You might also like
- Process System Value and Exergoeconomic Performance of Captive Power PlantsFrom EverandProcess System Value and Exergoeconomic Performance of Captive Power PlantsNo ratings yet
- Improvement of Boom Control Performance For Hybrid Hydra 2013 Automation inDocument9 pagesImprovement of Boom Control Performance For Hybrid Hydra 2013 Automation inJoseph JoseNo ratings yet
- Diagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceFrom EverandDiagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceNo ratings yet
- Actuators 10 00001 v2Document16 pagesActuators 10 00001 v2Amirul WiyatnoNo ratings yet
- ExcavatorEnergy savingEfficiencyBasedonDieselEngineDocument9 pagesExcavatorEnergy savingEfficiencyBasedonDieselEngineyusufNo ratings yet
- Actuators: Development and Evaluation of Energy-Saving Electro-Hydraulic ActuatorDocument27 pagesActuators: Development and Evaluation of Energy-Saving Electro-Hydraulic ActuatorAnonymous 7pJU2NFhANo ratings yet
- Numerical Analysis of Energy Recovery of Hybrid LoDocument23 pagesNumerical Analysis of Energy Recovery of Hybrid LoVũ Võ ĐạiNo ratings yet
- 2020 Energy Saving Strategies On Power Hydraulic System An OverviewDocument23 pages2020 Energy Saving Strategies On Power Hydraulic System An OverviewSetiawan Tuhu basukiNo ratings yet
- Artículo 1 PDFDocument9 pagesArtículo 1 PDFERNESTO RAFAEL BAZAN PADILLANo ratings yet
- Combined Cycle Power Plant Optimization Based On Supervisory Predictive ControllersDocument6 pagesCombined Cycle Power Plant Optimization Based On Supervisory Predictive ControllersGeovanny Efrain RamirezNo ratings yet
- Energy Saving SRPDocument13 pagesEnergy Saving SRPJose ContrerasNo ratings yet
- Optimal Operation Strategy of Multi-Energy Complementary Distributed CCHP System and Its Application On Commercial BuildingDocument11 pagesOptimal Operation Strategy of Multi-Energy Complementary Distributed CCHP System and Its Application On Commercial BuildingEko PrasetyoNo ratings yet
- A Comparative Study of Energy Management Schemes For A Fuel-Cell Hybrid Emergency Power System of More-Electric AircraftDocument15 pagesA Comparative Study of Energy Management Schemes For A Fuel-Cell Hybrid Emergency Power System of More-Electric AircraftSouf Hack-digitalNo ratings yet
- Hydraulics Excavator PDFDocument16 pagesHydraulics Excavator PDFChandaKunda100% (1)
- Comparative Energy Analysis of A Load Sensing SystDocument19 pagesComparative Energy Analysis of A Load Sensing SystMDLNo ratings yet
- Load Sensing HydraulicsDocument12 pagesLoad Sensing HydraulicsKishore Kandikunta100% (2)
- 06 2014 2138 Man 03Document11 pages06 2014 2138 Man 03MahmoudMaherNo ratings yet
- Hydraulic Component ModellingDocument18 pagesHydraulic Component ModellingRajesh MalikNo ratings yet
- Electrical Power and Energy SystemsDocument12 pagesElectrical Power and Energy Systemsswapna44No ratings yet
- Combined-Cycle Gas and Steam Turbine Power Plant Reliability AnalysisDocument27 pagesCombined-Cycle Gas and Steam Turbine Power Plant Reliability Analysistwana najih hassanNo ratings yet
- 2008 Truong QFTDocument20 pages2008 Truong QFTCumhur ÖzbaşNo ratings yet
- Matecconf Eureca2018 02011Document15 pagesMatecconf Eureca2018 02011Aseel QasaimehNo ratings yet
- Regenerative Braking System: Group GuideDocument14 pagesRegenerative Braking System: Group GuidePooja BanNo ratings yet
- Optimization of Energy Management of A Microgrid Based On Solar-Diesel-Battery Hybrid SystemDocument7 pagesOptimization of Energy Management of A Microgrid Based On Solar-Diesel-Battery Hybrid SystemAna ZornittaNo ratings yet
- Regenerative Braking StategyDocument10 pagesRegenerative Braking StategyAshwin SelvakumarNo ratings yet
- Minimum Time Current Controller Design For Two-Interleaved Bidirectional Converter: Application To Hybrid Fuel Cell/supercapacitor VehiclesDocument13 pagesMinimum Time Current Controller Design For Two-Interleaved Bidirectional Converter: Application To Hybrid Fuel Cell/supercapacitor VehiclesariphineNo ratings yet
- Optimization of Multi-Way Valve Structure in DigitDocument21 pagesOptimization of Multi-Way Valve Structure in DigitVũ Võ ĐạiNo ratings yet
- Preprints201708 0034 v1Document22 pagesPreprints201708 0034 v1Sergio M. JuniorNo ratings yet
- Mechatronics: Adrian Raisch, Oliver SawodnyDocument10 pagesMechatronics: Adrian Raisch, Oliver SawodnyMuhammad RizkiNo ratings yet
- Forging HydraulicDocument15 pagesForging HydraulicManibalanNo ratings yet
- Bahan Reading Hydraulic PneumaticDocument6 pagesBahan Reading Hydraulic PneumaticAhmad HaritsNo ratings yet
- Shymgen System - Optimizing The Performance of Shaft Generator and Drive Train On Fishing VesselsDocument6 pagesShymgen System - Optimizing The Performance of Shaft Generator and Drive Train On Fishing VesselsADRIANSF1No ratings yet
- Wevj 15 00048Document39 pagesWevj 15 00048jesusNo ratings yet
- Variable Speed Pumping in Thermal and Nuclear Power Plants: Frequency Converter Versus Hydrodynamic CouplingDocument7 pagesVariable Speed Pumping in Thermal and Nuclear Power Plants: Frequency Converter Versus Hydrodynamic CouplingNath BoyapatiNo ratings yet
- Energy Conversion and Management: A B B C DDocument15 pagesEnergy Conversion and Management: A B B C DJoseph JoseNo ratings yet
- Energy Efficient Hydraulic Systems and Regenerative CapabilitiesDocument13 pagesEnergy Efficient Hydraulic Systems and Regenerative Capabilitiesn3tr0xNo ratings yet
- Bueno Usar Figurasanalysis - of - Battery - Lifetime - Extension - in - A - Small-Scale - Wind-Energy - System - Using - SupercapacitorsDocument10 pagesBueno Usar Figurasanalysis - of - Battery - Lifetime - Extension - in - A - Small-Scale - Wind-Energy - System - Using - SupercapacitorsJonathan Muñoz TaboraNo ratings yet
- 3 RefDocument16 pages3 RefWesley Jeevadason (RA1913005011014)No ratings yet
- 1 s2.0 S0360544209003879 MainDocument8 pages1 s2.0 S0360544209003879 MainMohamed AlNo ratings yet
- Application of Buoyancy-Power Generator For Compressed Air Energy Storage Using A Fluid-Air Displacement System - ScienceDirectDocument7 pagesApplication of Buoyancy-Power Generator For Compressed Air Energy Storage Using A Fluid-Air Displacement System - ScienceDirectJoel Stanley TylerNo ratings yet
- Power Consumption Optimization For Multiple Parallel Centrifugal PumpsDocument6 pagesPower Consumption Optimization For Multiple Parallel Centrifugal PumpshachanNo ratings yet
- How To Guide: Converting Hydraulic Cylinders To An Electric Actuator AlternativeDocument16 pagesHow To Guide: Converting Hydraulic Cylinders To An Electric Actuator AlternativeCarlos H. CarneiroNo ratings yet
- Modeling Innovative Power Take Off Based On Double Acting Hydraulic Cylinders Array For Wave Energy ConversionDocument39 pagesModeling Innovative Power Take Off Based On Double Acting Hydraulic Cylinders Array For Wave Energy ConversionMohamed SaidNo ratings yet
- Energies: Electrification of A Heavy-Duty CI Truck-Comparison of Electric Turbocharger and Crank Shaft MotorDocument21 pagesEnergies: Electrification of A Heavy-Duty CI Truck-Comparison of Electric Turbocharger and Crank Shaft Motorhektor AtkinsonNo ratings yet
- Journal Paper ODzoboDocument27 pagesJournal Paper ODzoboodzoboNo ratings yet
- Electrical Power and Energy Systems: Ce Shang, Dipti Srinivasan, Thomas ReindlDocument14 pagesElectrical Power and Energy Systems: Ce Shang, Dipti Srinivasan, Thomas ReindlChaabane BOUALINo ratings yet
- Research Paper 5Document8 pagesResearch Paper 5TUF TETRATONNo ratings yet
- Control and Simulation of Hybrid Power Generation System Operating in Grid Connected and Stand Alone ModeDocument7 pagesControl and Simulation of Hybrid Power Generation System Operating in Grid Connected and Stand Alone Moderobert brownNo ratings yet
- Research Article: Observer-Based Robust Control For Hydraulic Velocity Control SystemDocument10 pagesResearch Article: Observer-Based Robust Control For Hydraulic Velocity Control SystemNehal ANo ratings yet
- Energy Management Strategy For Battery - Supercapacitor - Fuel Cell Hybrid Source Vehicles Based On Finite State MachineDocument13 pagesEnergy Management Strategy For Battery - Supercapacitor - Fuel Cell Hybrid Source Vehicles Based On Finite State MachineAngel SilvaNo ratings yet
- Hybrid Energy SystemsDocument15 pagesHybrid Energy SystemsChris StillNo ratings yet
- EnergyConv EMS Ariel PDFDocument11 pagesEnergyConv EMS Ariel PDFChicheNo ratings yet
- Design Hybrid Solar-Wind-Diesel Power SysDocument6 pagesDesign Hybrid Solar-Wind-Diesel Power SysNoor Ul AinNo ratings yet
- Comparative Performance Analysis of Teaching Learning Based Optimization For Automatic Load Frequency Control of Multi-Source Power SystemDocument11 pagesComparative Performance Analysis of Teaching Learning Based Optimization For Automatic Load Frequency Control of Multi-Source Power Systemiraj FarajiNo ratings yet
- Experimental Investigation On Off-Design Performance and AdjustmentDocument9 pagesExperimental Investigation On Off-Design Performance and AdjustmentShivani SNo ratings yet
- Engineering Perspective: Modeling The Vehicle Movement and Braking Effect of The Hydrostatic Regenerative Braking SystemDocument9 pagesEngineering Perspective: Modeling The Vehicle Movement and Braking Effect of The Hydrostatic Regenerative Braking SystemMustafa KaramanNo ratings yet
- Pre and Post CompensationDocument10 pagesPre and Post CompensationRitesh SinghNo ratings yet
- Adaptive Terminal Sliding Mode Control For Hybrid Energy Storage Systems of Fuel Cell Battery and SupercapacitorDocument9 pagesAdaptive Terminal Sliding Mode Control For Hybrid Energy Storage Systems of Fuel Cell Battery and SupercapacitorAnonymous xaeuoo4No ratings yet
- Volltext PDFDocument11 pagesVolltext PDFa.monem ShoalaNo ratings yet
- 2020 Ditrolio ''A Hybrid Power-Unit Based On A Passive Fuel Cellbattery System For Light Weight Vehicles''Document11 pages2020 Ditrolio ''A Hybrid Power-Unit Based On A Passive Fuel Cellbattery System For Light Weight Vehicles''Abdul RehmanNo ratings yet
- NOSHOK Pressure Switches White PaperDocument6 pagesNOSHOK Pressure Switches White PaperJoseph JoseNo ratings yet
- Energy Conversion and Management: A B B C DDocument15 pagesEnergy Conversion and Management: A B B C DJoseph JoseNo ratings yet
- PID Controls:: Hydraulic Design Game ChangerDocument36 pagesPID Controls:: Hydraulic Design Game ChangerJoseph JoseNo ratings yet
- Hose Reliability Isn'T A: StretchDocument38 pagesHose Reliability Isn'T A: StretchJoseph JoseNo ratings yet
- An Engineer's Guide To Selecting A Pressure Relief Valve (Updated 3.3.21)Document17 pagesAn Engineer's Guide To Selecting A Pressure Relief Valve (Updated 3.3.21)Joseph JoseNo ratings yet
- (97c1efe3 Be1b 4bec 9308 D1d9eacf9024) PS20022 Thermal ManagementDocument2 pages(97c1efe3 Be1b 4bec 9308 D1d9eacf9024) PS20022 Thermal ManagementJoseph JoseNo ratings yet
- Multi-Classification by Using Tri-Class SVMDocument13 pagesMulti-Classification by Using Tri-Class SVMJoseph JoseNo ratings yet
- SVM Parameter Optimization Using Grid Search and GDocument8 pagesSVM Parameter Optimization Using Grid Search and GJoseph JoseNo ratings yet
- Neurocomputing: Yukun Bao, Zhongyi Hu, Tao XiongDocument9 pagesNeurocomputing: Yukun Bao, Zhongyi Hu, Tao XiongJoseph JoseNo ratings yet
- Sensors: Event-Based Feature Extraction Using Adaptive Selection ThresholdsDocument24 pagesSensors: Event-Based Feature Extraction Using Adaptive Selection ThresholdsJoseph JoseNo ratings yet
- Mechanical Systems and Signal Processing: Wei Li, Zhencai Zhu, Fan Jiang, Gongbo Zhou, Guoan ChenDocument13 pagesMechanical Systems and Signal Processing: Wei Li, Zhencai Zhu, Fan Jiang, Gongbo Zhou, Guoan ChenJoseph JoseNo ratings yet
- Pattern Recognition and AI Using Matlab Textbook PDFDocument263 pagesPattern Recognition and AI Using Matlab Textbook PDFJoseph JoseNo ratings yet
- Event-Driven Data Acquisition and Digital Signal Processing-A TutorialDocument5 pagesEvent-Driven Data Acquisition and Digital Signal Processing-A TutorialJoseph JoseNo ratings yet
- 10 1016@j Isatra 2019 11 006Document32 pages10 1016@j Isatra 2019 11 006Joseph JoseNo ratings yet
- Feature Selection Via Sensitivity Analysis of SVM Probabilistic OutputsDocument20 pagesFeature Selection Via Sensitivity Analysis of SVM Probabilistic OutputsJoseph JoseNo ratings yet
- Fault Classification of Uid Power Systems Using A Dynamics Feature Extraction Technique and Neural NetworksDocument11 pagesFault Classification of Uid Power Systems Using A Dynamics Feature Extraction Technique and Neural NetworksJoseph JoseNo ratings yet
- Feature Selection For SVMS: by J. Weston, S. Mukherjee, O. Chapelle, M. Pontil, T. Poggio, V. VapnikDocument19 pagesFeature Selection For SVMS: by J. Weston, S. Mukherjee, O. Chapelle, M. Pontil, T. Poggio, V. VapnikJoseph JoseNo ratings yet
- Feedback Linearisation Applied On A Hydraulic ServDocument7 pagesFeedback Linearisation Applied On A Hydraulic ServJoseph JoseNo ratings yet
- IMECE2003-41457: Multi Criteria Design Optimization of Backhoe Loader Front MechanismDocument7 pagesIMECE2003-41457: Multi Criteria Design Optimization of Backhoe Loader Front MechanismJoseph JoseNo ratings yet
- Evaluation of Single-Bucket Excavators Energy Consumption: SciencedirectDocument6 pagesEvaluation of Single-Bucket Excavators Energy Consumption: SciencedirectJoseph JoseNo ratings yet
- Fault Detection Identification and Accommodation For An Electrohydraulic System An Adaptive Robust ApproachDocument6 pagesFault Detection Identification and Accommodation For An Electrohydraulic System An Adaptive Robust ApproachJoseph JoseNo ratings yet
- Phy02 Co2 2223Document17 pagesPhy02 Co2 2223kram ichuNo ratings yet
- Lab PDFDocument8 pagesLab PDFAnonymous HZXRbzPkzNo ratings yet
- Relay Symbols and Electromagnets: Go To WebsiteDocument5 pagesRelay Symbols and Electromagnets: Go To Websiteuday kumarNo ratings yet
- LG Flatron E700SHDocument2 pagesLG Flatron E700SHjayakarwNo ratings yet
- Valvula Proporcional Série d633 e d634Document16 pagesValvula Proporcional Série d633 e d634Lucas Vinícius CostaNo ratings yet
- JVC Hxd77uj 494014 15 12 2010Document57 pagesJVC Hxd77uj 494014 15 12 2010Cuthbert MarshallNo ratings yet
- Report ProjectDocument8 pagesReport ProjectNadeemNo ratings yet
- IEEE Standard For Transient Overvoltage Protection of DC Electrification Systems by Application of DC Surge ArrestersDocument15 pagesIEEE Standard For Transient Overvoltage Protection of DC Electrification Systems by Application of DC Surge ArrestersAbhijeet Kumar SinghNo ratings yet
- Manual - CRATE, BassAmp PDFDocument8 pagesManual - CRATE, BassAmp PDFwiseeapNo ratings yet
- Project - Water Level Alarm Using 555 TimerDocument16 pagesProject - Water Level Alarm Using 555 TimerAnuragNo ratings yet
- This Answer Was Provided by CS Place, Click To Join The DiscordDocument2 pagesThis Answer Was Provided by CS Place, Click To Join The DiscordMetin KorkutNo ratings yet
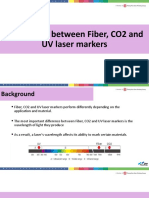
- Laser Marking PresentationDocument20 pagesLaser Marking Presentationไทยคม ผิวปานแก้วNo ratings yet
- Samsung GT-N8000 Service ManualDocument84 pagesSamsung GT-N8000 Service ManualMario DeejayNo ratings yet
- XP95A - Mini Switch Monitor ModuleDocument2 pagesXP95A - Mini Switch Monitor ModuleguilhermegomNo ratings yet
- Resistors, Ohms Law, and The Passive Sign ConventionDocument3 pagesResistors, Ohms Law, and The Passive Sign ConventionhemantNo ratings yet
- Grid Scale Battery StorageDocument8 pagesGrid Scale Battery StoragetyaskartikaNo ratings yet
- A3941 PDFDocument20 pagesA3941 PDFEzequiel AriasNo ratings yet
- EC8452 - ELECTRONIC CIRCUITS II (2 Units) - ECE - YEAR - 2 - SEM - 4Document3 pagesEC8452 - ELECTRONIC CIRCUITS II (2 Units) - ECE - YEAR - 2 - SEM - 4santhosh sekarNo ratings yet
- Motorola1981-82OptoelectronicDataBook Text PDFDocument287 pagesMotorola1981-82OptoelectronicDataBook Text PDFFLAVIONo ratings yet
- VFD Trouble-Shooting Tips SP Drives Rev4-1Document5 pagesVFD Trouble-Shooting Tips SP Drives Rev4-1Amrit AgarwalNo ratings yet
- A 90 PCSCDocument87 pagesA 90 PCSCnassarkiNo ratings yet
- Sensor and TransducerDocument15 pagesSensor and Transducerrashmi patil100% (1)
- Touareg 4.2Document36 pagesTouareg 4.2zozo0424No ratings yet
- Electrical Design - Dax Generators: © BRUSH GroupDocument66 pagesElectrical Design - Dax Generators: © BRUSH GroupKyleNo ratings yet
- IOT Paralysis Patient Health Care ProjectDocument3 pagesIOT Paralysis Patient Health Care Projectstar100% (2)
- Buildings Utilities 2Document21 pagesBuildings Utilities 2Rachel PetersNo ratings yet
- Sensor Linea Type 9195G PDFDocument2 pagesSensor Linea Type 9195G PDFAnonymous lx0DDKNo ratings yet
- EASSDocument64 pagesEASSWaqas AhmedNo ratings yet
- MR394X8586D000Document48 pagesMR394X8586D000Nick Buzatu100% (2)
- HP EQUIVWPN-wmDocument16 pagesHP EQUIVWPN-wmstruja2010No ratings yet
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- Building Energy Management Systems and Techniques: Principles, Methods, and ModellingFrom EverandBuilding Energy Management Systems and Techniques: Principles, Methods, and ModellingNo ratings yet
- The Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialFrom EverandThe Complete HVAC BIBLE for Beginners: The Most Practical & Updated Guide to Heating, Ventilation, and Air Conditioning Systems | Installation, Troubleshooting and Repair | Residential & CommercialNo ratings yet
- Electric Motor Control: DC, AC, and BLDC MotorsFrom EverandElectric Motor Control: DC, AC, and BLDC MotorsRating: 4.5 out of 5 stars4.5/5 (19)
- Idaho Falls: The Untold Story of America's First Nuclear AccidentFrom EverandIdaho Falls: The Untold Story of America's First Nuclear AccidentRating: 4.5 out of 5 stars4.5/5 (21)
- Electric Motors and Drives: Fundamentals, Types and ApplicationsFrom EverandElectric Motors and Drives: Fundamentals, Types and ApplicationsRating: 4.5 out of 5 stars4.5/5 (12)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- Well Integrity for Workovers and RecompletionsFrom EverandWell Integrity for Workovers and RecompletionsRating: 5 out of 5 stars5/5 (3)
- Well Control for Completions and InterventionsFrom EverandWell Control for Completions and InterventionsRating: 4 out of 5 stars4/5 (10)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Handbook on Battery Energy Storage SystemFrom EverandHandbook on Battery Energy Storage SystemRating: 4.5 out of 5 stars4.5/5 (2)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Thermal Power Plant: Design and OperationFrom EverandThermal Power Plant: Design and OperationRating: 4.5 out of 5 stars4.5/5 (23)
- Air Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&AFrom EverandAir Cooled Heat Exchanger Handbook: Fundamentals, Calculations, Design and Q&ANo ratings yet
- Asphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsFrom EverandAsphaltene Deposition Control by Chemical Inhibitors: Theoretical and Practical ProspectsNo ratings yet
- Pipeline and Energy Plant Piping: Design and TechnologyFrom EverandPipeline and Energy Plant Piping: Design and TechnologyRating: 5 out of 5 stars5/5 (2)
- Photovoltaic Solar Energy: From Fundamentals to ApplicationsFrom EverandPhotovoltaic Solar Energy: From Fundamentals to ApplicationsNo ratings yet
- Smart Power Distribution Systems: Control, Communication, and OptimizationFrom EverandSmart Power Distribution Systems: Control, Communication, and OptimizationNo ratings yet
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- An Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksFrom EverandAn Introduction to Renewable Energy Sources : Environment Books for Kids | Children's Environment BooksNo ratings yet