You might also like
- Battery Stack Monitor Maximizes Performance of Li Ion Batteries in Hybrid and Electric VehiclesDocument6 pagesBattery Stack Monitor Maximizes Performance of Li Ion Batteries in Hybrid and Electric VehiclesQuang Linh LêNo ratings yet
- Smart Battery Management System With Active Cell BalancingDocument6 pagesSmart Battery Management System With Active Cell BalancingNyk MunNo ratings yet
- Bms Research PaperDocument4 pagesBms Research PaperMohit KumarNo ratings yet
- Minor Project Report BmsDocument26 pagesMinor Project Report BmsAditya MishraNo ratings yet
- Shekhar Malani - BMS For EVDocument19 pagesShekhar Malani - BMS For EVvarun sharma100% (1)
- 25781-Designing Battery Management Systems PDFDocument5 pages25781-Designing Battery Management Systems PDFAnonymous ZRyj23t36b100% (2)
- Mohammed 2017Document9 pagesMohammed 2017Vinu KohliNo ratings yet
- Battery Management System Prop R1 092611Document26 pagesBattery Management System Prop R1 092611jashwanthmekalaNo ratings yet
- MaxEye BMS HIL Test System White Paper V1 2Document9 pagesMaxEye BMS HIL Test System White Paper V1 2ahmedhamdi731No ratings yet
- Digital Battery Management Design For Point-Of-Load Applications With Cell BalancingDocument11 pagesDigital Battery Management Design For Point-Of-Load Applications With Cell Balancingimanzoor1356No ratings yet
- Maximizing Cell Monitoring Accuracy and Data Integrity in Energy Storage Battery Management SystemsDocument10 pagesMaximizing Cell Monitoring Accuracy and Data Integrity in Energy Storage Battery Management SystemsbatuhanNo ratings yet
- Battery Management System For Electric Vehicle ApplicationDocument5 pagesBattery Management System For Electric Vehicle ApplicationkhasimNo ratings yet
- Artificial Intelligence-Based Battery Management Systems For Li-Ion BatteriesDocument14 pagesArtificial Intelligence-Based Battery Management Systems For Li-Ion BatteriesTJPRC PublicationsNo ratings yet
- A Battery Management System Using An Active Charge Equalization Technique Based On A DC - DC Converter TopologyDocument10 pagesA Battery Management System Using An Active Charge Equalization Technique Based On A DC - DC Converter TopologyFaiz MajeedNo ratings yet
- A Battery Management System Using An Active Charge Equalization Technique Based On A DC/DC Converter TopologyDocument8 pagesA Battery Management System Using An Active Charge Equalization Technique Based On A DC/DC Converter TopologyNyk MunNo ratings yet
- Ashwoods Battery Management SystemDocument6 pagesAshwoods Battery Management SystemChittaranjan BaralNo ratings yet
- Battery Management System: Interfacing Between An ESS and A Mi-CrogridDocument16 pagesBattery Management System: Interfacing Between An ESS and A Mi-CrogridramezhosnyNo ratings yet
- Minor Project 5th Sem ReportDocument25 pagesMinor Project 5th Sem ReportAditya MishraNo ratings yet
- Battery Management System For Cell Balancing in AnDocument6 pagesBattery Management System For Cell Balancing in Ansinghutkarsh03358No ratings yet
- Designing A New Generalized Battery Management SystemDocument10 pagesDesigning A New Generalized Battery Management SystemRajIsacNo ratings yet
- Smart Battery White PaperDocument10 pagesSmart Battery White PaperKranthi KumarNo ratings yet
- W6 Battery Technology 2Document38 pagesW6 Battery Technology 2randy ramadhanNo ratings yet
- A Look Inside Battery Management SystemsDocument8 pagesA Look Inside Battery Management SystemsJitesh PatelNo ratings yet
- (2010) A Grid-Tie Battery Energy Storage SystemDocument5 pages(2010) A Grid-Tie Battery Energy Storage Systemabc1231234454252452342No ratings yet
- Battery Management System (BMS) Simulation Environment For Electric VehiclesDocument6 pagesBattery Management System (BMS) Simulation Environment For Electric VehiclesNavanath MahadikNo ratings yet
- Design of A Reconfigurable Li-Ion Battery Management System (BMS)Document7 pagesDesign of A Reconfigurable Li-Ion Battery Management System (BMS)jaluadiNo ratings yet
- Intelligent Battery Management System Analyzing & Optimizing of Multicell Battery VoltageDocument3 pagesIntelligent Battery Management System Analyzing & Optimizing of Multicell Battery Voltageeditor_ijtelNo ratings yet
- Upf PresentationDocument30 pagesUpf PresentationAnupam Gajendra Narayan ChoudharyNo ratings yet
- Introduction To Electric Vehicle Battery Systems - Technical ArticlesDocument5 pagesIntroduction To Electric Vehicle Battery Systems - Technical ArticlesMoorthy subramanianNo ratings yet
- Energies: Battery Management Systems in Electric and Hybrid VehiclesDocument18 pagesEnergies: Battery Management Systems in Electric and Hybrid Vehiclesavi0341No ratings yet
- Energies: Battery Management Systems in Electric and Hybrid VehiclesDocument18 pagesEnergies: Battery Management Systems in Electric and Hybrid Vehiclesdharmendra patelNo ratings yet
- Report On Lecture 32Document5 pagesReport On Lecture 32Surajit SahaNo ratings yet
- p356 En-SocDocument5 pagesp356 En-Socscorpion2001glaNo ratings yet
- Low-Power Design Guide: Authors: Brant Ivey Microchip Technology IncDocument22 pagesLow-Power Design Guide: Authors: Brant Ivey Microchip Technology InctzofNo ratings yet
- DN000092.G S Series BMS Data SheetDocument26 pagesDN000092.G S Series BMS Data SheetReetwan SarkarNo ratings yet
- Validation of A Battery Management System Based OnDocument9 pagesValidation of A Battery Management System Based OnAbdallah EssamNo ratings yet
- A New Cell-to-Cell Fast Balancing Circuit For Lithium-Ion Batteries in Electric Vehicles and Energy Storage SystemDocument5 pagesA New Cell-to-Cell Fast Balancing Circuit For Lithium-Ion Batteries in Electric Vehicles and Energy Storage SystemSanjana RoseNo ratings yet
- EVDocument31 pagesEVChiliveri VinodNo ratings yet
- 2016-ASPDAC-Distributed Reconfigurable Battery System Management ArchitecturesDocument6 pages2016-ASPDAC-Distributed Reconfigurable Battery System Management ArchitecturesBharath Y.K.No ratings yet
- Battery Management System in Electric Vehicle: Mr. Rohit S. Dhaigude, Mr. Javed H. ShaikhDocument5 pagesBattery Management System in Electric Vehicle: Mr. Rohit S. Dhaigude, Mr. Javed H. ShaikhJagdish ThakurNo ratings yet
- Car Lucho 2018Document6 pagesCar Lucho 2018Abhishek Kumar TripathiNo ratings yet
- Auxiliary DC Control PowerDocument12 pagesAuxiliary DC Control PowerCarlos MartinezNo ratings yet
- BMS Issues in Electric-Powered ApplicationDocument19 pagesBMS Issues in Electric-Powered Applicationmuhammad samrozNo ratings yet
- Digital Twin Based Battery Management System - A ReviewDocument5 pagesDigital Twin Based Battery Management System - A ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 6274 AuxDCControl MT 20070207 WebDocument13 pages6274 AuxDCControl MT 20070207 WebNad EemNo ratings yet
- Ieee Argencon 2016 Paper 94Document6 pagesIeee Argencon 2016 Paper 94ademargcjuniorNo ratings yet
- Engineering Guide Custom Battery PacksDocument16 pagesEngineering Guide Custom Battery PacksAndrew PNo ratings yet
- Battery Management SystemDocument4 pagesBattery Management Systemkoushik94No ratings yet
- Brochure Octopus SeriesDocument12 pagesBrochure Octopus SeriesRafael ReisNo ratings yet
- Battery ChargerDocument43 pagesBattery ChargerAhmed SheirNo ratings yet
- Design of A Reconfigurable Li-Ion Battery Management System (BMS)Document7 pagesDesign of A Reconfigurable Li-Ion Battery Management System (BMS)ingo ingoNo ratings yet
- AIN17 - Passive Balancing Battery Management System Using MOSFETs As Balancing Resistor - F.bunDocument5 pagesAIN17 - Passive Balancing Battery Management System Using MOSFETs As Balancing Resistor - F.bunCostache CatalinNo ratings yet
- (2011) A High-Efficiency Grid-Tie Battery Energy Storage SystemDocument11 pages(2011) A High-Efficiency Grid-Tie Battery Energy Storage Systemabc1231234454252452342No ratings yet
- Simulative Comparison of Balancing Algorithms For Active and Passive Cell Balancing Systems For Lithium-Ion BatteriesDocument9 pagesSimulative Comparison of Balancing Algorithms For Active and Passive Cell Balancing Systems For Lithium-Ion BatteriesZainul MuttaqiNo ratings yet
- Chapter-1: 1) Electrical Vehicle BatteryDocument42 pagesChapter-1: 1) Electrical Vehicle BatteryShivani AndhaleNo ratings yet
- Battery Management SystemDocument55 pagesBattery Management Systemanshiisingh2808No ratings yet
- T1 1 E Automotive 072Document15 pagesT1 1 E Automotive 072Marian OstrowskiNo ratings yet
- Gain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipFrom EverandGain-Cell Embedded DRAMs for Low-Power VLSI Systems-on-ChipNo ratings yet
- Best ML Packages in RDocument9 pagesBest ML Packages in Rkunalc-1No ratings yet
- 5 Heating SystemsDocument29 pages5 Heating Systemsventus13No ratings yet
- BSS Student Portal User ManualDocument13 pagesBSS Student Portal User ManualMaheshNo ratings yet
- CrO3 Alternatives in Decorative and Functional PlatingDocument22 pagesCrO3 Alternatives in Decorative and Functional PlatingLukeNo ratings yet
- C++ Cheat SheetDocument9 pagesC++ Cheat SheetAddele CruzNo ratings yet
- DSE9701 & DSE9702: Vertical 5 Amp Battery ChargersDocument2 pagesDSE9701 & DSE9702: Vertical 5 Amp Battery Chargersasuhuane100% (1)
- Vpsa O2 Systems Brochure ML IND0032Document8 pagesVpsa O2 Systems Brochure ML IND0032kalaiNo ratings yet
- MGD 2621 P Medical Greyscale Display: Installation & User ManualDocument27 pagesMGD 2621 P Medical Greyscale Display: Installation & User ManualJohn SmithNo ratings yet
- Simulacion Numérica de Cuchara PeltonDocument5 pagesSimulacion Numérica de Cuchara PeltonOscar Choque JaqquehuaNo ratings yet
- Hrvatski Registar Civilnih ZrakoplovaDocument22 pagesHrvatski Registar Civilnih ZrakoplovaIvo JosipNo ratings yet
- en 30 - Sub Supplier - ManagementDocument2 pagesen 30 - Sub Supplier - ManagementAMB SpainNo ratings yet
- Liebherr FCC 230 DatasheetDocument3 pagesLiebherr FCC 230 DatasheetAnderson BaziaNo ratings yet
- Working Principle of Submersible PumpDocument5 pagesWorking Principle of Submersible PumpSatinder saini100% (1)
- Oracle® SQL Developer: Data Modeler Accessibility GuideDocument10 pagesOracle® SQL Developer: Data Modeler Accessibility Guidecarlosand78No ratings yet
- Colores: (Phila: in Praesentia)Document32 pagesColores: (Phila: in Praesentia)Gustavo NunesNo ratings yet
- Paint Master Slurry - TDSDocument2 pagesPaint Master Slurry - TDSMichael JoudalNo ratings yet
- Testo 622 Data SheetDocument2 pagesTesto 622 Data SheetMochammad Zaki NasrullohNo ratings yet
- Senior DesignI Fall 2014 IntroductionDocument31 pagesSenior DesignI Fall 2014 IntroductionSarah WilliamsNo ratings yet
- DCOM Lab ManualDocument45 pagesDCOM Lab ManualSyeda InaasNo ratings yet
- The Air Interface For GSM EDGEDocument6 pagesThe Air Interface For GSM EDGEDayanidhi PandaNo ratings yet
- M18 Onefhiwf34Document3 pagesM18 Onefhiwf34winduNo ratings yet
- SA Model Paper Solutions - III SemesterDocument23 pagesSA Model Paper Solutions - III Semesterkotireddy.vaishnaviNo ratings yet
- PCB Design TutorialDocument25 pagesPCB Design TutorialMadhu Mangal KumarNo ratings yet
- Low-Cost Hardware Profiling of Run-Time and Energy in FPGA Embedded ProcessorsDocument8 pagesLow-Cost Hardware Profiling of Run-Time and Energy in FPGA Embedded ProcessorssavantkNo ratings yet
- Demountable Flares DatasheetDocument2 pagesDemountable Flares Datasheetmanojeil1No ratings yet
- CEH v8 Labs Module 02 Footprinting and ReconnaissanceDocument85 pagesCEH v8 Labs Module 02 Footprinting and ReconnaissancenazaNo ratings yet
- 2001 ME Thesis PapersDocument53 pages2001 ME Thesis Papersazd1973No ratings yet
- Schosinsky PDFDocument13 pagesSchosinsky PDFDnl Castillo MuñozNo ratings yet
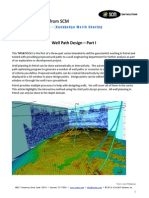
- SCM Well Path Design Part IDocument9 pagesSCM Well Path Design Part IPeter LeOn LeOnNo ratings yet
- Application ModernizationDocument2 pagesApplication ModernizationLászló DianNo ratings yet