You might also like
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- 2024 - 03 - 20 M5 - Base - F450 - LQFP - BomDocument6 pages2024 - 03 - 20 M5 - Base - F450 - LQFP - BomMariano Rodriguez MosqueraNo ratings yet
- Battery Charger Parts ListDocument2 pagesBattery Charger Parts ListoloserNo ratings yet
- Mapping Komponen RepairDocument18 pagesMapping Komponen RepairoktavianNo ratings yet
- Physics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSIFrom EverandPhysics and Technology of Crystalline Oxide Semiconductor CAAC-IGZO: Application to LSINo ratings yet
- # Part Number Manufacturer Part NumberDocument9 pages# Part Number Manufacturer Part NumberAgler CuevaNo ratings yet
- HVRescue Shield r21 BOMDocument1 pageHVRescue Shield r21 BOMSorrawat MankitNo ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Final 33Document5 pagesFinal 33SumanNo ratings yet
- Index Quantity Part Number Manufacturer Part NumberDocument3 pagesIndex Quantity Part Number Manufacturer Part NumbersmtplvikasNo ratings yet
- Index Quantity Part Number Manufacturer Part NumberDocument3 pagesIndex Quantity Part Number Manufacturer Part NumberEdwardRodriguezNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Item Code Description Unit Qty. Value (USD)Document2 pagesItem Code Description Unit Qty. Value (USD)madhavNo ratings yet
- Item Code Description Unit Qty. Value (USD)Document2 pagesItem Code Description Unit Qty. Value (USD)madhavNo ratings yet
- Beginning Digital Electronics through ProjectsFrom EverandBeginning Digital Electronics through ProjectsRating: 5 out of 5 stars5/5 (1)
- Item Code Description Unit Qty. Value (USD)Document3 pagesItem Code Description Unit Qty. Value (USD)madhavNo ratings yet
- Audio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsFrom EverandAudio IC Projects: A Collection of Useful Circuits Based on Readily Available ChipsNo ratings yet
- BOM - Rev-1 For SupreethDocument6 pagesBOM - Rev-1 For Supreethgautamkr15No ratings yet
- Electrical Characterization of Organic Electronic Materials and DevicesFrom EverandElectrical Characterization of Organic Electronic Materials and DevicesNo ratings yet
- Service Manual: SpecificationDocument34 pagesService Manual: SpecificationAssistência Doctor Beats100% (1)
- Transistor Electronics: Use of Semiconductor Components in Switching OperationsFrom EverandTransistor Electronics: Use of Semiconductor Components in Switching OperationsRating: 1 out of 5 stars1/5 (1)
- Sony kdl-22cx520 kdl-32cx520 cx523 kdl-40cx520 523 Chassis Az2g SMDocument43 pagesSony kdl-22cx520 kdl-32cx520 cx523 kdl-40cx520 523 Chassis Az2g SMHamza Abbasi Abbasi50% (2)
- SIVADocument2 pagesSIVAsaurabhNo ratings yet
- British Commercial Computer Digest: Pergamon Computer Data SeriesFrom EverandBritish Commercial Computer Digest: Pergamon Computer Data SeriesNo ratings yet
- SetupDocument26 pagesSetupJose Enrique Salais SigalaNo ratings yet
- Flexible Power Transmission: The HVDC OptionsFrom EverandFlexible Power Transmission: The HVDC OptionsRating: 5 out of 5 stars5/5 (1)
- 7-JULY-19 Excel WorksheetDocument14 pages7-JULY-19 Excel WorksheetVivek SinghNo ratings yet
- List Komponen: Mfr. No Manufacturer Description Order Qty. Price (USD) Ext.: (USD) (Rupiah) Dolar Ke RupiahDocument1 pageList Komponen: Mfr. No Manufacturer Description Order Qty. Price (USD) Ext.: (USD) (Rupiah) Dolar Ke RupiahSeptian Wahyu ArjunadyNo ratings yet
- Hannstar Inverter (Divtl0068-D2Document9 pagesHannstar Inverter (Divtl0068-D2TvcrepairNo ratings yet
- Kit - 618XR Parts Required: No Description BOM. QtyDocument8 pagesKit - 618XR Parts Required: No Description BOM. Qtyzarul arjuna0% (1)
- Description Manufacturer Reference Footprint Designation QNT Farnell ReicheltDocument2 pagesDescription Manufacturer Reference Footprint Designation QNT Farnell ReicheltBrent NelsonNo ratings yet
- PrimerCube MotherBoard V10 v2 (Bill of Materials)Document1 pagePrimerCube MotherBoard V10 v2 (Bill of Materials)PRED4T0R85No ratings yet
- Arduino Nano 3.1 BOMDocument2 pagesArduino Nano 3.1 BOMTyruiNo ratings yet
- UniversalDocument8 pagesUniversalMateus LoufaresNo ratings yet
- Sheet 1dDocument1 pageSheet 1ddocpot2008No ratings yet
- Sample BOM ReportDocument12 pagesSample BOM ReportFariz HidayatNo ratings yet
- Item Qty Value Package: PCB Core ComponentsDocument4 pagesItem Qty Value Package: PCB Core ComponentsMazariegôs JJNo ratings yet
- PC CMB Aux PCB v8 (Bill of Materials)Document1 pagePC CMB Aux PCB v8 (Bill of Materials)PRED4T0R85No ratings yet
- The SMD Code BookDocument229 pagesThe SMD Code Bookcvprata8832100% (3)
- Inventaire Unitech Novembre 2021Document2 pagesInventaire Unitech Novembre 2021douahchia rachedNo ratings yet
- Inventory Eastherm 1 20140627 PCBADocument1 pageInventory Eastherm 1 20140627 PCBAhuucuong060890No ratings yet
- Cuadro de Cargas Electricos Ii - Ee UltimoDocument17 pagesCuadro de Cargas Electricos Ii - Ee UltimoJUkarevi VicenteNo ratings yet
- Penawaran Panel RS. PARAMARTA BANDUNGDocument25 pagesPenawaran Panel RS. PARAMARTA BANDUNGPT.Artha Trimitra SelarasNo ratings yet
- Component ListDocument1 pageComponent ListArsalan AtharNo ratings yet
- Service Manual - : Issued in May 2008Document13 pagesService Manual - : Issued in May 2008tuttesoluzioniNo ratings yet
- Technical Manual: Stereo Integrated AmplifierDocument8 pagesTechnical Manual: Stereo Integrated AmplifiervideosonNo ratings yet
- United Chemi-Con Nichicon Nichicon Nichicon Kemet Kemet Kemet Nichicon Nichicon United Chemi-Con United Chemi-Con Panasonic PanasonicDocument2 pagesUnited Chemi-Con Nichicon Nichicon Nichicon Kemet Kemet Kemet Nichicon Nichicon United Chemi-Con United Chemi-Con Panasonic Panasonicsekhar203512No ratings yet
- TL Genius - Hub BomDocument3 pagesTL Genius - Hub Bomgautamkr15No ratings yet
- Master Part ListDocument4 pagesMaster Part ListMATHIVANNANNo ratings yet
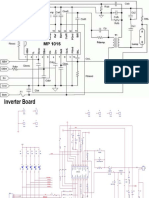
- Inverter mp1015 SCHDocument6 pagesInverter mp1015 SCHElectronica WuilnerNo ratings yet
- (CARLA) Orcamento GilbertoDocument1 page(CARLA) Orcamento GilbertoPedro NiyamaNo ratings yet
- PSW4000-SM Rev02Document26 pagesPSW4000-SM Rev02Willie LouwNo ratings yet
- Form 2 Physics Review QnsDocument37 pagesForm 2 Physics Review QnsMakame AliNo ratings yet
- Physics MCQDocument22 pagesPhysics MCQMubyNo ratings yet
- Volume Ii - 250kva Trensformers, Ner, Nic & Ancillary Electrical Equipment PDFDocument119 pagesVolume Ii - 250kva Trensformers, Ner, Nic & Ancillary Electrical Equipment PDFSunil G ParakkalNo ratings yet
- Reviewer in CircuitsDocument56 pagesReviewer in CircuitsMariz-Elaine Noceja RodriguezNo ratings yet
- Series - Parallel Circuit NotesDocument4 pagesSeries - Parallel Circuit NotesAnonymous v5QjDW2eHxNo ratings yet
- Figaro: For The Detection of Air ContaminantsDocument2 pagesFigaro: For The Detection of Air ContaminantsarfiarfiNo ratings yet
- Physics Practical 2023-24Document1 pagePhysics Practical 2023-24raunakNo ratings yet
- MEAC 101 2021-2022 SyllsbusDocument6 pagesMEAC 101 2021-2022 SyllsbusVELASCO JULIE-ANN G.No ratings yet
- JVC SR Chassis Av48p776 Projection TV SMDocument233 pagesJVC SR Chassis Av48p776 Projection TV SMJulio HernandezNo ratings yet
- Brake ChopperDocument16 pagesBrake Chopperaehque04No ratings yet
- Physics Paper 6 Revision NotesDocument5 pagesPhysics Paper 6 Revision NotesAmalia Korakaki88% (17)
- Info RightDocument18 pagesInfo RightMahessing BonamallyNo ratings yet
- Fan Circuit Tests InfoDocument21 pagesFan Circuit Tests InfomedNo ratings yet
- Siemens LU 5221Document0 pagesSiemens LU 5221ehincapiemNo ratings yet
- Lab 2Document2 pagesLab 2api-281150432No ratings yet
- New - Physics 502 In-Course Project-Calculus BasedDocument11 pagesNew - Physics 502 In-Course Project-Calculus BasedNoor AssignmentsNo ratings yet
- Palmer PDI-03 Part 2Document4 pagesPalmer PDI-03 Part 2Fernando Gómez100% (1)
- EEE Lab ReportDocument9 pagesEEE Lab Reportnurshakiblimon2018No ratings yet
- Chapter 4Document6 pagesChapter 4LTE002No ratings yet
- mrr1 eDocument18 pagesmrr1 eAyan MajiNo ratings yet
- A High-Capacity, High-Dielectric-Strength Relay Compatible With Momentary Voltage DropsDocument14 pagesA High-Capacity, High-Dielectric-Strength Relay Compatible With Momentary Voltage DropsRezaiguia RebaiNo ratings yet
- 1 Feasibility StudyDocument9 pages1 Feasibility Studysd7175239No ratings yet
- University of Cambridge International Examinations General Certificate of Education Advanced Subsidiary Level and Advanced LevelDocument12 pagesUniversity of Cambridge International Examinations General Certificate of Education Advanced Subsidiary Level and Advanced Level22shimmer22No ratings yet
- Electrical Circuits LABDocument42 pagesElectrical Circuits LABMustafa MhmoodNo ratings yet
- Robo Box3 ContructionEDocument36 pagesRobo Box3 ContructionEPato AcevedoNo ratings yet
- VN750 / VN750S VN750PT / VN750-B5: High Side DriverDocument31 pagesVN750 / VN750S VN750PT / VN750-B5: High Side DriverDan EsentherNo ratings yet
- Ncert Solution Cbse Class 10 Sci Chap 12Document18 pagesNcert Solution Cbse Class 10 Sci Chap 12Aaryan KumarNo ratings yet
- RLC Circuit Prelab ReportDocument4 pagesRLC Circuit Prelab Reportkuka musaNo ratings yet
- Smisen Introduction DeckDocument24 pagesSmisen Introduction Deckrcv4360% (1)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesFrom EverandINCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and ActivitiesRating: 5 out of 5 stars5/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Complete Electronics Self-Teaching Guide with ProjectsFrom EverandComplete Electronics Self-Teaching Guide with ProjectsRating: 3 out of 5 stars3/5 (2)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsFrom EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsRating: 3.5 out of 5 stars3.5/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)