You might also like
- Design and Implementation of A Smart Parking System Using Iot TechnologyDocument5 pagesDesign and Implementation of A Smart Parking System Using Iot TechnologyEzzedine ShlibkNo ratings yet
- Automated Parking SystemDocument28 pagesAutomated Parking SystemVivek Jha88% (17)
- Automated Car Parking SystemDocument10 pagesAutomated Car Parking SystemMy NewsNo ratings yet
- Advanced Automatic Self Car Parking Using ArduinoDocument5 pagesAdvanced Automatic Self Car Parking Using Arduinoعمل الخيرNo ratings yet
- 3-4 Pages Abstract ReportDocument3 pages3-4 Pages Abstract ReportKoushik ThakurNo ratings yet
- Intelligent Car Parking SystemDocument8 pagesIntelligent Car Parking SystemLeo BoyNo ratings yet
- Iot-Based Smart Parking For Smart CitiesDocument6 pagesIot-Based Smart Parking For Smart CitiesAtestate LiceuNo ratings yet
- Automatic Movable Smart Road Dividers - IOT Based Solution To Traffic Congestion ProblemsDocument6 pagesAutomatic Movable Smart Road Dividers - IOT Based Solution To Traffic Congestion ProblemsInternational Journal of Innovative Science and Research Technology0% (1)
- Performance Analysis of Proximity and Light Sensors For Smart ParkingDocument8 pagesPerformance Analysis of Proximity and Light Sensors For Smart ParkingWhiteCrossesNo ratings yet
- Car Parking System Using IR Sensors: International Journal of Advance Research in Engineering, Science & TechnologyDocument4 pagesCar Parking System Using IR Sensors: International Journal of Advance Research in Engineering, Science & TechnologySaqlainNo ratings yet
- Eight Way Traffic Light Control For High Density and Minimum Travel TimeDocument4 pagesEight Way Traffic Light Control For High Density and Minimum Travel TimeinventionjournalsNo ratings yet
- Anjari 2018 IOP Conf. Ser. Mater. Sci. Eng. 384 012033Document7 pagesAnjari 2018 IOP Conf. Ser. Mater. Sci. Eng. 384 012033sas ekoNo ratings yet
- Smart Car Parking System Using Arduino UNO: Suvarna Nandyal Sabiya Sultana Sadaf AnjumDocument6 pagesSmart Car Parking System Using Arduino UNO: Suvarna Nandyal Sabiya Sultana Sadaf AnjumOluwaseun AlhassanNo ratings yet
- Automatic Smart Parking System Using Internet of Things (IOT)Document4 pagesAutomatic Smart Parking System Using Internet of Things (IOT)Praveen Mathias100% (1)
- Folder 3 - Publikasi - SAY - IMA1IFDocument5 pagesFolder 3 - Publikasi - SAY - IMA1IFrin taNo ratings yet
- Jurnal Sistem Parkir Dengan Arduino Uno Parkir - Sip - 3311811070 - 3311811017 - 3311811078Document7 pagesJurnal Sistem Parkir Dengan Arduino Uno Parkir - Sip - 3311811070 - 3311811017 - 3311811078rin taNo ratings yet
- Batch4 InternalDocument25 pagesBatch4 InternalEssu KandulaNo ratings yet
- Ijaerv14n2spl 04Document4 pagesIjaerv14n2spl 04srinivasNo ratings yet
- Density Based Traffic Light ControlDocument6 pagesDensity Based Traffic Light ControlVIVA-TECH IJRINo ratings yet
- Alacrity Control Using CateyeDocument5 pagesAlacrity Control Using CateyeRega RmsNo ratings yet
- Sensors 15 15443 v2Document25 pagesSensors 15 15443 v2José Manuel Ortiz RodriguezNo ratings yet
- Smart Parking System From DNR College of Engineering and TechnologyDocument43 pagesSmart Parking System From DNR College of Engineering and TechnologyR. L. Venkat RajuNo ratings yet
- LORAWAN MainDocument18 pagesLORAWAN MainganeshrpujarNo ratings yet
- A Smart Parking Management System Using Iot TechnologyDocument4 pagesA Smart Parking Management System Using Iot TechnologyHợpですNo ratings yet
- Rancang Bangun Prototype Sistem Smart Parking Berbasis Arduino Dan Pemantauan Melalui SmartphoneDocument8 pagesRancang Bangun Prototype Sistem Smart Parking Berbasis Arduino Dan Pemantauan Melalui SmartphoneMoko DwiNo ratings yet
- Capta SensorDocument10 pagesCapta SensorluisNo ratings yet
- Traffic Light Monitoring System Based On NodeMCU UDocument7 pagesTraffic Light Monitoring System Based On NodeMCU UtarnaNo ratings yet
- SmartcarparkingsystemDocument7 pagesSmartcarparkingsystem21E135 MAHIESHWAR.JNo ratings yet
- Cloud Based Smart Dustbin For Metro Stations: A Technical Seminar Report OnDocument17 pagesCloud Based Smart Dustbin For Metro Stations: A Technical Seminar Report OnAj NethaNo ratings yet
- Smart Fuel and Vehicle Theft Identification by Using IoTDocument4 pagesSmart Fuel and Vehicle Theft Identification by Using IoTInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Embedded System Based Secured Car Parking System: S. KaliappanDocument5 pagesEmbedded System Based Secured Car Parking System: S. KaliappanvineeshaNo ratings yet
- Downloads Papers N56e7c208d031bDocument7 pagesDownloads Papers N56e7c208d031bqueenie sabanalNo ratings yet
- Design of Traffic Flow Based Street Light Control System: Vipasha Preeti AbrolDocument6 pagesDesign of Traffic Flow Based Street Light Control System: Vipasha Preeti AbrolrewatiNo ratings yet
- Smart Parking SystemDocument7 pagesSmart Parking Systemsunil ahujaNo ratings yet
- Ijiset Ncisct 220505Document4 pagesIjiset Ncisct 220505R.BALA KRISHNANNo ratings yet
- Final Report Control SystemDocument13 pagesFinal Report Control SystemAkash SaraogiNo ratings yet
- Autonomous Vehicle With Machine Vision and Integrated Sensor Suite Based On Internet-of-Things TechnologiesDocument13 pagesAutonomous Vehicle With Machine Vision and Integrated Sensor Suite Based On Internet-of-Things TechnologiesIvan CheahNo ratings yet
- Smart Parking: Parking Occupancy Monitoring and Visualization System For Smart CitiesDocument5 pagesSmart Parking: Parking Occupancy Monitoring and Visualization System For Smart CitiesKarl SiaganNo ratings yet
- An Approach For Smart Parking System Based On Cloud Using IotDocument3 pagesAn Approach For Smart Parking System Based On Cloud Using Iotmayur gujarNo ratings yet
- Power Quality Improvement TechniquesDocument3 pagesPower Quality Improvement TechniquesJanardhan BandikariNo ratings yet
- A Literature Survey On "Density Based Traffic Signal System Using Loadcells and Ir Sensors"Document3 pagesA Literature Survey On "Density Based Traffic Signal System Using Loadcells and Ir Sensors"hiraNo ratings yet
- Design and Implementation of A Prototype Smart Parking (Spark) System Using Wireless Sensor NetworksDocument6 pagesDesign and Implementation of A Prototype Smart Parking (Spark) System Using Wireless Sensor NetworksDr-Surendra Kumar ShuklaNo ratings yet
- Smart Car Parking System Prototype Utilizing CCTVS: April 2015Document2 pagesSmart Car Parking System Prototype Utilizing CCTVS: April 2015Sandeep kumarNo ratings yet
- Automatic Smart Parking System Using Internet of Things (IOT)Document9 pagesAutomatic Smart Parking System Using Internet of Things (IOT)Rajeshwar PoteNo ratings yet
- Iot-Based Monitoring System: Car'S ParkingDocument11 pagesIot-Based Monitoring System: Car'S ParkingMarta Marizza DespotovicNo ratings yet
- EeeeDocument8 pagesEeeeyosefsnts7No ratings yet
- Generalized Parking Occupancy Analysis Based On DiDocument25 pagesGeneralized Parking Occupancy Analysis Based On DiMuchammad DaroWardyNo ratings yet
- Low Cost AvDocument5 pagesLow Cost AvrahulsundaresanNo ratings yet
- Smart Car Parking System: August 2016Document7 pagesSmart Car Parking System: August 2016Dhananjay JahagirdarNo ratings yet
- Design of Intelligent Braking System: February 2000Document7 pagesDesign of Intelligent Braking System: February 2000Nihal RajNo ratings yet
- BodyDocument12 pagesBodyRahul KumarNo ratings yet
- Rfid BunDocument7 pagesRfid BunSimona NicoletaNo ratings yet
- Paper 8923Document7 pagesPaper 8923IJARSCT JournalNo ratings yet
- Sensors: Smart Parking System With Dynamic Pricing, Edge-Cloud Computing and LoraDocument22 pagesSensors: Smart Parking System With Dynamic Pricing, Edge-Cloud Computing and LoraZahara175No ratings yet
- SmartParking A Secure and Intelligent Parking SystemDocument11 pagesSmartParking A Secure and Intelligent Parking SystemFabián CNo ratings yet
- 1st ReviewDocument14 pages1st ReviewSkive FabsysNo ratings yet
- 23621-Article Text-35768-1-10-20200613Document8 pages23621-Article Text-35768-1-10-20200613Samuel HamiltonNo ratings yet
- Building Wireless Sensor Networks: Application to Routing and Data DiffusionFrom EverandBuilding Wireless Sensor Networks: Application to Routing and Data DiffusionNo ratings yet
- Using Artificial Neural Networks for Analog Integrated Circuit Design AutomationFrom EverandUsing Artificial Neural Networks for Analog Integrated Circuit Design AutomationNo ratings yet
- Geometry Print VersionDocument32 pagesGeometry Print VersionLina ZapataNo ratings yet
- Ethernet IndustrialDocument30 pagesEthernet IndustrialLina ZapataNo ratings yet
- 1.1 The Vision of Multiagent SystemsDocument14 pages1.1 The Vision of Multiagent SystemsLina ZapataNo ratings yet
- JADE OntologiesDocument31 pagesJADE OntologiesLina ZapataNo ratings yet
- 3bus095400 L A en Symphony Plus S TurbineDocument16 pages3bus095400 L A en Symphony Plus S TurbinemiguelNo ratings yet
- PC - Control (04 - 2017)Document44 pagesPC - Control (04 - 2017)Jorge_Andril_5370No ratings yet
- NASA-TM-4628 - Recommended Techniques For Effective Maintainability - 1994Document120 pagesNASA-TM-4628 - Recommended Techniques For Effective Maintainability - 1994Jose GanozaNo ratings yet
- Sme Aerospace Sdn. BHDDocument1 pageSme Aerospace Sdn. BHDMat UsoppNo ratings yet
- Mil STD 781dDocument47 pagesMil STD 781drezaNo ratings yet
- Slab Culvert Estimation FinalDocument28 pagesSlab Culvert Estimation FinalBinod Raj GiriNo ratings yet
- Arbt5 Letter FinalDocument4 pagesArbt5 Letter FinalRick SarazaNo ratings yet
- Mechatronics A Multidisciplinary Approach Volume 10Document27 pagesMechatronics A Multidisciplinary Approach Volume 10Amit Kumar0% (1)
- SE Unit 1Document32 pagesSE Unit 1nmaheshkumar EEE-HICETNo ratings yet
- CE ReportDocument17 pagesCE ReportFritze Hansteen OngNo ratings yet
- Iit Delhi: General OutlineDocument16 pagesIit Delhi: General OutlineGARGI SHARMANo ratings yet
- Ms (Ee) SosfinalDocument96 pagesMs (Ee) SosfinalMuhammad QasimNo ratings yet
- 5 - Temporary Wiring - CableDocument2 pages5 - Temporary Wiring - CableRafee PieNo ratings yet
- Contract NoDocument7 pagesContract NoCalvinNo ratings yet
- Technologies Design and Technologies Curriculum Content F 6 v9Document25 pagesTechnologies Design and Technologies Curriculum Content F 6 v9Avneet KourNo ratings yet
- TNSLPDocument6 pagesTNSLPde_ep_anNo ratings yet
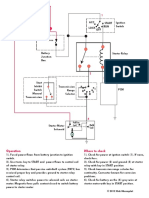
- Ford Starting SystemDocument1 pageFord Starting SystemRichard Andrianjaka LuckyNo ratings yet
- Potential Applications of Nanotechnology in Pavement EngineeringDocument9 pagesPotential Applications of Nanotechnology in Pavement EngineeringIvan WibowoNo ratings yet
- Sand Plant Project Schedule & Monthly Cash FlowsDocument1 pageSand Plant Project Schedule & Monthly Cash FlowsSyed Adnan AqibNo ratings yet
- Engineering Technologist GuidelinesDocument6 pagesEngineering Technologist Guidelinesasd dsaNo ratings yet
- ISTQB Question Paper14Document11 pagesISTQB Question Paper14KapildevNo ratings yet
- HFSS Datasheet WebDocument2 pagesHFSS Datasheet Webbecool_bcn75No ratings yet
- Ashrae Library 1 PDFDocument16 pagesAshrae Library 1 PDFosama alabsiNo ratings yet
- Arghya Mohanta - Continuous Assessment 3Document10 pagesArghya Mohanta - Continuous Assessment 3Arghya MohantaNo ratings yet
- AEM Rev.8 - T10112R8Document4 pagesAEM Rev.8 - T10112R8Elena NistoroiuNo ratings yet
- Comparison of The ASME, BS and CEN Fatigue Design Rules For Pressure Vessels (October 2003)Document2 pagesComparison of The ASME, BS and CEN Fatigue Design Rules For Pressure Vessels (October 2003)sagar1503No ratings yet
- OW Building SpecificationsDocument20 pagesOW Building SpecificationsVholts Villa Vitug0% (1)
- ANSI B16.9 Eccentric - Concentric ReducersDocument4 pagesANSI B16.9 Eccentric - Concentric Reducershendrihandyani6394No ratings yet
- Mechatronic Engineer Career OverviewDocument14 pagesMechatronic Engineer Career OverviewSathiasilan SundaramNo ratings yet
- BS 1521 - 1972 - Waterproof Building Papers PDFDocument11 pagesBS 1521 - 1972 - Waterproof Building Papers PDFtheinNo ratings yet