You might also like
- 2.operating System 2.introduction To LinuxDocument23 pages2.operating System 2.introduction To LinuxSri VardhanNo ratings yet
- Saudi Aramco q2 2021 Interim Report EnglishDocument37 pagesSaudi Aramco q2 2021 Interim Report English既夹No ratings yet
- Course - DBMS: Course Instructor Dr.K. Subrahmanyam Department of CSE, KLEFDocument99 pagesCourse - DBMS: Course Instructor Dr.K. Subrahmanyam Department of CSE, KLEFKadarla BharathNo ratings yet
- Computer Graphics Viva LabDocument4 pagesComputer Graphics Viva LabajmalNo ratings yet
- Speed Control OF WIND TURBINEDocument4 pagesSpeed Control OF WIND TURBINESHADDOWWNo ratings yet
- LinkedIn StrategyDocument22 pagesLinkedIn StrategyAnonymous mzuRnewGNo ratings yet
- 5 Basic Operations Performed by Computer SystemDocument5 pages5 Basic Operations Performed by Computer SystemNuj Wehtam Inairam100% (7)
- Ch. 2 - Programming Projects (Solutions) - 2Document3 pagesCh. 2 - Programming Projects (Solutions) - 2antonio chedid0% (1)
- Secondary Memory MCQDocument14 pagesSecondary Memory MCQSwatilagna sahuNo ratings yet
- Operating System Lab - ManualDocument70 pagesOperating System Lab - ManualKumar ArikrishnanNo ratings yet
- SE351-Software Construction and Development: Semester 5Document21 pagesSE351-Software Construction and Development: Semester 5Ali RAZA100% (1)
- Hospital Case StudyDocument12 pagesHospital Case StudyDhirendra Raj100% (1)
- DILG - Guide To Ecological ProfilingDocument124 pagesDILG - Guide To Ecological ProfilingJane HomenaNo ratings yet
- Bca-Vi Sem-Pc HW and Network-SylDocument6 pagesBca-Vi Sem-Pc HW and Network-Syllo leeeNo ratings yet
- 18CS42 Model Question Paper - 1 With Effect From 2019-20 (CBCS Scheme)Document3 pages18CS42 Model Question Paper - 1 With Effect From 2019-20 (CBCS Scheme)M.A rajaNo ratings yet
- OSS 2marks With AnswerDocument39 pagesOSS 2marks With AnswerSiva Balan100% (3)
- Prison Management System SrsDocument19 pagesPrison Management System SrsTamoghna MajumdarNo ratings yet
- Assembler DirectivesDocument34 pagesAssembler DirectivesJobin SebastianNo ratings yet
- Minor Project Report Format May 2011Document51 pagesMinor Project Report Format May 2011Anadi Sharma0% (1)
- Q. 28 Explain Asynchronous Data Transfer Using Timing Diagrams. AnsDocument14 pagesQ. 28 Explain Asynchronous Data Transfer Using Timing Diagrams. AnssodutuNo ratings yet
- Software Requirements Specification: COMSATS University Islamabad, COMSATS Road, Off GT Road, Sahiwal, PakistanDocument13 pagesSoftware Requirements Specification: COMSATS University Islamabad, COMSATS Road, Off GT Road, Sahiwal, PakistanFarah QandeelNo ratings yet
- Cs2253 - Computer Architecture 16 Marks Question Bank With Hints Unit - I 1. Explain Basic Functional Units of Computer. Input UnitDocument18 pagesCs2253 - Computer Architecture 16 Marks Question Bank With Hints Unit - I 1. Explain Basic Functional Units of Computer. Input UnitArun VijayNo ratings yet
- III Sem (CA) RDBMS Lab Qoestion Bank 2019-20Document5 pagesIII Sem (CA) RDBMS Lab Qoestion Bank 2019-20MAJA YAHI HAINo ratings yet
- Chap 4Lesson05Device DriverDocument14 pagesChap 4Lesson05Device DriverreneeshczNo ratings yet
- Question PaperDocument8 pagesQuestion PaperGopi PNo ratings yet
- Input Output in Assembly LanguageDocument23 pagesInput Output in Assembly LanguageThegomez72100% (1)
- Processor and Memory OrganizationDocument17 pagesProcessor and Memory OrganizationVenkatavijay YarlagaddaNo ratings yet
- Snake Game DocumentationDocument13 pagesSnake Game DocumentationBhavya Pratap singh 076No ratings yet
- Cs6413-Os Lab Manual-Backup 2 NewDocument113 pagesCs6413-Os Lab Manual-Backup 2 NewjegadeepaNo ratings yet
- AL3452 Operating Systems Lecture Notes 1Document278 pagesAL3452 Operating Systems Lecture Notes 1rishashri004No ratings yet
- CoE415R Lab ManualDocument5 pagesCoE415R Lab Manualnak6257No ratings yet
- Ec8691 - Microprocessors and Microcontrollers: Question BankDocument5 pagesEc8691 - Microprocessors and Microcontrollers: Question Bankrkkumar07No ratings yet
- Network Programming ImpDocument5 pagesNetwork Programming Impsharath_rakkiNo ratings yet
- Assignment 3 11-5-23Document3 pagesAssignment 3 11-5-23Haider khan100% (2)
- MIC Solved Questions BankDocument14 pagesMIC Solved Questions BankAdvait kamthekarNo ratings yet
- Ai Important Questions For Semester ExamsDocument197 pagesAi Important Questions For Semester ExamsDeepak YaduvanshiNo ratings yet
- LabVIEW PPT PresentationDocument27 pagesLabVIEW PPT PresentationRanadeep DeyNo ratings yet
- A) Representation of NULL PointerDocument8 pagesA) Representation of NULL PointerMESHAKNo ratings yet
- Koradi Thermal Power Station (KTPS) IsDocument17 pagesKoradi Thermal Power Station (KTPS) IsBappa ChaclickNo ratings yet
- Practical List (AI)Document2 pagesPractical List (AI)Margil ShahNo ratings yet
- CS17303 Computer Architecture Notes On Lesson Unit IV - SumathiDocument24 pagesCS17303 Computer Architecture Notes On Lesson Unit IV - SumathiPraki SachuNo ratings yet
- Os Process SchedulingDocument4 pagesOs Process SchedulingkiranmaiNo ratings yet
- Computer Organization - Lab Viva QuestionsDocument3 pagesComputer Organization - Lab Viva QuestionsSirisha VamsiNo ratings yet
- Embedded System Assignment 1Document1 pageEmbedded System Assignment 1Vijayaraghavan AravamuthanNo ratings yet
- UNIT I Embedded SystemsDocument60 pagesUNIT I Embedded SystemspremsonyNo ratings yet
- 4363741911Document26 pages4363741911Arnav Singh100% (1)
- 2 Marks With AnswersDocument14 pages2 Marks With Answersprisci_durai83% (6)
- What Is An Applet SkeletonDocument2 pagesWhat Is An Applet SkeletontanviNo ratings yet
- Unix File Attributes AND PermissionDocument13 pagesUnix File Attributes AND PermissionYashavanth TrNo ratings yet
- MTQP04 Computer ScienceDocument3 pagesMTQP04 Computer ScienceDilip KumarNo ratings yet
- Cs6511 Case Tools Lab Record-1Document150 pagesCs6511 Case Tools Lab Record-1Gokul RajNo ratings yet
- Micro-Project: Title: Sort The Array in Descending Order DescriptionDocument7 pagesMicro-Project: Title: Sort The Array in Descending Order DescriptionSAMMED PATILNo ratings yet
- Assignment 1 CompDocument5 pagesAssignment 1 CompJohaness Ronaldo Jr.No ratings yet
- Charusat Android Practical List.Document95 pagesCharusat Android Practical List.programmerNo ratings yet
- 5CS4-03 - Operating System - Kajal MathurDocument157 pages5CS4-03 - Operating System - Kajal MathurIshaan KhandelwalNo ratings yet
- Notes On Operating System2013 FormattedDocument212 pagesNotes On Operating System2013 FormattedLaxmiPantNo ratings yet
- Cse III Computer Organization (15cs34) Question PaperDocument4 pagesCse III Computer Organization (15cs34) Question Paperusha kattiNo ratings yet
- Srs On Railway ReservationDocument21 pagesSrs On Railway Reservationgauravmaurya14363% (8)
- William Stallings Computer Organization and Architecture 9 EditionDocument40 pagesWilliam Stallings Computer Organization and Architecture 9 EditionAdnan Aslam MerchantNo ratings yet
- Operating Systems-1Document24 pagesOperating Systems-1M Jameel MydeenNo ratings yet
- 8086 Memory SegmentationDocument11 pages8086 Memory SegmentationMAHALAKSHMI MALININo ratings yet
- DBMS Case Studies CSE IVSemDocument16 pagesDBMS Case Studies CSE IVSemHarshad KulsangeNo ratings yet
- Basic Components of Computer SystemDocument4 pagesBasic Components of Computer SystemAnonymous u64nn35tHCNo ratings yet
- Computer Organization & Architecture: Input UnitDocument3 pagesComputer Organization & Architecture: Input UnitTilak JethwaNo ratings yet
- 3 Moment Theorem 1 Practical Material FFFDocument72 pages3 Moment Theorem 1 Practical Material FFFPronay DhakNo ratings yet
- Vsphere Storage Appliance 10 Install ConfigDocument50 pagesVsphere Storage Appliance 10 Install Configstefmont2004No ratings yet
- Europe Vol4 PDFDocument36 pagesEurope Vol4 PDFJosé Antonio CabezaNo ratings yet
- Investigating The Link Between Motivation Work STR PDFDocument22 pagesInvestigating The Link Between Motivation Work STR PDFTim HuntNo ratings yet
- GigaDevice Semicon Beijing GD32F205RGT6 - C2688739Document58 pagesGigaDevice Semicon Beijing GD32F205RGT6 - C2688739Yannik LoroeschNo ratings yet
- Leadership ExamDocument3 pagesLeadership ExamELIE EL ZOUKINo ratings yet
- CMHC Annual Report 2022 enDocument177 pagesCMHC Annual Report 2022 enHelena MarlynNo ratings yet
- Preliminary Footing Design Template: Jsdesign EngineeringDocument2 pagesPreliminary Footing Design Template: Jsdesign EngineeringJohnnyNo ratings yet
- Advance MacHinery Exchange, Inc. v. Commissioner of Internal Revenue, 196 F.2d 1006, 2d Cir. (1952)Document5 pagesAdvance MacHinery Exchange, Inc. v. Commissioner of Internal Revenue, 196 F.2d 1006, 2d Cir. (1952)Scribd Government DocsNo ratings yet
- NJCAA Eligibility Affidavit: Personal InformationDocument2 pagesNJCAA Eligibility Affidavit: Personal InformationerronNo ratings yet
- Hex7 BSM580-600M10-72HNH Bifacial V2311Document2 pagesHex7 BSM580-600M10-72HNH Bifacial V2311Sergio GuerraNo ratings yet
- Iso 105.a03.1993Document10 pagesIso 105.a03.1993Muthukumaar GanapathisamyNo ratings yet
- A Polypropylene Film With Excellent Clarity Combined With Avery Dennison Clearcut™ Adhesive Technology and With A Glassine LinerDocument4 pagesA Polypropylene Film With Excellent Clarity Combined With Avery Dennison Clearcut™ Adhesive Technology and With A Glassine LinerAhmad HaririNo ratings yet
- Document (1) 1Document1 pageDocument (1) 1abdularejNo ratings yet
- Generation Z: Forbes MagazineDocument2 pagesGeneration Z: Forbes MagazineVladut Irina-elenaNo ratings yet
- Python 3 Application ProgrammingDocument12 pagesPython 3 Application ProgrammingTECHer YTNo ratings yet
- Workshop Brochure 2 Oct 2021Document6 pagesWorkshop Brochure 2 Oct 2021s_samitNo ratings yet
- Current Sensing Power MOSFET MOTOROLA PDFDocument6 pagesCurrent Sensing Power MOSFET MOTOROLA PDFRecep IvedikNo ratings yet
- D 1.3 CTower-DS-C-C Tce HZL BhelDocument1 pageD 1.3 CTower-DS-C-C Tce HZL BhelShameer MajeedNo ratings yet
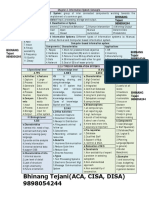
- Isca Chap 2 Revision ChartDocument2 pagesIsca Chap 2 Revision ChartKumar SwamyNo ratings yet
- Fa18-Eee-046, Machine Lab Report 5Document4 pagesFa18-Eee-046, Machine Lab Report 5Huzaifa ZamanNo ratings yet
- Kepimpinan Strategik Dan Hubungannya Dengan Kualiti Pengajaran GuruDocument13 pagesKepimpinan Strategik Dan Hubungannya Dengan Kualiti Pengajaran GuruGunalatcumy KarunanitheNo ratings yet
- Latter v. Braddell 1881 EnglandDocument7 pagesLatter v. Braddell 1881 EnglandJulieNo ratings yet
- 66 - 15575 - EC 732 - 2014 - 1 - 1 - 2 - Chapter 2 - ADocument30 pages66 - 15575 - EC 732 - 2014 - 1 - 1 - 2 - Chapter 2 - AMourougapragash Subramanian50% (2)
- Carlos Rodríguez: Supply Chain ManagerDocument3 pagesCarlos Rodríguez: Supply Chain ManagerGIANNINo ratings yet