You might also like
- Verified Interfacing ProgramDocument16 pagesVerified Interfacing ProgramVishwanath B RajashekarNo ratings yet
- Verilog HDL: ModuleDocument9 pagesVerilog HDL: ModuleM Usman RiazNo ratings yet
- Verilog HDL: ModuleDocument9 pagesVerilog HDL: ModuleAvinash ReddyNo ratings yet
- Cycle 3 Part BDocument10 pagesCycle 3 Part BNithyashree MNo ratings yet
- Evl 104 Vlsi Design Lab-I: Ex - No:1 Modeling of Sequential Digital Systems Using VHDLDocument34 pagesEvl 104 Vlsi Design Lab-I: Ex - No:1 Modeling of Sequential Digital Systems Using VHDLvijithacvijayanNo ratings yet
- 21BCT0226 VL2022230104560 Ast04Document22 pages21BCT0226 VL2022230104560 Ast04Mohammed MohsinNo ratings yet
- Verilog Modules For Common Digital FunctionsDocument30 pagesVerilog Modules For Common Digital Functionssudarshan poojaryNo ratings yet
- Verilog Modules For Common Digital FunctionsDocument30 pagesVerilog Modules For Common Digital Functionselle868No ratings yet
- Pico VHDLDocument6 pagesPico VHDLapi-584316598No ratings yet
- Verilog Coding For Digital SystemDocument12 pagesVerilog Coding For Digital SystemBalajeNo ratings yet
- Ee 241 Digital Circuits Final Exam Solution ManualDocument10 pagesEe 241 Digital Circuits Final Exam Solution ManualkdrdNo ratings yet
- Clock System: Appendix DDocument21 pagesClock System: Appendix Dmostafa HusseinNo ratings yet
- Module MainDocument11 pagesModule MainRr RongNo ratings yet
- Nhom CT3 1 TuanNamHieuDuyDocument15 pagesNhom CT3 1 TuanNamHieuDuyPhan Duy LuanNo ratings yet
- EDEPOTENCIADocument6 pagesEDEPOTENCIAJhoel René Mamani HuancaNo ratings yet
- Lab 6 DSDDocument12 pagesLab 6 DSDRohaidNo ratings yet
- Lab 4Document17 pagesLab 4Prithvi RastogiNo ratings yet
- Verilog ProgramDocument24 pagesVerilog ProgramRahul BhatiaNo ratings yet
- Digital Design and Synthesis: Fall 09Document35 pagesDigital Design and Synthesis: Fall 09Lua Dinh ThiNo ratings yet
- Omair Akhtar 120526 Bemts (6A) Assignment 5Document6 pagesOmair Akhtar 120526 Bemts (6A) Assignment 5HammadMehmoodNo ratings yet
- Lab 4Document23 pagesLab 4Suyash MishraNo ratings yet
- 21BCT0093 VL2022230504083 Ast08Document15 pages21BCT0093 VL2022230504083 Ast08Srinivasan UmaNo ratings yet
- 4bit Binary (Up) Counter Using Synchronous Reset: Code:: Assignment Shift Registers and CountersDocument11 pages4bit Binary (Up) Counter Using Synchronous Reset: Code:: Assignment Shift Registers and CountersNarendra gunnamNo ratings yet
- Verilog CodesDocument26 pagesVerilog Codesnvrkrishna456No ratings yet
- Shri Ramdeobaba College of Engineering andDocument18 pagesShri Ramdeobaba College of Engineering andAditya BelekarNo ratings yet
- Digital VlsiDocument18 pagesDigital Vlsiwww.chandangowda1128No ratings yet
- Vlsi Lab ProgramsDocument14 pagesVlsi Lab ProgramsThirumalai TrendchaserNo ratings yet
- Verilog and Test Bench Code For FlipflopsDocument11 pagesVerilog and Test Bench Code For FlipflopsKeith Fernandes67% (3)
- Abu Minhaj Farooqi 37560 Fpga Final ExamDocument20 pagesAbu Minhaj Farooqi 37560 Fpga Final ExamMinhaj FarooqiNo ratings yet
- Shift RegisterDocument9 pagesShift Registersilent nameNo ratings yet
- Vlsi - Digital - Lab ManualDocument23 pagesVlsi - Digital - Lab ManualVamsi KrishnanNo ratings yet
- fft256 Verilog CodeDocument3 pagesfft256 Verilog CodeAdithyan JNo ratings yet
- LCD DSDDocument4 pagesLCD DSDAwais ShamsNo ratings yet
- PID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderDocument13 pagesPID Control MAX6675 Thermocouple Arduino Schematic With Rotary EncoderStewin Perez100% (1)
- Verilog Lab SolutionsDocument15 pagesVerilog Lab Solutionsraja_ramalingam07No ratings yet
- Lab 13Document11 pagesLab 13ubaidNo ratings yet
- Correction TPDocument4 pagesCorrection TPHichem GuedriNo ratings yet
- Assignment3 2021HT80531Document14 pagesAssignment3 2021HT80531crypto.investnmentNo ratings yet
- Digital Partb ProgramsDocument9 pagesDigital Partb ProgramsRohit Vinayak HegdeNo ratings yet
- 06 Verilog SynthDocument41 pages06 Verilog SynthAlexandru OleinicNo ratings yet
- VERILOG Code For Up and Down Counter of Varying FrequencyDocument11 pagesVERILOG Code For Up and Down Counter of Varying FrequencyKartik VermaNo ratings yet
- Verilog FaqDocument101 pagesVerilog Faqbalashyamu100% (1)
- Fall Semester 2022-2023 MVLD503P - Digital Design With FPGA Lab M. Tech VLSI Design School of Electronics Engineering Vellore Institute of TechnologyDocument5 pagesFall Semester 2022-2023 MVLD503P - Digital Design With FPGA Lab M. Tech VLSI Design School of Electronics Engineering Vellore Institute of TechnologyShrishty RawatNo ratings yet
- Fpga Lab Reports 1-8 2Document17 pagesFpga Lab Reports 1-8 2Sohail AfridiNo ratings yet
- Verilog Sequential Circuits CodeDocument14 pagesVerilog Sequential Circuits CodePVPPPNo ratings yet
- Booth Multiplier VHDL CodeDocument1 pageBooth Multiplier VHDL CodeSameera Somisetty50% (4)
- Lampiran 1 Koding AlatDocument34 pagesLampiran 1 Koding AlatMuhammad RoziNo ratings yet
- VHDL CodesDocument9 pagesVHDL CodesSaneesh KarayilNo ratings yet
- LockDocument17 pagesLockRajNo ratings yet
- LCDDocument4 pagesLCDPragathi P PaiNo ratings yet
- Non-Block and Block in VerilogDocument7 pagesNon-Block and Block in VerilogRohan sharmaNo ratings yet
- CALCULADORADocument4 pagesCALCULADORAJesús guzmánNo ratings yet
- Dcs-Ii Lab File: - Anupam Sobti 17/EC/09Document19 pagesDcs-Ii Lab File: - Anupam Sobti 17/EC/09Ankit GoelNo ratings yet
- Program To Make A Code Lock With User Defined PasswordDocument19 pagesProgram To Make A Code Lock With User Defined PasswordSrinivasMunubarthiNo ratings yet
- DSD PPT Usr and CN and Odd DividerDocument22 pagesDSD PPT Usr and CN and Odd Dividerece19637ec003No ratings yet
- #Define #Define #Define #Define #Define #Define #Define #DefineDocument6 pages#Define #Define #Define #Define #Define #Define #Define #Defineอํานาจ จันทรNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Overall ProgramsDocument5 pagesOverall ProgramsLavanyaNo ratings yet
- Obligations Digests For Civil Law ReviewDocument121 pagesObligations Digests For Civil Law ReviewMacel Ylagan Dacanay100% (2)
- Syllabus of Property LawDocument4 pagesSyllabus of Property LawpiyushNo ratings yet
- How To Start Modding Dungeons of DredmorDocument2 pagesHow To Start Modding Dungeons of DredmorChance BNo ratings yet
- Set+1 Descriptive+statistics+Probability+Document4 pagesSet+1 Descriptive+statistics+Probability+Anusha MeesalaNo ratings yet
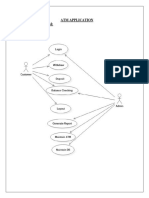
- Atm Application Use Case DiagramDocument58 pagesAtm Application Use Case DiagramS. Mohd TharikNo ratings yet
- Contactor - Wikipedia, The Free EncyclopediaDocument6 pagesContactor - Wikipedia, The Free EncyclopediaAbhishek RoyNo ratings yet
- GR 169889 Sps Yap & Guevarra V First E-Bank CorporationDocument7 pagesGR 169889 Sps Yap & Guevarra V First E-Bank CorporationXyriel RaeNo ratings yet
- Fisa Tehnica Contact Magnetic SM35Document2 pagesFisa Tehnica Contact Magnetic SM35Alin ChiperNo ratings yet
- Codigos TV SMK SAM UniversalDocument16 pagesCodigos TV SMK SAM UniversalJeff KbreraNo ratings yet
- GP Systems Interface Requirements v1 - Draft11Document22 pagesGP Systems Interface Requirements v1 - Draft11EwanDavisNo ratings yet
- 2550m FormDocument1 page2550m FormAileen Jarabe80% (5)
- US Certified Management Accountant (CMA)Document8 pagesUS Certified Management Accountant (CMA)HussainNo ratings yet
- Reyes Vs HRET GR 221103Document20 pagesReyes Vs HRET GR 221103Di JoyaNo ratings yet
- The Twigan Cultural Centre Dispute: T I L M C C 2017Document59 pagesThe Twigan Cultural Centre Dispute: T I L M C C 2017Adimarta TeguhNo ratings yet
- BE YLAA Spec Engineering Guide B50HzDocument54 pagesBE YLAA Spec Engineering Guide B50HzPrestoneKNo ratings yet
- HP Board of School Education Dharamshala Syllabus: Subject: Computer Science Class: 9Document4 pagesHP Board of School Education Dharamshala Syllabus: Subject: Computer Science Class: 9Principal AveriNo ratings yet
- Necuron 1007 DBDocument2 pagesNecuron 1007 DBlomas34No ratings yet
- Norwegian School of EconomicsDocument2 pagesNorwegian School of EconomicsVimal AnbalaganNo ratings yet
- Project Cost Management With 5D Bim: SciencedirectDocument8 pagesProject Cost Management With 5D Bim: Sciencedirectcrises7No ratings yet
- 16.order ListsDocument4 pages16.order ListsHashiim TahirNo ratings yet
- Nuclie PDFDocument34 pagesNuclie PDFlvnarsingaraoNo ratings yet
- Report On Organizational Behavior of NIB BankDocument21 pagesReport On Organizational Behavior of NIB BankMuhammad IrfanNo ratings yet
- Doc13 PDFDocument6 pagesDoc13 PDFBladeNo ratings yet
- Macrocytosis - What Causes It - Mayo ClinicDocument3 pagesMacrocytosis - What Causes It - Mayo ClinicvmarinelliNo ratings yet
- Important Case Law & Legal GK 2020Document25 pagesImportant Case Law & Legal GK 2020kusu100% (1)
- Dhruv Kumar (10je0957) - B.tech (Petroleum Engineering)Document3 pagesDhruv Kumar (10je0957) - B.tech (Petroleum Engineering)Priyanka PanigrahiNo ratings yet
- FRCSOrthExam Education Viva Topics1Document20 pagesFRCSOrthExam Education Viva Topics1ts8166100% (1)
- Request Form For Postponement of Return DateDocument4 pagesRequest Form For Postponement of Return DateAzimah MustafaNo ratings yet
- Outpatient Appointment Systems in Healthcare - A Review of Optimization StudiesDocument32 pagesOutpatient Appointment Systems in Healthcare - A Review of Optimization Studiesgabrieelcrazy100% (1)