You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Western Music Theory 101Document11 pagesWestern Music Theory 101Dan The-Bhakti ManNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Practical Feedback Loop Design Considerations For Switched Mode Power SuppliesDocument14 pagesPractical Feedback Loop Design Considerations For Switched Mode Power SuppliesDiego PhillipeNo ratings yet
- Carnatic Music of South IndiaDocument14 pagesCarnatic Music of South IndiaMiriana FaietaNo ratings yet
- Basic Statistical Tools in Research and Data AnalysisDocument5 pagesBasic Statistical Tools in Research and Data AnalysisAira VillarinNo ratings yet
- Transformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryDocument4 pagesTransformer-Coupled Front-End For Wideband A/D Converters: Primary SecondaryAvinash SharmaNo ratings yet
- Deglobalization of GlobalizationDocument20 pagesDeglobalization of GlobalizationAbdullah FarhadNo ratings yet
- Diogenes The Cynic and Shakespeare's Bitter FoolDocument31 pagesDiogenes The Cynic and Shakespeare's Bitter FoolGEORGE FELIPE BERNARDES BARBOSA BORGESNo ratings yet
- Talent Is Overrated-Summary PDFDocument9 pagesTalent Is Overrated-Summary PDFCarlos Washington Mercado100% (1)
- Memorial On Behalf of The Respondent: Participant Code-C-86Document18 pagesMemorial On Behalf of The Respondent: Participant Code-C-86Aishna SinghNo ratings yet
- Montessori Practical Life ExercisesDocument3 pagesMontessori Practical Life ExercisesSiti ShalihaNo ratings yet
- Automatic Control Systems: Transfer FunctionsDocument23 pagesAutomatic Control Systems: Transfer FunctionsMU Len GANo ratings yet
- Semiconductor Application Note: Prepared By: Garth Nash Applications EngineeringDocument12 pagesSemiconductor Application Note: Prepared By: Garth Nash Applications EngineeringefddfdsdsaNo ratings yet
- RLC Transfer Function AnalysisDocument38 pagesRLC Transfer Function AnalysisMarasigan Ryan50% (2)
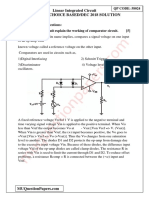
- Lic Dec 2018 Ans PDFDocument24 pagesLic Dec 2018 Ans PDFVaibhavNo ratings yet
- Experiment No 2Document10 pagesExperiment No 2Sakshi GargNo ratings yet
- Understanding Attenuators and Compensation: R R V R V R R R V VDocument7 pagesUnderstanding Attenuators and Compensation: R R V R V R R R V Vnithinjose4uNo ratings yet
- Introduction To Modern Network TheoryDocument8 pagesIntroduction To Modern Network TheoryS3ppukuNo ratings yet
- App 4 LaplaceDocument6 pagesApp 4 LaplaceRycille AlayanNo ratings yet
- Experiment No 2Document9 pagesExperiment No 2Sakshi GargNo ratings yet
- Settling Time of OpampDocument7 pagesSettling Time of OpampTumay KanarNo ratings yet
- An 1162Document36 pagesAn 1162naniknanikNo ratings yet
- Control Electrical System Transient EffectsDocument11 pagesControl Electrical System Transient EffectsJoseph NguyenNo ratings yet
- EE215 Lab 4Document6 pagesEE215 Lab 4vhiep195No ratings yet
- EE215: Fundamentals of Electrical Engineering Lab 4 Time Delay CircuitsDocument6 pagesEE215: Fundamentals of Electrical Engineering Lab 4 Time Delay CircuitsÁo ĐenNo ratings yet
- LTspice - Worst-Case Circuit AnalysisDocument7 pagesLTspice - Worst-Case Circuit Analysiscastor2010No ratings yet
- RLC Circuit Simulation Using PSpiceDocument8 pagesRLC Circuit Simulation Using PSpiceRudra MishraNo ratings yet
- Cadence - Virtuoso: Amity UniversityDocument27 pagesCadence - Virtuoso: Amity UniversityAkhil Aggarwal100% (1)
- Impedance Matching L-Networks at RFDocument9 pagesImpedance Matching L-Networks at RFadauNo ratings yet
- Lab 09 DacDocument8 pagesLab 09 DacSenthil KumarNo ratings yet
- Switch CapacitorDocument90 pagesSwitch CapacitorVaibhav Khurana100% (1)
- PPTPRITYDocument27 pagesPPTPRITYPrity kumariNo ratings yet
- Ece 3084 Su 14 HW 7Document6 pagesEce 3084 Su 14 HW 7Jay MehtaNo ratings yet
- AC Chopper-Auto Trans PDFDocument6 pagesAC Chopper-Auto Trans PDFBui DaiNo ratings yet
- Design of First and Second Order Circuits in Time and Frequency DomainDocument40 pagesDesign of First and Second Order Circuits in Time and Frequency DomainsravanNo ratings yet
- EEE 4308L Electronics I Laboratory Laboratory #1 Operational Amplifier-Based IntegratorsDocument19 pagesEEE 4308L Electronics I Laboratory Laboratory #1 Operational Amplifier-Based IntegratorsnoneNo ratings yet
- Three Phase PWM RectDocument13 pagesThree Phase PWM RectMridul MishraNo ratings yet
- Chapter 15 Circuit Analysis in The S-Domaun-1Document36 pagesChapter 15 Circuit Analysis in The S-Domaun-1umerNo ratings yet
- A Novel Space-Vector PWM Computations For A Dual Three-Level T-Type Converter Applied To An Open End-Winding Induction MachineDocument6 pagesA Novel Space-Vector PWM Computations For A Dual Three-Level T-Type Converter Applied To An Open End-Winding Induction MachineHieu VuNo ratings yet
- ps5 Thermal GuideDocument6 pagesps5 Thermal GuideSundaramNo ratings yet
- Automatic Generation ControlDocument12 pagesAutomatic Generation Controlrois tazNo ratings yet
- Control Systems NotesDocument18 pagesControl Systems NotesBoyang QinNo ratings yet
- Art3 - (S1), Florian Ion, 17-22Document6 pagesArt3 - (S1), Florian Ion, 17-22camiloNo ratings yet
- Laboratory Manual Course Code:Ece 201Document41 pagesLaboratory Manual Course Code:Ece 201Er Sacchu SrivastavaNo ratings yet
- Cmos Comparator: Term Paper Eem-511: Analog Electronics DesignDocument11 pagesCmos Comparator: Term Paper Eem-511: Analog Electronics Designvipul4792No ratings yet
- Activity 1 Part (A) : Time-Response Identification of A Resistor-Capacitor (RC) CircuitDocument18 pagesActivity 1 Part (A) : Time-Response Identification of A Resistor-Capacitor (RC) CircuitJose Juan Diaz LopezNo ratings yet
- RLC and Bandpass circuitsDocument4 pagesRLC and Bandpass circuitscuamiNo ratings yet
- Cuk Control PDFDocument57 pagesCuk Control PDFPraveen PJNo ratings yet
- Function Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorDocument7 pagesFunction Generator Op-Amp Summing Circuits Pulse Width Modulation LM311 ComparatorMuhammad JunaidNo ratings yet
- Link Between Phase Margin and Converter Transient ResponseDocument7 pagesLink Between Phase Margin and Converter Transient ResponseVIJAYPUTRANo ratings yet
- Digital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediaDocument7 pagesDigital Control Algorithm For Two-Stage DC-DC Converters: Energy ProcediamuthukumartharaniNo ratings yet
- Systems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversDocument6 pagesSystems Control Laboratory: ECE557F LAB2: Controller Design Using Pole Placement and Full Order ObserversColinSimNo ratings yet
- 1016 Hanshaw Road Ithaca, Ny 14850 Aug. 1, 2016Document10 pages1016 Hanshaw Road Ithaca, Ny 14850 Aug. 1, 2016David MartinsNo ratings yet
- DC-DC Converters Via Matlab/SimulinkDocument8 pagesDC-DC Converters Via Matlab/SimulinkAnonymous XXqrTWWNo ratings yet
- Objective: Design A Practical Integrator Circuit Using Common OP AMP Circuits. TestDocument10 pagesObjective: Design A Practical Integrator Circuit Using Common OP AMP Circuits. TestVinoth KumarNo ratings yet
- 808PET22 Eliminate Crossover Frequency Guesswork PDFDocument6 pages808PET22 Eliminate Crossover Frequency Guesswork PDFRamin DavoodiNo ratings yet
- Control Systems Group Project 2Document3 pagesControl Systems Group Project 2Yu-Yun ChangNo ratings yet
- Application of Z-Source Converter in Photovoltaic Grid-Connected Transformer-Less InverterDocument5 pagesApplication of Z-Source Converter in Photovoltaic Grid-Connected Transformer-Less InverterPaolo ProspNo ratings yet
- Practical No6Document5 pagesPractical No6NidhiNo ratings yet
- Lecture4-Modeling of Electrical SystemsDocument30 pagesLecture4-Modeling of Electrical Systemsahmad100% (1)
- Automatic Control (Part 2) : Frequency Domain AnalysisDocument4 pagesAutomatic Control (Part 2) : Frequency Domain AnalysisjachalfonsiniNo ratings yet
- Biomedical Control Systems (BCS) : Module Leader: DR Muhammad ArifDocument30 pagesBiomedical Control Systems (BCS) : Module Leader: DR Muhammad ArifPandu WiranataNo ratings yet
- Optimizing The Design of A Switched-Capacitor Dynamic-Element-Matching AmplifierDocument6 pagesOptimizing The Design of A Switched-Capacitor Dynamic-Element-Matching Amplifierreza12368No ratings yet
- A Comparative Study of Several Control Techniques Applied To A Boost ConverterDocument8 pagesA Comparative Study of Several Control Techniques Applied To A Boost ConverterSerhat GümüşNo ratings yet
- Class e InverterDocument7 pagesClass e InverterskLam321No ratings yet
- GSDocument26 pagesGSkarinadegomaNo ratings yet
- Reflective EssayDocument2 pagesReflective EssayMelissa SenNo ratings yet
- Fine Art Estate - 2017 CatalogDocument386 pagesFine Art Estate - 2017 CatalogWeygers FoundationNo ratings yet
- E-Commerce and Enterprise SystemsDocument19 pagesE-Commerce and Enterprise SystemsMaria Angela B. GalvezNo ratings yet
- Demerit System PointsDocument87 pagesDemerit System PointsBusinessTech25% (4)
- Philippines Supreme Court rules on robbery and double homicide caseDocument13 pagesPhilippines Supreme Court rules on robbery and double homicide caseNadzlah BandilaNo ratings yet
- Organization Theory and Design Canadian 2Nd Edition Daft Solutions Manual Full Chapter PDFDocument35 pagesOrganization Theory and Design Canadian 2Nd Edition Daft Solutions Manual Full Chapter PDFadeliahuy9m5u97100% (7)
- Right Triangle Activity For Quiz #2 - RetakeDocument4 pagesRight Triangle Activity For Quiz #2 - Retakeapi-16147700No ratings yet
- Swami Vivekananda's 1893 Chicago Speech on Religious UnityDocument2 pagesSwami Vivekananda's 1893 Chicago Speech on Religious UnityBiplab MahantiNo ratings yet
- Don Honorio Ventura State UniversityDocument3 pagesDon Honorio Ventura State UniversityLandayan Princess EuniceNo ratings yet
- Xploring FLN: Resource Pack On Foundational Literacy and Numeracy (FLN)Document119 pagesXploring FLN: Resource Pack On Foundational Literacy and Numeracy (FLN)rakeshahlNo ratings yet
- Milk Borne Disease 2 (Eng) - 2012Document46 pagesMilk Borne Disease 2 (Eng) - 2012seviandha100% (1)
- Curriculum Vitae: About MyselfDocument5 pagesCurriculum Vitae: About MyselfRahat Singh KachhwahaNo ratings yet
- Capital Budegting 1 PDFDocument16 pagesCapital Budegting 1 PDFSyed AhmadNo ratings yet
- UED102Document24 pagesUED102Nik Noor Aisyah Mohd DaudNo ratings yet
- Corporal Punishment Versus Capital PunishmentDocument8 pagesCorporal Punishment Versus Capital PunishmentWac GunarathnaNo ratings yet
- The Flower of Services A Study On Private Universities in Sylhet CityDocument11 pagesThe Flower of Services A Study On Private Universities in Sylhet CityLatif AbdulNo ratings yet
- Nuisance or Natural and Healthy Should Monthly Menstruation Be Optional For Women PDFDocument3 pagesNuisance or Natural and Healthy Should Monthly Menstruation Be Optional For Women PDFDieWeisseLeserinNo ratings yet
- Alliance of Nationalist and Genuine Labor Org Vs Samahan NG Mga Mangagawang Nagkakaisa Sa Manila Bay Spinning MillsDocument8 pagesAlliance of Nationalist and Genuine Labor Org Vs Samahan NG Mga Mangagawang Nagkakaisa Sa Manila Bay Spinning MillspasmoNo ratings yet
- 2018 AACPM Curricular Guide PDFDocument327 pages2018 AACPM Curricular Guide PDFddNo ratings yet
- Assalamualaikum: Restu Kamila Dewi Agasty, S.PD., GRDocument19 pagesAssalamualaikum: Restu Kamila Dewi Agasty, S.PD., GRridwanNo ratings yet
- Song - Nothing Man by Pearl JamDocument4 pagesSong - Nothing Man by Pearl JamLeticia PlazaNo ratings yet