You might also like
- Analysis and Design of A Multiple Feedback Loop Control Strategy For 1P Voltage-Source UPS Inverters (IEEE-TPE)Document10 pagesAnalysis and Design of A Multiple Feedback Loop Control Strategy For 1P Voltage-Source UPS Inverters (IEEE-TPE)Al Bajad MamadNo ratings yet
- Buck, Boost and Buck-Boost Inverter ComparisonDocument6 pagesBuck, Boost and Buck-Boost Inverter ComparisonIndra PratamaNo ratings yet
- Analysis and Design of A Multiple Feedback Loop Control Strategy For Single-Phase Voltage-Source UPS InvertersDocument10 pagesAnalysis and Design of A Multiple Feedback Loop Control Strategy For Single-Phase Voltage-Source UPS InvertersMary NdhlovuNo ratings yet
- Slidin Mode Research PaperDocument33 pagesSlidin Mode Research PaperAnimesh JainNo ratings yet
- Trafo Parallel OpnDocument8 pagesTrafo Parallel OpnPaulraj JawaharNo ratings yet
- (22559159 - Electrical, Control and Communication Engineering) Current Sensorless Control Algorithm For Single-Phase Three-Level NPC InverterDocument6 pages(22559159 - Electrical, Control and Communication Engineering) Current Sensorless Control Algorithm For Single-Phase Three-Level NPC InverterRaghunandan SubramanianNo ratings yet
- Chaos Study and Parameter-Space Analysis of TheDocument13 pagesChaos Study and Parameter-Space Analysis of TheVisu TamilNo ratings yet
- FACTS Flexible Alternating Current Transmission SystemsDocument31 pagesFACTS Flexible Alternating Current Transmission SystemsSoumia É LècNo ratings yet
- Cuk Control PDFDocument57 pagesCuk Control PDFPraveen PJNo ratings yet
- Optimal Control of Three-Phase PWM Inverter For UPS Systems: Keyhani.1@osu - EduDocument6 pagesOptimal Control of Three-Phase PWM Inverter For UPS Systems: Keyhani.1@osu - EdursrtnjNo ratings yet
- Optimal Volt/var Control in Distribution Systems: Yutian Liu, Peng Zhang, Xizhao QiuDocument6 pagesOptimal Volt/var Control in Distribution Systems: Yutian Liu, Peng Zhang, Xizhao QiuChetan MishraNo ratings yet
- 2011 - Control of A DCDC Converter by Fuzzy Controller For A Solar Pumping System - Paper N. Mazouz, A. MidounDocument8 pages2011 - Control of A DCDC Converter by Fuzzy Controller For A Solar Pumping System - Paper N. Mazouz, A. MidounBoruziaNo ratings yet
- Comparison of PWM Voltage Vs Current Mode Control Vs Hysteretic ModeDocument6 pagesComparison of PWM Voltage Vs Current Mode Control Vs Hysteretic ModeBai Nguyen NoiNo ratings yet
- Vector Control For PMSMDocument7 pagesVector Control For PMSMjaivalbNo ratings yet
- Modelling and Simulation of Static Var Compensator with MatlabDocument6 pagesModelling and Simulation of Static Var Compensator with MatlabYasir AmmarNo ratings yet
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetFrom EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo ratings yet
- Application of Simple Adaptive Control To A DC DC Boost Converter With Load Variation Iccas-Sice09 GoojongDocument6 pagesApplication of Simple Adaptive Control To A DC DC Boost Converter With Load Variation Iccas-Sice09 GoojongAMIR SOHAILNo ratings yet
- Modelling and Controlling of UPFC for Power System StudiesDocument7 pagesModelling and Controlling of UPFC for Power System StudiesAbdel-Rahman Saifedin ArandasNo ratings yet
- Analysis and Design of A Multiple Feedback Loop Control Strategy For Single Phase Voltage Source UPS InvertersDocument10 pagesAnalysis and Design of A Multiple Feedback Loop Control Strategy For Single Phase Voltage Source UPS InvertersFelipeFalconiNo ratings yet
- A D-Q Synchronous Frame Controller For Single Phase InverterDocument7 pagesA D-Q Synchronous Frame Controller For Single Phase InvertershanNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document7 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Novel Technology For Digital Controlled UPS Inverter: ReviewDocument6 pagesNovel Technology For Digital Controlled UPS Inverter: ReviewDhuvi LuvioNo ratings yet
- Complex Vector Control of A Unified Power Flow ControllerDocument8 pagesComplex Vector Control of A Unified Power Flow ControllerpongpumNo ratings yet
- International Conference on Innovations in Information Embedded and Communication SystemsDocument6 pagesInternational Conference on Innovations in Information Embedded and Communication SystemsMk PandiyanNo ratings yet
- Advanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterDocument21 pagesAdvanced Single-Loop Discrete-Time Control For T-Type Voltage Source InverterBá Linh NguyễnNo ratings yet
- Investigation of A Unified Power Flow Controller: AbstractDocument9 pagesInvestigation of A Unified Power Flow Controller: AbstractChaibHabibNo ratings yet
- Modeling and Analysis of DC-DC Converters Under Pulse Skipping ModulationDocument6 pagesModeling and Analysis of DC-DC Converters Under Pulse Skipping Modulationad duybgNo ratings yet
- ELEC4612-12 Exp 2 Power FlowDocument5 pagesELEC4612-12 Exp 2 Power FlowDavid VangNo ratings yet
- Parallel Transformers by Circulating Current MethodDocument16 pagesParallel Transformers by Circulating Current MethodDamjan Sculac100% (1)
- UPFC Vector Control InvestigationDocument9 pagesUPFC Vector Control InvestigationChaibHabibNo ratings yet
- Simulation of Upqc FileDocument11 pagesSimulation of Upqc FiledineshprocksNo ratings yet
- Step by Step Ieee AWESOMEDocument6 pagesStep by Step Ieee AWESOMESimon Pedro Aguilar RiosNo ratings yet
- Power Quality Analysis of Traction Supply SystemsDocument5 pagesPower Quality Analysis of Traction Supply SystemsHershal RockksNo ratings yet
- Final DVSA2 Merged OrganizedDocument16 pagesFinal DVSA2 Merged Organizedkakkunuru kashyapNo ratings yet
- Sliding Mode Control of Vienna Rectifier With Output Voltage ControlDocument7 pagesSliding Mode Control of Vienna Rectifier With Output Voltage ControlInternational Journal of Latest Research in Engineering and TechnologyNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Impact of The ULTC On The Dynamic Voltage Collapse of An Electric Power System With Large Scale of Wind GenerationDocument6 pagesImpact of The ULTC On The Dynamic Voltage Collapse of An Electric Power System With Large Scale of Wind GenerationSUDIPTA DATTANo ratings yet
- Lecture 14: Contingency Analysis, Sensitivity MethodsDocument38 pagesLecture 14: Contingency Analysis, Sensitivity MethodsXahid YousafNo ratings yet
- Power Flow Analysis of Power System Embedded With Upfc Using Psasp ProgramDocument5 pagesPower Flow Analysis of Power System Embedded With Upfc Using Psasp ProgramMahesh ShirsatNo ratings yet
- Assignment: PV Powered LED Street Light With Perturb-And Observe MPPT EEE6008 Solar Photo Voltaic Systems Submitted byDocument9 pagesAssignment: PV Powered LED Street Light With Perturb-And Observe MPPT EEE6008 Solar Photo Voltaic Systems Submitted byACADEMIC MAILNo ratings yet
- F331 English IranArzeDocument6 pagesF331 English IranArzeedynperuNo ratings yet
- LMI Robust Control Design For Boost PWM Converters: C. Olalla R. Leyva A. El Aroudi P. Garce S I. QueinnecDocument11 pagesLMI Robust Control Design For Boost PWM Converters: C. Olalla R. Leyva A. El Aroudi P. Garce S I. QueinnecVinícius BaconNo ratings yet
- Design and Implementation Three-Arms Rectifier Inverter of A Single PhaseDocument6 pagesDesign and Implementation Three-Arms Rectifier Inverter of A Single Phasecelo81No ratings yet
- Flow Analysis and Calculation of AC/DC Power System Based On MATLAB and PSASPDocument6 pagesFlow Analysis and Calculation of AC/DC Power System Based On MATLAB and PSASPAbdulrahmanNo ratings yet
- Full-Order Terminal Sliding Mode Control For Boost ConverterDocument5 pagesFull-Order Terminal Sliding Mode Control For Boost ConverterAbderrahman LahouaouiNo ratings yet
- Ybus Matrix with Regulating TransformersDocument21 pagesYbus Matrix with Regulating TransformersSankar MuthuswamyNo ratings yet
- Vector ControlDocument5 pagesVector Controlapi-26587237No ratings yet
- Design and Implementation of Parallel Connected DC-DC Buck ConvertersDocument6 pagesDesign and Implementation of Parallel Connected DC-DC Buck ConvertersIJARTETNo ratings yet
- A DC Motor Driven by A DC/DC Boost Converter-Inverter: Modeling and SimulationDocument6 pagesA DC Motor Driven by A DC/DC Boost Converter-Inverter: Modeling and SimulationAlex VincentNo ratings yet
- PSSEDocument6 pagesPSSESyed Faizan AliNo ratings yet
- Family Controller PFCDocument8 pagesFamily Controller PFCWesley de PaulaNo ratings yet
- Report On Workshop: Submitted byDocument54 pagesReport On Workshop: Submitted byrajimuruganNo ratings yet
- Alternator Regulation (E.M.F. & M.M.F. Methods) : 1. ObjectDocument8 pagesAlternator Regulation (E.M.F. & M.M.F. Methods) : 1. Objectsajd abbasNo ratings yet
- Basic Matrix ConverterDocument6 pagesBasic Matrix ConverterSaranya MenonNo ratings yet
- Control of Indirect Matrix Converter Under Unbalanced Source Voltage and Load Current ConditionsDocument7 pagesControl of Indirect Matrix Converter Under Unbalanced Source Voltage and Load Current Conditionssweetu_adit_eeNo ratings yet
- Controlled Rectifier Single Phase Full WaveDocument7 pagesControlled Rectifier Single Phase Full WaveJesus BecerraNo ratings yet
- Master-Slave Sliding Control of Parallel InvertersDocument8 pagesMaster-Slave Sliding Control of Parallel Invertersvirus101No ratings yet
- A Fixed Frequency Dual-Mode DC-DC Buck Converter With Fast-Transient Response and High Efficiency Over A Wide Load RangeDocument6 pagesA Fixed Frequency Dual-Mode DC-DC Buck Converter With Fast-Transient Response and High Efficiency Over A Wide Load RangeskrtamilNo ratings yet
- Droop ControlDocument3 pagesDroop Controlleo232100% (1)
- Software FIssionDocument2 pagesSoftware FIssionDaniel Palomares GNo ratings yet
- IJE - 1 (Es Articulo Tambien) Control Strategy For Single-Phase PWM Acdc Voltage-Source ConvertersDocument15 pagesIJE - 1 (Es Articulo Tambien) Control Strategy For Single-Phase PWM Acdc Voltage-Source ConvertersDaniel Palomares GNo ratings yet
- Model Predictive Control Of3-Level NPC ACIDC PWM Converter For DC Distribution Using LCL FilterDocument6 pagesModel Predictive Control Of3-Level NPC ACIDC PWM Converter For DC Distribution Using LCL FilterDaniel Palomares GNo ratings yet
- Hysteresis Band Current Control For A Single Phase Z-Source Inverter With Symmetrical and Asymmetrical Z-NetworkDocument6 pagesHysteresis Band Current Control For A Single Phase Z-Source Inverter With Symmetrical and Asymmetrical Z-NetworkDaniel Palomares GNo ratings yet
- His Teres IsDocument497 pagesHis Teres IsDaniel Palomares GNo ratings yet
- Model Predictive Control Ofpv-Based Shunt Active Power Filter in Single Phase Low Voltage Grid Using Conservative Power TheoryDocument6 pagesModel Predictive Control Ofpv-Based Shunt Active Power Filter in Single Phase Low Voltage Grid Using Conservative Power TheoryDaniel Palomares GNo ratings yet
- Improved MPPT Adaptive Incremental Conductance Algorithm: Dr. Arturo Morales-Acevedo José Luis Díaz-BernabéDocument6 pagesImproved MPPT Adaptive Incremental Conductance Algorithm: Dr. Arturo Morales-Acevedo José Luis Díaz-BernabéDaniel Palomares GNo ratings yet
- PDFDocument9 pagesPDFDaniel Palomares GNo ratings yet
- 07777290Document6 pages07777290Daniel Palomares GNo ratings yet
- 07584043Document5 pages07584043Daniel Palomares GNo ratings yet
- Diseño Digital Morris Mano 3ra Edicion PDFDocument524 pagesDiseño Digital Morris Mano 3ra Edicion PDFDaniel Palomares GNo ratings yet
- A New Control Approach For Shunt Hybrid Active Power Filter To Compensate Harmonics and Dynamic Reactive Power With Grid InterconnectionDocument7 pagesA New Control Approach For Shunt Hybrid Active Power Filter To Compensate Harmonics and Dynamic Reactive Power With Grid InterconnectionDaniel Palomares GNo ratings yet
- 05657265Document15 pages05657265Daniel Palomares GNo ratings yet
- VHDL CookbookDocument111 pagesVHDL Cookbookcoolboyz81990No ratings yet
- 03/10/2012 03:40:35p Mirrored C:/Program Files/EAGLE-4.11/bin/tl494-sup - BRDDocument1 page03/10/2012 03:40:35p Mirrored C:/Program Files/EAGLE-4.11/bin/tl494-sup - BRDDaniel Palomares GNo ratings yet
- AUDIO STEGANOGRAPHY FOR COVERT DATADocument5 pagesAUDIO STEGANOGRAPHY FOR COVERT DATADaniel Palomares GNo ratings yet
- A Single Phase Grid Connected DC-AC Inverter With Reactive Power Control For Residential PV ApplicationDocument88 pagesA Single Phase Grid Connected DC-AC Inverter With Reactive Power Control For Residential PV ApplicationJulian De MarcosNo ratings yet
- 03/10/2012 03:36:22p Mirrored C:/Program Files/EAGLE-4.11/bin/tl494-sup - BRDDocument1 page03/10/2012 03:36:22p Mirrored C:/Program Files/EAGLE-4.11/bin/tl494-sup - BRDDaniel Palomares GNo ratings yet
- DatasheetDocument409 pagesDatasheetmicpreamp100% (1)
- 12 - Control and MonitoringDocument50 pages12 - Control and Monitoringlam266No ratings yet
- g214599 Hmod 65 Paulander DR Kitchener DWGDocument2 pagesg214599 Hmod 65 Paulander DR Kitchener DWGJhonn StevNo ratings yet
- Fuel Filter Differential Pressure Switch Circuit - Test (RENR5096)Document3 pagesFuel Filter Differential Pressure Switch Circuit - Test (RENR5096)Josip MiškovićNo ratings yet
- Oven Samsung - bf641fst - Xeh-00.01.02Document41 pagesOven Samsung - bf641fst - Xeh-00.01.02petrasi100% (4)
- Schneider MiCOM P443 H7 Line PTT User Manual ENUDocument6 pagesSchneider MiCOM P443 H7 Line PTT User Manual ENURaúlEmirGutiérrezLópezNo ratings yet
- Thermo Scientific Ramsey Oretronic III: Tramp Metal DetectorDocument2 pagesThermo Scientific Ramsey Oretronic III: Tramp Metal Detectorm2dajNo ratings yet
- Nano Bubble Product CatalogueDocument21 pagesNano Bubble Product Cataloguewijaya adidarmaNo ratings yet
- PD Instrument SDMT - PD13 Rev ADocument2 pagesPD Instrument SDMT - PD13 Rev Albk50No ratings yet
- QUINT4-PS/1AC/24DC/5: Power Supply UnitDocument50 pagesQUINT4-PS/1AC/24DC/5: Power Supply UnitOmar Alfredo Del Castillo QuispeNo ratings yet
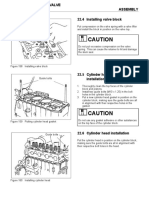
- Install and adjust cylinder head valvesDocument96 pagesInstall and adjust cylinder head valvesLudwig Levallet100% (1)
- Assessment ITIDocument9 pagesAssessment ITIKAMALJEET SINGHNo ratings yet
- Night SVG White PaperDocument3 pagesNight SVG White PaperDurgeshkumar Rajput100% (1)
- TLC4501 OpampDocument38 pagesTLC4501 OpampCartoon KidsNo ratings yet
- Converter CodanDocument258 pagesConverter CodanParvarcesju ThanatosNo ratings yet
- El2.e - 001Document2 pagesEl2.e - 001kamalNo ratings yet
- MOVING IRON INSTRUMENTS-notesDocument6 pagesMOVING IRON INSTRUMENTS-notesPurandara MalarNo ratings yet
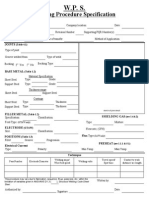
- WPS D1.3-2012 BlankDocument1 pageWPS D1.3-2012 BlankpjbedelNo ratings yet
- Halla Xpress: The Most Sought-After Luminaires in StockDocument9 pagesHalla Xpress: The Most Sought-After Luminaires in StockAlberto TorresNo ratings yet
- Ee 404 Laboratory Experiment 4Document5 pagesEe 404 Laboratory Experiment 4andrei saadNo ratings yet
- ABB TPU 4x.xx enDocument9 pagesABB TPU 4x.xx enpapashoNo ratings yet
- 2017 EMC Fundamentals GuideDocument37 pages2017 EMC Fundamentals GuidejeanneptuneNo ratings yet
- Instant Download Ebook PDF Electrical Trade Practices 1st Edition PDF ScribdDocument41 pagesInstant Download Ebook PDF Electrical Trade Practices 1st Edition PDF Scribdjames.schultz763100% (40)
- Circuit ZX 48 UDocument18 pagesCircuit ZX 48 Uopen hartig100% (3)
- Fauji Fertilizer Company Limited FFC: Ans) ADocument8 pagesFauji Fertilizer Company Limited FFC: Ans) AFarhan Azhar KhattakNo ratings yet
- Time Varying SignalsDocument17 pagesTime Varying SignalsDiego Cancino SilvaNo ratings yet
- KRN1000 EN ACM-E-0180C Modified 20170126 WDocument118 pagesKRN1000 EN ACM-E-0180C Modified 20170126 WChakiem SpeederNo ratings yet
- Data Sheet: Genset Controller, GC-1FDocument20 pagesData Sheet: Genset Controller, GC-1FoscarafonsoNo ratings yet
- Concise Operating Instructions: Frequency Converter For HOISTING - TRAVEL (Siemens)Document9 pagesConcise Operating Instructions: Frequency Converter For HOISTING - TRAVEL (Siemens)Pablo Hidalgo ValenzuelaNo ratings yet
- DC Drive Setup InstructionsDocument5 pagesDC Drive Setup InstructionsKanwal Jeet MahalNo ratings yet
- 2012 Manual Tec Nico Power WizardDocument49 pages2012 Manual Tec Nico Power WizardЕвгений_Егоров94% (17)