You might also like
- Radar Plot TexDocument42 pagesRadar Plot Texrakesh100% (1)
- RotiDocument9 pagesRotiRekha NairNo ratings yet
- Advance and TransferDocument14 pagesAdvance and TransferHelen Aiken100% (1)
- 2.7 Voyage Plan: 2.7.1 Owner's Voyage InstructionsDocument5 pages2.7 Voyage Plan: 2.7.1 Owner's Voyage InstructionsRishi100% (1)
- Chartwork ConceptDocument22 pagesChartwork Conceptantony augustineNo ratings yet
- f2 (2) (1) Reviewer Chief Officer Materials.Document20 pagesf2 (2) (1) Reviewer Chief Officer Materials.Alden Almaquer Delizo100% (1)
- Gyro Compass Errors: Static, Dynamic, Rolling, Ballistic & LatitudeDocument3 pagesGyro Compass Errors: Static, Dynamic, Rolling, Ballistic & LatitudeIvan Arcena100% (1)
- What Is Passage PlanningDocument6 pagesWhat Is Passage PlanningKrishan Perera100% (2)
- Emergency Wreck BuoyDocument15 pagesEmergency Wreck BuoysailordhillonNo ratings yet
- 13a. Rendezvous MasterDocument17 pages13a. Rendezvous MastertonyNo ratings yet
- Solutions: Grain CargoesDocument3 pagesSolutions: Grain CargoesKirtishbose Chowdhury100% (1)
- Magnetic Compass - Oral COCDocument10 pagesMagnetic Compass - Oral COCNaeem100% (1)
- AnchorDocument8 pagesAnchorwaihtet100% (1)
- Colreg Sounds All Vessel - Google SearchDocument1 pageColreg Sounds All Vessel - Google SearchCiutacu Andrei100% (1)
- 4 - ManevraDocument44 pages4 - ManevraIulian Sandru100% (1)
- Rate of Turn IndicatorDocument16 pagesRate of Turn IndicatorGlen Mac100% (1)
- 9 RA Enclosed Space EntryDocument10 pages9 RA Enclosed Space EntryHitesh SiwachNo ratings yet
- B) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsDocument6 pagesB) First Trim Correction: Trim LCF Forward of Midships LCF Aft of MidshipsCezar100% (1)
- Astronomical Position LinesDocument24 pagesAstronomical Position LinesRamachandranNo ratings yet
- Navigation 01Document8 pagesNavigation 01Khian LiNo ratings yet
- Essential Watchkeeping Guidance for Safe NavigationDocument49 pagesEssential Watchkeeping Guidance for Safe NavigationCyrus Taclob100% (1)
- Capt. Kris Askey V Mr. Adi Gupte Oow UnlimitedDocument10 pagesCapt. Kris Askey V Mr. Adi Gupte Oow UnlimitedSoul MarinerNo ratings yet
- ROTIDocument4 pagesROTIcaptyashpal100% (1)
- 1.III CargoWork Notes Rev (Dartwaykyat)Document38 pages1.III CargoWork Notes Rev (Dartwaykyat)Tun Lin NaingNo ratings yet
- Oral Sanga 2Document4 pagesOral Sanga 2TayZar1977No ratings yet
- Review InterviewDocument13 pagesReview InterviewRenz PanaliganNo ratings yet
- Simpson's Rule Formulas and ApplicationDocument29 pagesSimpson's Rule Formulas and ApplicationsivaNo ratings yet
- Parallel IndexingDocument2 pagesParallel IndexingPrinceNo ratings yet
- 05 Tropical Revolving StormsDocument21 pages05 Tropical Revolving StormsBhupinder Singh Jhajj100% (1)
- Finding Ship Positions from Lighthouse BearingsDocument9 pagesFinding Ship Positions from Lighthouse BearingswaseemNo ratings yet
- Stci CgaDocument72 pagesStci CgaRolando DumelodNo ratings yet
- Errors of Magnetic Compass and Their CorrectionsDocument10 pagesErrors of Magnetic Compass and Their Correctionsbittu692100% (2)
- SMSS-994 Answer KeyDocument3 pagesSMSS-994 Answer KeyAmir SoleimanyNo ratings yet
- Solving Allowing ProblemsDocument111 pagesSolving Allowing ProblemsMadhish Singh100% (2)
- Navigational FormulaDocument5 pagesNavigational FormulaAvinash Nehra100% (1)
- Chief Mates Notes Part I: (For Mca Oral Examinations)Document48 pagesChief Mates Notes Part I: (For Mca Oral Examinations)Thwin Yar Zar Phyo100% (1)
- Nav 4Document59 pagesNav 4Francis AbatNo ratings yet
- Gyro 1 PDFDocument11 pagesGyro 1 PDFAakarSingh100% (1)
- Aneroid BarometerDocument23 pagesAneroid BarometerParminder singh parmarNo ratings yet
- Constant radius turn sketchDocument2 pagesConstant radius turn sketchLalitRatheeNo ratings yet
- Nav Final-CoverageDocument9 pagesNav Final-CoverageJovz100% (2)
- 3 Stars Suitable For Sight NotesDocument4 pages3 Stars Suitable For Sight NotesAjayPal SranNo ratings yet
- 1570017926solved Numericals Trim A Book 5 CH 26 Capt. SubramaniamDocument29 pages1570017926solved Numericals Trim A Book 5 CH 26 Capt. Subramaniamrk singhNo ratings yet
- Past Question Papers Numericals Solved Jan 07 To July 16 Capt. Rohit PandeyDocument245 pagesPast Question Papers Numericals Solved Jan 07 To July 16 Capt. Rohit PandeyGlen MacNo ratings yet
- The Marine ChronometerDocument3 pagesThe Marine ChronometerGiorgi Kandelaki0% (1)
- Nicholls Concise Guide To NavigationDocument1 pageNicholls Concise Guide To NavigationAhmad Raza50% (4)
- Essential Guidelines for Safe Anchoring and Mooring OperationsDocument7 pagesEssential Guidelines for Safe Anchoring and Mooring OperationsyeimiNo ratings yet
- Capt. K.K.Sharma Questions and AnswersDocument49 pagesCapt. K.K.Sharma Questions and AnswersAbu Syeed Md. Aurangzeb Al Masum100% (1)
- Parametric Roll: Large, Quickly Generated Roll Angles in Head/Stern SeasDocument3 pagesParametric Roll: Large, Quickly Generated Roll Angles in Head/Stern SeasDnv BaileyNo ratings yet
- Lesson 3: Perform Manual Radar PlottingDocument6 pagesLesson 3: Perform Manual Radar PlottingDennis DoronilaNo ratings yet
- Dead Reckoning PDFDocument6 pagesDead Reckoning PDFChiazor KevinNo ratings yet
- Introduction To Rendezvous Least TimeDocument28 pagesIntroduction To Rendezvous Least TimecicileanaNo ratings yet
- Gyro Error PlanteliaDocument1 pageGyro Error PlanteliaFritz Rollon Ronolo100% (2)
- Mpa Oral Class 2Document56 pagesMpa Oral Class 2Shoaib hossainNo ratings yet
- Kolkata MMD Func 1 Oral Question-FlattenedDocument26 pagesKolkata MMD Func 1 Oral Question-FlattenedNaresh100% (1)
- Marine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersFrom EverandMarine Gyro-Compasses and Automatic Pilots: A Handbook for Merchant Navy OfficersRating: 5 out of 5 stars5/5 (1)
- UNIVERSITY OF P-WPS OfficeDocument14 pagesUNIVERSITY OF P-WPS Officechyauyang0919No ratings yet
- NAV-1 (Group 2)Document46 pagesNAV-1 (Group 2)Sancho Jr Dela TorreNo ratings yet
- Instrumentation 172Document172 pagesInstrumentation 172adarsh snija100% (1)
- CAR 66 Module 5.1 Electronic Instrument SystemDocument26 pagesCAR 66 Module 5.1 Electronic Instrument Systempontoo100% (2)
- Jobsheet P4 - Antarmuka SensorDocument8 pagesJobsheet P4 - Antarmuka SensorAzis Nur RahmatNo ratings yet
- Missed Approach Climb Gradient 3.0% Barranquilla ColombiaDocument1 pageMissed Approach Climb Gradient 3.0% Barranquilla ColombiaAlexandra DiazNo ratings yet
- King Air 350 Manual AutopilotDocument22 pagesKing Air 350 Manual AutopilotНаме СурнамеNo ratings yet
- Measuring Tools GuideDocument32 pagesMeasuring Tools GuideAtulkumarSuthar100% (1)
- Instrument Landing Automation System. AutolandDocument28 pagesInstrument Landing Automation System. AutolandprasobhNo ratings yet
- RNAV (GNSS) Approach Chart for Guaratingueté AirportDocument2 pagesRNAV (GNSS) Approach Chart for Guaratingueté AirportRicardo PalermoNo ratings yet
- InstrumentsDocument23 pagesInstrumentsajay rNo ratings yet
- The Instrument Landing System: Air Navigation NDB Approaches/Approach PlatesDocument11 pagesThe Instrument Landing System: Air Navigation NDB Approaches/Approach Platesc_s_wagon100% (1)
- France - SUP 104, 2011Document156 pagesFrance - SUP 104, 2011James BrownNo ratings yet
- LOWW - Arrival - Transition 34 - 26012023Document5 pagesLOWW - Arrival - Transition 34 - 26012023Rogelio TapieroNo ratings yet
- Bonus Motion Detector Circuit ProjectsDocument6 pagesBonus Motion Detector Circuit ProjectsevaldobarrosNo ratings yet
- Usbr1007 PDFDocument6 pagesUsbr1007 PDFQuoc BinhNo ratings yet
- PPL NavigationDocument5 pagesPPL NavigationAubrey AndresonNo ratings yet
- Fecha: 21/03/1 9 Operación de Instrumentos de Metrología, Herramientas de Ajuste y Corte ManualDocument2 pagesFecha: 21/03/1 9 Operación de Instrumentos de Metrología, Herramientas de Ajuste y Corte ManualEiner CorzoNo ratings yet
- 34 Contact Information Bendix King HoneywellDocument2 pages34 Contact Information Bendix King HoneywellBiblioteca Go AirNo ratings yet
- Avionics Serial Number & StandardDocument40 pagesAvionics Serial Number & Standardali_2331No ratings yet
- Export Katalog 2Document68 pagesExport Katalog 2BongoClownNo ratings yet
- TempDocument15 pagesTempcaoap3847No ratings yet
- FAA FPL Quick Reference Brochure (2022-09-15)Document2 pagesFAA FPL Quick Reference Brochure (2022-09-15)mog samedNo ratings yet
- Tls PDFDocument26 pagesTls PDFpatrouilledeafranceNo ratings yet
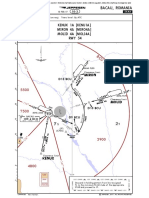
- LRBC/BCM Bacau, Romania: Kenux 1A (Kenu1A) Miron 4A (Miro4A) Molid 4A (Moli4A)Document9 pagesLRBC/BCM Bacau, Romania: Kenux 1A (Kenu1A) Miron 4A (Miro4A) Molid 4A (Moli4A)Tweed3ANo ratings yet
- SBSJ Ils-T-Rwy-16 Iac 20230223Document1 pageSBSJ Ils-T-Rwy-16 Iac 20230223Raphael Ribas MachadoNo ratings yet
- X-Plane Navigation Data For Navaids (User - Nav - Dat & Earth - Nav - Dat) File SpecificationDocument9 pagesX-Plane Navigation Data For Navaids (User - Nav - Dat & Earth - Nav - Dat) File SpecificationRon BurgundyNo ratings yet
- Fact - Ils Z RW 19 - Ils-02 10may2007Document1 pageFact - Ils Z RW 19 - Ils-02 10may2007EegullNo ratings yet
- KPDXDocument44 pagesKPDXzacklawsNo ratings yet
- 03.QSP-QC-003-Transmitter Calibration Procedure With RTD & TCDocument2 pages03.QSP-QC-003-Transmitter Calibration Procedure With RTD & TCMangesh MohiteNo ratings yet
- BSCE2D - GROUP3 - Stadia Interval Factor Inclined Stadia Sights Stadia LevelingSeatWorkDocument3 pagesBSCE2D - GROUP3 - Stadia Interval Factor Inclined Stadia Sights Stadia LevelingSeatWorkMary Grace DangtayanNo ratings yet
- #Form Master List Alat Ukur - AllDocument18 pages#Form Master List Alat Ukur - AllAzis AsmawanNo ratings yet