You might also like
- Iriset: इ रसेट गाड़ी िडटे शन योगशाला योग सं: - 21 Train Detection Laboratory Experiment No: Tdl - 21Document9 pagesIriset: इ रसेट गाड़ी िडटे शन योगशाला योग सं: - 21 Train Detection Laboratory Experiment No: Tdl - 21Ashish SadaNo ratings yet
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Railway Signalling Axle-Counter SystemDocument2 pagesRailway Signalling Axle-Counter SystemJitendraKalerNo ratings yet
- इ रसेट गाड़ी िडटे शन योगशाला योग सं: टी डी एल - 14 Iriset: Train Detection Laboratory Experiment No: Tdl - 14Document14 pagesइ रसेट गाड़ी िडटे शन योगशाला योग सं: टी डी एल - 14 Iriset: Train Detection Laboratory Experiment No: Tdl - 14Rambabu VaggaNo ratings yet
- Pocketbook - Frauscher FAdCDocument38 pagesPocketbook - Frauscher FAdCmonumunduriNo ratings yet
- Installation Manual For Single Section Digital Axle Counterdacf710p (CEL Make)Document137 pagesInstallation Manual For Single Section Digital Axle Counterdacf710p (CEL Make)Vikas Srivastav100% (7)
- 05di Dscsasc 30Document3 pages05di Dscsasc 30Erdinc KlimaNo ratings yet
- AzLM Axle COunters ReportDocument44 pagesAzLM Axle COunters Reportcdevikar50% (2)
- इ रसेट गाड़ी िडटे शन योगशाला योग सं: - 11 Train Detection Laboratory Experiment No: Tdl - 11Document8 pagesइ रसेट गाड़ी िडटे शन योगशाला योग सं: - 11 Train Detection Laboratory Experiment No: Tdl - 11Saurabh MoharirNo ratings yet
- Bpac NoteDocument17 pagesBpac NoteSampreeth Nambisan Perigini100% (1)
- Block Proving Axle Counter: Southern Railway Signal & Telecommunication Training CentreDocument17 pagesBlock Proving Axle Counter: Southern Railway Signal & Telecommunication Training CentresampreethpNo ratings yet
- Protección Diferencial de Barras DistribuidaDocument15 pagesProtección Diferencial de Barras DistribuidayesrojasNo ratings yet
- 92020110Document30 pages92020110m100% (1)
- Systems Operation (SENR9167-02)Document11 pagesSystems Operation (SENR9167-02)Anderson Oliveira SilvaNo ratings yet
- Steval-Esc001v1 230905 042937Document7 pagesSteval-Esc001v1 230905 042937Nineveh Health DepartmentNo ratings yet
- Installation Manual For Dacf710a CEL MakeDocument134 pagesInstallation Manual For Dacf710a CEL MakeVikas SrivastavNo ratings yet
- R P S, C & R D S W: Ecipes To Romote Tandardization Entralization Edundancy INA Igital Ubstation OrldDocument27 pagesR P S, C & R D S W: Ecipes To Romote Tandardization Entralization Edundancy INA Igital Ubstation OrldneranjansNo ratings yet
- CmosDocument28 pagesCmosJesús Eduardo Obando GarcíaNo ratings yet
- FACT Shutter User Guide - v0.1 Draft: 1 System OverviewDocument7 pagesFACT Shutter User Guide - v0.1 Draft: 1 System OverviewTriều NguyễnNo ratings yet
- Digital Axle Counter: Presented by Chandru.S Sse/Sig/SaDocument90 pagesDigital Axle Counter: Presented by Chandru.S Sse/Sig/Sakaarthik12No ratings yet
- GR00006800 54C PDFDocument218 pagesGR00006800 54C PDFToponari MedveNo ratings yet
- In-System Programming Cable ATDH2225 Fpga Configuration Eeprom MemoryDocument7 pagesIn-System Programming Cable ATDH2225 Fpga Configuration Eeprom Memorym3y54mNo ratings yet
- ElmsDocument37 pagesElmsMuhammad Zain Ul AbideenNo ratings yet
- NMC27C64 65,536-Bit CMOS EPROMDocument10 pagesNMC27C64 65,536-Bit CMOS EPROMwhynot05No ratings yet
- Maintenance Log SheetDocument6 pagesMaintenance Log Sheetvivek adNo ratings yet
- Axle Counter System IntroductionDocument9 pagesAxle Counter System Introductionsachinsurywanshi14No ratings yet
- TD-esc-02-De-En-10-002 Rev010 Overview of WEC and Control System DesignationsDocument10 pagesTD-esc-02-De-En-10-002 Rev010 Overview of WEC and Control System DesignationsFelipe SilvaNo ratings yet
- SUB-205R1 Itron Meter PDFDocument4 pagesSUB-205R1 Itron Meter PDFTGhareebNo ratings yet
- Computer Simulation of HV Circuit Breaker Interruption - EnergoBos ILJIN July 2017Document26 pagesComputer Simulation of HV Circuit Breaker Interruption - EnergoBos ILJIN July 2017Amer SmajkićNo ratings yet
- Aiwa Xr-Ms3u HCDocument13 pagesAiwa Xr-Ms3u HCJonatan NeitzelNo ratings yet
- Optical Instrument Transformers For EHV SubstationsS 0910Document28 pagesOptical Instrument Transformers For EHV SubstationsS 0910vijaykrishnatennetiNo ratings yet
- Analog Circuit Lab ManualDocument40 pagesAnalog Circuit Lab ManualAnurag siwachNo ratings yet
- Infineon ICE2PCS02 DataSheet v02 - 04 ENDocument20 pagesInfineon ICE2PCS02 DataSheet v02 - 04 ENrudra_1No ratings yet
- Guide 1Document2 pagesGuide 1sgdgtfNo ratings yet
- Hardware Overview (Chapter 2)Document74 pagesHardware Overview (Chapter 2)shkytenkoNo ratings yet
- ABB CS31 FPR3312101R1022 datasheetDocument6 pagesABB CS31 FPR3312101R1022 datasheetChristian BacconnaisNo ratings yet
- Electronic Circuit Analysis Lab ManualDocument51 pagesElectronic Circuit Analysis Lab Manualppat2006No ratings yet
- DVCon Europe 2015 TA4 3 PaperDocument8 pagesDVCon Europe 2015 TA4 3 PaperJon DCNo ratings yet
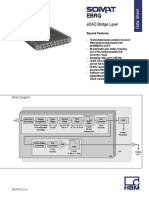
- Ebrg Bridge LayerDocument12 pagesEbrg Bridge LayerSK CCNo ratings yet
- Single Fet Bus Switch 2.5-V/3.3-V Low-Voltage Switch With 5-V-Tolerant Level ShifterDocument14 pagesSingle Fet Bus Switch 2.5-V/3.3-V Low-Voltage Switch With 5-V-Tolerant Level ShifterPablo LloveraNo ratings yet
- 05di DSCSPRG 30Document2 pages05di DSCSPRG 30Erdinc KlimaNo ratings yet
- Memory Interface Circuits 80x86 Processors: Ref: Online Course On EE-390, KFUPMDocument15 pagesMemory Interface Circuits 80x86 Processors: Ref: Online Course On EE-390, KFUPMMarcus QeqqrqrrqNo ratings yet
- Av02 0891en - Ds - Acpl m60l - 2017 03 03 1827568Document15 pagesAv02 0891en - Ds - Acpl m60l - 2017 03 03 1827568mikeguo76No ratings yet
- Thales Axle Counter Technology Ensures Railway Safety and Efficiency in GermanyDocument23 pagesThales Axle Counter Technology Ensures Railway Safety and Efficiency in GermanyKhuyến TrầnNo ratings yet
- Chasis M123ADocument89 pagesChasis M123AVictor Julio AlvarezNo ratings yet
- 1430807191660-Hassdac Manual PDFDocument157 pages1430807191660-Hassdac Manual PDFPooja SinghNo ratings yet
- Sensor Supply - Test: TroubleshootingDocument18 pagesSensor Supply - Test: TroubleshootingCarel100% (1)
- Bilik 2007Document5 pagesBilik 2007panait.florentina.k2iNo ratings yet
- TV Set Chassis: 5P60: Service ManualDocument40 pagesTV Set Chassis: 5P60: Service Manualdzarin_1No ratings yet
- HASSDAC Manual 25.4.15 - 0Document151 pagesHASSDAC Manual 25.4.15 - 0AMIT KUSHWAHANo ratings yet
- Presentation On CEL SSDAC PDFDocument506 pagesPresentation On CEL SSDAC PDFPrince Shah83% (6)
- DatasheetDocument9 pagesDatasheetjim campbellNo ratings yet
- Research On Servo Motor Motion Control System BaseDocument8 pagesResearch On Servo Motor Motion Control System BaseAhmed AliNo ratings yet
- 9Ch NMEA (Serial) Ethernet GatewayDocument16 pages9Ch NMEA (Serial) Ethernet GatewayEvgeny YudinNo ratings yet
- Gates BC 1T Transmitter 1958Document71 pagesGates BC 1T Transmitter 1958Nelson Suárez GarzónNo ratings yet
- 3Y11 FullDocument24 pages3Y11 FulltodorloncarskiNo ratings yet
- Project Report One MbddedDocument28 pagesProject Report One MbddedashishNo ratings yet
- Service Manual SONY DCR-HC23EHC24EHC26HC26EHC35EDocument60 pagesService Manual SONY DCR-HC23EHC24EHC26HC26EHC35Eelotillo100% (2)
- Getting Started With UART Using EUSART On PIC18 90003282ADocument29 pagesGetting Started With UART Using EUSART On PIC18 90003282ADaniNo ratings yet
- Release Notes Pic24 Dspic Pic32mm v1 171 1Document14 pagesRelease Notes Pic24 Dspic Pic32mm v1 171 1DaniNo ratings yet
- A1171 DatasheetDocument10 pagesA1171 DatasheetDaniNo ratings yet
- 74aup1g74 Q100-2937296Document21 pages74aup1g74 Q100-2937296DaniNo ratings yet
- 74aup1g74 Q100-2937296Document21 pages74aup1g74 Q100-2937296DaniNo ratings yet
- T HR Rs 13001 ST v2.0Document25 pagesT HR Rs 13001 ST v2.0DaniNo ratings yet
- Matlab - XPC Target Selecting Hardware GuideDocument52 pagesMatlab - XPC Target Selecting Hardware GuideDaniNo ratings yet
- Critical Embedded Systems for Rail Transport SafetyDocument82 pagesCritical Embedded Systems for Rail Transport SafetyDaniNo ratings yet
- IEEE STD 1474.1-2004 CBTC Performance and Functional RequirementsDocument55 pagesIEEE STD 1474.1-2004 CBTC Performance and Functional RequirementsDani100% (1)
- EED 5 Unit 8Document45 pagesEED 5 Unit 8Reinaliza FerraroNo ratings yet
- Statistics: Continuous VariablesDocument13 pagesStatistics: Continuous VariablesmchstpNo ratings yet
- Apr24-3g CDocument4 pagesApr24-3g COscar Payan ViamonteNo ratings yet
- AnInvestigationofPhaetonPlanetIIwrite Upv2Document14 pagesAnInvestigationofPhaetonPlanetIIwrite Upv2Divine Zen Love GoddessNo ratings yet
- TEK 12-6 Reinforcement & Connectors (2007)Document6 pagesTEK 12-6 Reinforcement & Connectors (2007)B0B_PNo ratings yet
- Previous Year Questions - Polynomials - Notes - Class 10Document6 pagesPrevious Year Questions - Polynomials - Notes - Class 10Azhaan ParyNo ratings yet
- Answer All The Questions Section A.: True of Science?Document4 pagesAnswer All The Questions Section A.: True of Science?hyeazsNo ratings yet
- PHT3D Tutorial: Pyrite Oxidation ModelingDocument32 pagesPHT3D Tutorial: Pyrite Oxidation ModelingluisgeologoNo ratings yet
- Semi-Final Test - Math7-Math10Document10 pagesSemi-Final Test - Math7-Math10JUVELYN BELLITANo ratings yet
- Research Paper: Jimmy Persson (pt98jpr) Gustav Evertsson (Pt99gev) Blekinge Institute of Technology, SwedenDocument10 pagesResearch Paper: Jimmy Persson (pt98jpr) Gustav Evertsson (Pt99gev) Blekinge Institute of Technology, SwedenAnjali SoniNo ratings yet
- Hkimo 2022 Heat Round - p4Document5 pagesHkimo 2022 Heat Round - p4Marsella NadjamoeddinNo ratings yet
- RMM 31 FINAL - CompressedDocument117 pagesRMM 31 FINAL - CompressedSong BeeNo ratings yet
- Cable 4 PDFDocument46 pagesCable 4 PDFmuhammadshafiq69No ratings yet
- Simulation of Crack Propagation in Rock in Plasma Blasting TechnologyDocument16 pagesSimulation of Crack Propagation in Rock in Plasma Blasting Technologybenicillo0% (1)
- Heat Transfer Intro-Chapter 1Document41 pagesHeat Transfer Intro-Chapter 1yaqoobNo ratings yet
- Horizontal Axis Wind Turbines Passive Flow Control Methods: A ReviewDocument18 pagesHorizontal Axis Wind Turbines Passive Flow Control Methods: A ReviewHavaldar, SanjayNo ratings yet
- ASME B18.3.2M-1979 Metric Series Hexagon Keys and BitsDocument11 pagesASME B18.3.2M-1979 Metric Series Hexagon Keys and Bitshcsharma1967No ratings yet
- PVTSim Method Documentation by CALSEPDocument179 pagesPVTSim Method Documentation by CALSEPAnonymous Vbv8SHv0bNo ratings yet
- SAIVEERA ACADEMY’S GUIDE TO 12TH CHEMISTRY UNIT 1 METALLURGYDocument26 pagesSAIVEERA ACADEMY’S GUIDE TO 12TH CHEMISTRY UNIT 1 METALLURGYKrish Krishn100% (1)
- Renewable and Sustainable Energy ReviewsDocument13 pagesRenewable and Sustainable Energy ReviewsMohammadreza MalekMohamadiNo ratings yet
- Controlled Atmosphere StorageDocument9 pagesControlled Atmosphere StorageAnaniah BlessingNo ratings yet
- Heraeus Multifuge 4KR-User ManualDocument109 pagesHeraeus Multifuge 4KR-User ManualvaltbattNo ratings yet
- Tanner Tools v16.0 Release NotesDocument14 pagesTanner Tools v16.0 Release NotesPareve SolanoNo ratings yet
- Fe-C Phase Transformations and Hardening of SteelDocument21 pagesFe-C Phase Transformations and Hardening of SteelchenshicatherineNo ratings yet
- You Can Do The CubeDocument16 pagesYou Can Do The Cubedeborahmorton100% (1)
- Sequencing Catalog SupplementDocument10 pagesSequencing Catalog SupplementhassamjNo ratings yet
- Bagi Yang Masih Awam Memakai Google Sheet, File Ini Bisa Didownload Dengan Klik File Download MS. ExcelDocument67 pagesBagi Yang Masih Awam Memakai Google Sheet, File Ini Bisa Didownload Dengan Klik File Download MS. Excelwisnu pranata adhiNo ratings yet
- Appendix ADocument13 pagesAppendix Ajuha04No ratings yet
- Video Surveillance 2012 MailDocument76 pagesVideo Surveillance 2012 MailcoreloneNo ratings yet
- Business Process Mapping: Improving Customer SatisfactionFrom EverandBusiness Process Mapping: Improving Customer SatisfactionRating: 5 out of 5 stars5/5 (1)
- A Step By Step Guide: How to Perform Risk Based Internal Auditing for Internal Audit BeginnersFrom EverandA Step By Step Guide: How to Perform Risk Based Internal Auditing for Internal Audit BeginnersRating: 4.5 out of 5 stars4.5/5 (11)
- (ISC)2 CISSP Certified Information Systems Security Professional Official Study GuideFrom Everand(ISC)2 CISSP Certified Information Systems Security Professional Official Study GuideRating: 2.5 out of 5 stars2.5/5 (2)
- GDPR-standard data protection staff training: What employees & associates need to know by Dr Paweł MielniczekFrom EverandGDPR-standard data protection staff training: What employees & associates need to know by Dr Paweł MielniczekNo ratings yet
- The Layman's Guide GDPR Compliance for Small Medium BusinessFrom EverandThe Layman's Guide GDPR Compliance for Small Medium BusinessRating: 5 out of 5 stars5/5 (1)
- Audit. Review. Compilation. What's the Difference?From EverandAudit. Review. Compilation. What's the Difference?Rating: 5 out of 5 stars5/5 (1)
- Financial Statement Fraud Casebook: Baking the Ledgers and Cooking the BooksFrom EverandFinancial Statement Fraud Casebook: Baking the Ledgers and Cooking the BooksRating: 4 out of 5 stars4/5 (1)
- Electronic Health Records: An Audit and Internal Control GuideFrom EverandElectronic Health Records: An Audit and Internal Control GuideNo ratings yet
- A Pocket Guide to Risk Mathematics: Key Concepts Every Auditor Should KnowFrom EverandA Pocket Guide to Risk Mathematics: Key Concepts Every Auditor Should KnowNo ratings yet
- GDPR for DevOp(Sec) - The laws, Controls and solutionsFrom EverandGDPR for DevOp(Sec) - The laws, Controls and solutionsRating: 5 out of 5 stars5/5 (1)
- Audit and Assurance Essentials: For Professional Accountancy ExamsFrom EverandAudit and Assurance Essentials: For Professional Accountancy ExamsNo ratings yet
- Executive Roadmap to Fraud Prevention and Internal Control: Creating a Culture of ComplianceFrom EverandExecutive Roadmap to Fraud Prevention and Internal Control: Creating a Culture of ComplianceRating: 4 out of 5 stars4/5 (1)