You might also like
- Control System Competitive Questions With AnswersDocument9 pagesControl System Competitive Questions With AnswersAnonymous D0FSPtyI8No ratings yet
- Analytic Geometry: Graphic Solutions Using Matlab LanguageFrom EverandAnalytic Geometry: Graphic Solutions Using Matlab LanguageNo ratings yet
- Control System Competitive Questions With AnswersDocument5 pagesControl System Competitive Questions With AnswersMohan RajNo ratings yet
- Control SystemDocument62 pagesControl SystemArpit VaidyaNo ratings yet
- Control SystemDocument62 pagesControl SystemPalani ThanarajNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- G S Corresponding To This Bode Plot IsDocument10 pagesG S Corresponding To This Bode Plot IssreekanthaNo ratings yet
- Control Systems QuestionsDocument28 pagesControl Systems Questionsdevraj22No ratings yet
- Control SystemDocument62 pagesControl SystemRatsih100% (1)
- BSNL Tta (Je) Control System 200 Expected QuestionsDocument26 pagesBSNL Tta (Je) Control System 200 Expected QuestionsprizcnuNo ratings yet
- EST Sample Problems 11Document6 pagesEST Sample Problems 11Genesis PinedaNo ratings yet
- Digitalcontrolsystems ProblemDocument23 pagesDigitalcontrolsystems Problemjeevitha babuNo ratings yet
- Control Systems With SolutionsDocument72 pagesControl Systems With Solutionsdevraj22No ratings yet
- Control Theory QuizDocument28 pagesControl Theory Quizpushplatameena1No ratings yet
- Signals & SystemsDocument48 pagesSignals & SystemsailamrudhulaNo ratings yet
- Answer: - (B) : - EC-GATE-2012 PAPERDocument16 pagesAnswer: - (B) : - EC-GATE-2012 PAPERZafar IqbalNo ratings yet
- Control Systems ElectricalDocument60 pagesControl Systems Electricalpushplatameena1No ratings yet
- Signals and Systems QuestionsDocument16 pagesSignals and Systems QuestionsVishal KumarNo ratings yet
- Control Systems-1 PDFDocument8 pagesControl Systems-1 PDFmaheshbabu527No ratings yet
- SIGNALS and SYSTEMS PDFDocument106 pagesSIGNALS and SYSTEMS PDFShashank Tiwari100% (1)
- Control SystemsDocument72 pagesControl SystemsprasadNo ratings yet
- GATE-Electronics & Comm (ECE) - 2008Document29 pagesGATE-Electronics & Comm (ECE) - 2008Shirshendu PanditNo ratings yet
- CONTROL SYSTEMS Set - 2 PDFDocument10 pagesCONTROL SYSTEMS Set - 2 PDFmaheshbabu527No ratings yet
- State Space ModellingDocument19 pagesState Space Modellingindula123No ratings yet
- ECE Mathematical Methods OCT 2022 ECE Board ExamDocument4 pagesECE Mathematical Methods OCT 2022 ECE Board ExamMark angelo RegosoNo ratings yet
- AE11 SolDocument62 pagesAE11 SolManmohan SinghNo ratings yet
- IES - Electronics Engineering - Control SystemDocument66 pagesIES - Electronics Engineering - Control SystemWaliullah Panhwar100% (1)
- Q. No. 1 - 25 Carry One Mark Each: DNX NX 0 DX LDocument17 pagesQ. No. 1 - 25 Carry One Mark Each: DNX NX 0 DX LChangal Reddy Yarrapu ReddyNo ratings yet
- Answer: (B) : EE-GATE-2013 PAPERDocument16 pagesAnswer: (B) : EE-GATE-2013 PAPERకృష్ణ మురళిNo ratings yet
- Gate EceDocument25 pagesGate Ecegreatbuddy2009No ratings yet
- 16-EL-A2 - Mai 2017 - Version AnglaiseDocument7 pages16-EL-A2 - Mai 2017 - Version Anglaisemadani abdelhamidNo ratings yet
- Control SystemsDocument25 pagesControl SystemsNandigam Chandu ChowdaryNo ratings yet
- IES - Electronics Engineering - Control SystemDocument66 pagesIES - Electronics Engineering - Control SystemPankaj SahuNo ratings yet
- Signals and SystemsDocument42 pagesSignals and SystemsDeepa DhilipNo ratings yet
- Gate - in 2007Document30 pagesGate - in 2007prabhjot singh1No ratings yet
- Microprocessors:: PIEAS MS Test (Electronics Portion 2016)Document6 pagesMicroprocessors:: PIEAS MS Test (Electronics Portion 2016)Usama IbrahimNo ratings yet
- Q. 1 - Q. 25 Carry One Mark Each.: X A X AADocument14 pagesQ. 1 - Q. 25 Carry One Mark Each.: X A X AAGauravArjariaNo ratings yet
- Assignment 02 SolutionsDocument7 pagesAssignment 02 SolutionsBugra AYANNo ratings yet
- CNTRL SystemsDocument38 pagesCNTRL SystemsmafzalsialNo ratings yet
- Automatic Control Systems and MeasurementsDocument8 pagesAutomatic Control Systems and Measurementsمهند محسن مخيلفNo ratings yet
- Control System 400 Objective Questions From GATE & IESDocument125 pagesControl System 400 Objective Questions From GATE & IESKiran Kumar100% (7)
- Answer: - (A) : VT 10V 5VDocument16 pagesAnswer: - (A) : VT 10V 5VMad HusNo ratings yet
- IES - Electronics Engineering - Control System PDFDocument66 pagesIES - Electronics Engineering - Control System PDFRod S Pangantihon Jr.No ratings yet
- GATE ECE 2010 (WWW - Egate.ws)Document16 pagesGATE ECE 2010 (WWW - Egate.ws)Arun SharmaNo ratings yet
- EE 2013 SolvedDocument16 pagesEE 2013 SolvedJammalaVenkataramanaNo ratings yet
- Gate Ece 1998Document9 pagesGate Ece 1998Janmejay OjhaNo ratings yet
- Ass4 PDFDocument7 pagesAss4 PDFbinu10eeeNo ratings yet
- MCQs From Carreride (Control Systems - Electronics Engineering Test Questions)Document11 pagesMCQs From Carreride (Control Systems - Electronics Engineering Test Questions)Qaisar_mastNo ratings yet
- Lab 1Document8 pagesLab 1Mulugeta AbebawNo ratings yet
- JiffyDOS 1571 Installation GuideDocument6 pagesJiffyDOS 1571 Installation GuideCommodore_64No ratings yet
- Ballast Specification: SECTION II - Controllable Light Output Electronic (Fluorescent)Document1 pageBallast Specification: SECTION II - Controllable Light Output Electronic (Fluorescent)Muhamad PriyatnaNo ratings yet
- Yamaha YSTSW45 ActsubDocument17 pagesYamaha YSTSW45 ActsubvasconiNo ratings yet
- Analog Integrated Circuits & Technology (EC 305) : Differential Amplifier With Passive Load and Its Detail AnalysisDocument13 pagesAnalog Integrated Circuits & Technology (EC 305) : Differential Amplifier With Passive Load and Its Detail AnalysisAbir HoqueNo ratings yet
- ATEIS DIVA 2016 Ver 5Document39 pagesATEIS DIVA 2016 Ver 5bhasker sharmaNo ratings yet
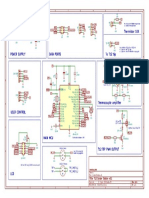
- Thermistor 10K: Tip+ Tip-Tip - Check - 1 Tip - Check - 2Document1 pageThermistor 10K: Tip+ Tip-Tip - Check - 1 Tip - Check - 2darioNo ratings yet
- PrinceCom Chapter 4 FINALEDocument4 pagesPrinceCom Chapter 4 FINALEjerson eyasNo ratings yet
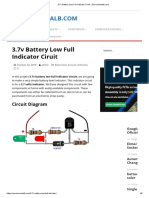
- 3.7v Battery Low Full Indicator CiruitDocument6 pages3.7v Battery Low Full Indicator CiruitPaulo henrique frigeriNo ratings yet
- Preline RTA 421: ContactorDocument6 pagesPreline RTA 421: ContactorMarco Antonio Esquivel BarretoNo ratings yet
- Electrical Engineering Paper-2 (PCC-EE-302) : Analog Electronic Total Marks - 70 Duration: 3HrsDocument2 pagesElectrical Engineering Paper-2 (PCC-EE-302) : Analog Electronic Total Marks - 70 Duration: 3HrsAmlan SarkarNo ratings yet
- Gate Driver Circuit For Three Phase InverterDocument13 pagesGate Driver Circuit For Three Phase InverterMarc TcheukabaNo ratings yet
- Camara Domo CNB LBM20SDocument1 pageCamara Domo CNB LBM20STecnoSmartNo ratings yet
- 701-302 HsaDocument8 pages701-302 HsaCristof Naek Halomoan TobingNo ratings yet
- Survival Craft VHF 2Document7 pagesSurvival Craft VHF 2Kunal SinghNo ratings yet
- Lecture 3 - Design FlowDocument18 pagesLecture 3 - Design Flowkumarkankipati19100% (1)
- PENTA - ANT-APE4518R20v06 DatasheetDocument3 pagesPENTA - ANT-APE4518R20v06 DatasheetluuiisxxxNo ratings yet
- Ei413 Instructions Rev4Document2 pagesEi413 Instructions Rev4d3danamaintenanceNo ratings yet
- Ovp Orava ctv-2181 16.1 SMDocument22 pagesOvp Orava ctv-2181 16.1 SMdancalin64No ratings yet
- Design and Construction of An FM TransmitterDocument3 pagesDesign and Construction of An FM Transmitterhealth is priorityNo ratings yet
- Raspberry Pi ZeroDocument215 pagesRaspberry Pi ZeroaielecNo ratings yet
- TS-180S 30Document30 pagesTS-180S 30Reisen80No ratings yet
- Microwave Sensor Technology HFE0407 - PolivkaDocument8 pagesMicrowave Sensor Technology HFE0407 - Polivkatecnolectronica890No ratings yet
- REF ProtectionDocument6 pagesREF ProtectionAshok KumarNo ratings yet
- JBL Ceiling Speaker PDFDocument23 pagesJBL Ceiling Speaker PDFKhay SaadNo ratings yet
- OTA Structures2Document13 pagesOTA Structures2Debopam DattaNo ratings yet
- Modul 02 Siskom2 Matched FilterDocument17 pagesModul 02 Siskom2 Matched FilterAmir MiftahudinNo ratings yet
- RS485 White PaperDocument8 pagesRS485 White PaperReinaldo SouzaNo ratings yet
- EB312Document12 pagesEB312Alejandro MartinezNo ratings yet
- BF2040Document11 pagesBF2040bookreader1968No ratings yet