 1.078x10 OhmJohn MarianoNo ratings yet
- Chapter 9 Center of Gravity, Center of Mass andDocument28 pagesChapter 9 Center of Gravity, Center of Mass andAnonymous uVgybS8No ratings yet
- Forces: Contact vs. NoncontactDocument13 pagesForces: Contact vs. NoncontactNapdeo Natka Emuy NatadNo ratings yet
- ELEQ GSA Broschyr enDocument4 pagesELEQ GSA Broschyr enJaime Salazar ArayaNo ratings yet
- General ScienceDocument46 pagesGeneral ScienceJosepino JosepinoNo ratings yet
- MST 2Document4 pagesMST 2Neha Prashant VermaNo ratings yet
- Simple Harmonic Motion by Edward AbellaDocument50 pagesSimple Harmonic Motion by Edward AbellaEdward Amoyen AbellaNo ratings yet
- A Detailed Lesson Plan in Science 10 - EM-WAVESDocument12 pagesA Detailed Lesson Plan in Science 10 - EM-WAVESCyril Cauilan100% (2)
- Quint DC UPS ManualDocument9 pagesQuint DC UPS ManualZain Ahmed MalikNo ratings yet