You might also like
- Abhishek U Nair SeminarDocument34 pagesAbhishek U Nair SeminarAju KrishnaNo ratings yet
- Eye Controlled Wheelchair Using Transfer LearningDocument5 pagesEye Controlled Wheelchair Using Transfer Learninglohith sNo ratings yet
- Three-Dimensional Holographic ImagingFrom EverandThree-Dimensional Holographic ImagingChung J. KuoRating: 5 out of 5 stars5/5 (1)
- Eye Movement Controlled Wheelchair in 40 CharactersDocument16 pagesEye Movement Controlled Wheelchair in 40 CharactersMrinalsheNo ratings yet
- Voice wheel chair gps GPCDocument65 pagesVoice wheel chair gps GPCsakthi velNo ratings yet
- Bby Inc Report-1Document80 pagesBby Inc Report-1SAMPATH KUMAR.J MCE-LECT/ECENo ratings yet
- Automatic Driver Drowsiness Detector Using Convolution Neural NetworksDocument5 pagesAutomatic Driver Drowsiness Detector Using Convolution Neural NetworksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Wheelchair Controlled by Speech and VisionDocument6 pagesWheelchair Controlled by Speech and VisionIJRASETPublicationsNo ratings yet
- E.O.G. Guidance of A Wheelchair Using Neural NetworksDocument4 pagesE.O.G. Guidance of A Wheelchair Using Neural Networksjainprateek10aNo ratings yet
- Ecw PPT Final PPT For PresentationDocument32 pagesEcw PPT Final PPT For PresentationSai SaranNo ratings yet
- Phase 1Document13 pagesPhase 1APS PlacementsNo ratings yet
- Assisted Mobility System Using Eye Movements Based on ElectrooculographyDocument23 pagesAssisted Mobility System Using Eye Movements Based on ElectrooculographyRamanan SubramanianNo ratings yet
- Documentation of Final Year ProjectDocument19 pagesDocumentation of Final Year ProjectAdwitiya Dutta ChowdhuryNo ratings yet
- Eye Monitored Wheelchair Control For People Suffering From QuadriplegiaDocument34 pagesEye Monitored Wheelchair Control For People Suffering From Quadriplegiamont21No ratings yet
- Eye Movement Analysis For Activity RecognitionDocument26 pagesEye Movement Analysis For Activity RecognitionSachin MathewNo ratings yet
- 3.3.5 - 146 - A Device Controlled Using Eye MovementDocument4 pages3.3.5 - 146 - A Device Controlled Using Eye MovementPooja ChendakeNo ratings yet
- Driver Fatigue Detection Based On Eye TrackingDocument2 pagesDriver Fatigue Detection Based On Eye TrackingAnonymous jxm0WNS7QaNo ratings yet
- Eye-Controlled Wheelchair SystemDocument31 pagesEye-Controlled Wheelchair Systemmanoj100% (1)
- E PATIENT FINAL COPY 9 5 23Document47 pagesE PATIENT FINAL COPY 9 5 236055 - Ragul TNo ratings yet
- Obstacle Detection For A Speech ControllDocument100 pagesObstacle Detection For A Speech ControllVladan StanojevićNo ratings yet
- Eyeball Operated Wheelchair For Locked in Syndrome PatientDocument4 pagesEyeball Operated Wheelchair For Locked in Syndrome PatientInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Brain Port Vision Device Seminar ReportDocument29 pagesBrain Port Vision Device Seminar Reportlogukavi2002No ratings yet
- Sensor Based Eye Controlled Automated Wheelchair: Shreyasi Samanta and Mrs. R DayanaDocument4 pagesSensor Based Eye Controlled Automated Wheelchair: Shreyasi Samanta and Mrs. R DayanaSwapna GanigaNo ratings yet
- Driver AlternessDocument61 pagesDriver Alternessbrainburst0001No ratings yet
- "Blind Indoor Navigation Using Ultrasonic Sensor": Submitted To: Prof. Anand Kumar SDocument13 pages"Blind Indoor Navigation Using Ultrasonic Sensor": Submitted To: Prof. Anand Kumar SAvk Aryan Vishant KulshreshthaNo ratings yet
- Eye Movement Controlled WheelchairDocument16 pagesEye Movement Controlled Wheelchairananda kumar mNo ratings yet
- Tongue Motion Controlled WheelchairDocument6 pagesTongue Motion Controlled Wheelchairhichem sabiNo ratings yet
- Andrei M. Shkel - Pedestrian Inertial Navigation With Self-Contained Aiding (IEEE Press Series On Sensors) - Wiley-IEEE Press (2021)Document193 pagesAndrei M. Shkel - Pedestrian Inertial Navigation With Self-Contained Aiding (IEEE Press Series On Sensors) - Wiley-IEEE Press (2021)williamateugeniodiazNo ratings yet
- Major Project ReportDocument41 pagesMajor Project ReportAnshul jainNo ratings yet
- Controlled Wheelchair Based On Brain Computer Interface Using Neurosky Mindwave Mobile 2Document8 pagesControlled Wheelchair Based On Brain Computer Interface Using Neurosky Mindwave Mobile 2MD IMRAN HOSSEN RAKIBNo ratings yet
- CPP Project Corrected Latest 2Document27 pagesCPP Project Corrected Latest 2Ajit GawareNo ratings yet
- Patient Monitoring System Using Zigbee and GSMDocument63 pagesPatient Monitoring System Using Zigbee and GSMAzhagesvaran TamilselvamNo ratings yet
- Drowsiness Driving Detection, Prediction and Warning Drowsiness DetectionDocument6 pagesDrowsiness Driving Detection, Prediction and Warning Drowsiness DetectionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Auto Comforted Wheelchair For QuadriplegicsDocument5 pagesAuto Comforted Wheelchair For QuadriplegicsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Eog-Based Signal Detection and Verification For HciDocument7 pagesEog-Based Signal Detection and Verification For HciAbhinav GuptaNo ratings yet
- Electro-Oculogy Seminar ReportDocument32 pagesElectro-Oculogy Seminar ReportshaikmustaqNo ratings yet
- Eye TrckerDocument9 pagesEye TrckerMustaphaBenselkaNo ratings yet
- Drowsiness Detection Using Eye Blinks and IR SensorsDocument82 pagesDrowsiness Detection Using Eye Blinks and IR SensorsSaitejaNo ratings yet
- Bachelors FYP ReportDocument51 pagesBachelors FYP ReportMuhmmad Sohaib KhalidNo ratings yet
- Driver Drowsiness and Fatigue Detection System A ReviewDocument4 pagesDriver Drowsiness and Fatigue Detection System A ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Project Report ON Assistive Mars RoverDocument9 pagesProject Report ON Assistive Mars RoverSafalsha BabuNo ratings yet
- Eye Tracking Based Driver Fatigue Monitoring and WarningDocument30 pagesEye Tracking Based Driver Fatigue Monitoring and WarningHARDEEP SINGH100% (2)
- 1.1 Problem StatementDocument11 pages1.1 Problem StatementAbhay BhanoteNo ratings yet
- Hand Gesture Controlled Wheelchair Using AccelerometerDocument6 pagesHand Gesture Controlled Wheelchair Using Accelerometerahmed mediaNo ratings yet
- Drowsiness DetectionDocument5 pagesDrowsiness DetectionThu NguyễnNo ratings yet
- Eye Directive Wheelchair@Fnl-1Document21 pagesEye Directive Wheelchair@Fnl-1Swaraj Kumar SwainNo ratings yet
- Final ReportDocument22 pagesFinal Reportdikshacm22hecseNo ratings yet
- Driver Drowsiness Detection - (Sample) Project Synopsis ReportDocument16 pagesDriver Drowsiness Detection - (Sample) Project Synopsis ReportRitik SinghNo ratings yet
- Driver Drowsiness Detection Techniques SurveyDocument4 pagesDriver Drowsiness Detection Techniques SurveyAshish JadhavNo ratings yet
- 4EC - Project (1) (Repaired) NDocument26 pages4EC - Project (1) (Repaired) NWunna HtooNo ratings yet
- IR Sensor Based Drowsiness Detecting During Driving SystemDocument3 pagesIR Sensor Based Drowsiness Detecting During Driving SystemsasaddaNo ratings yet
- AnEye TrackingBasedWirelessControlSystemDocument12 pagesAnEye TrackingBasedWirelessControlSystemDHRUBAJIT KAKATINo ratings yet
- Thesis 108EI038 026Document48 pagesThesis 108EI038 026Amit DostNo ratings yet
- Hardware Implementation Based On Head Movement Using Accelerometer SensorDocument5 pagesHardware Implementation Based On Head Movement Using Accelerometer SensorRatakarn BunteeNo ratings yet
- HOOOOOOODocument16 pagesHOOOOOOOSaranya. M SNSNo ratings yet
- Technical ReportDocument39 pagesTechnical ReportHaripriyaNo ratings yet
- Identification of saccades in Electrooculograms for Dasher controlDocument6 pagesIdentification of saccades in Electrooculograms for Dasher controlJuan Diego Pulgarín-GiraldoNo ratings yet
- A Project Report On: Ultrasonic Blind Walking StickDocument29 pagesA Project Report On: Ultrasonic Blind Walking StickprateshNo ratings yet
- Distribution Systems 101 Stewart-Schneider PDFDocument48 pagesDistribution Systems 101 Stewart-Schneider PDFjohn rommel abrigoNo ratings yet
- Eds 1st Unit AssignmentDocument18 pagesEds 1st Unit Assignmentsanthosh kumarNo ratings yet
- ECET Scholarship Test for 2nd Year Diploma StudentsDocument2 pagesECET Scholarship Test for 2nd Year Diploma Studentssanthosh kumarNo ratings yet
- Automatic Traffic Lights Control Using Density Based AlgorithmDocument12 pagesAutomatic Traffic Lights Control Using Density Based Algorithmsanthosh kumarNo ratings yet
- PsocDocument3 pagesPsocsanthosh kumarNo ratings yet
- PSD Mid QuestionsDocument2 pagesPSD Mid Questionssanthosh kumarNo ratings yet
- 1.activities On Fundamentals of Inter-Personal CommunicationDocument5 pages1.activities On Fundamentals of Inter-Personal Communicationsunil gatadiNo ratings yet
- Scanned by CamscannerDocument3 pagesScanned by Camscannersanthosh kumarNo ratings yet
- New Doc 2019-09-10 18.40.11Document10 pagesNew Doc 2019-09-10 18.40.11santhosh kumarNo ratings yet
- ScriptDocument5 pagesScriptsanthosh kumarNo ratings yet
- New Doc 2019-01-05 12.20.46Document2 pagesNew Doc 2019-01-05 12.20.46santhosh kumarNo ratings yet
- Cam Tech Hitachi TM El Locoeng 05Document58 pagesCam Tech Hitachi TM El Locoeng 05santhosh kumarNo ratings yet
- Out Put TransDocument7 pagesOut Put Transsanthosh kumarNo ratings yet
- Speed Control of MotorDocument2 pagesSpeed Control of Motorsanthosh kumarNo ratings yet
- HVDC AnswersDocument27 pagesHVDC Answerssanthosh kumarNo ratings yet
- Wa0020Document1 pageWa0020santhosh kumarNo ratings yet
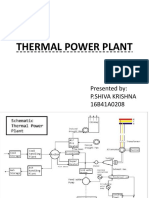
- Thermal Power Plant Components: Boiler, Super Heater, Turbine, AlternatorDocument6 pagesThermal Power Plant Components: Boiler, Super Heater, Turbine, Alternatorsanthosh kumarNo ratings yet
- Nuclear Battery: Ajay Mahato, Ajay Kumar Pal, Dr. Bhagwan Shree Ram (Prof.), Mr. Basavareddy (Prof.)Document6 pagesNuclear Battery: Ajay Mahato, Ajay Kumar Pal, Dr. Bhagwan Shree Ram (Prof.), Mr. Basavareddy (Prof.)santhosh kumarNo ratings yet
- Bhagyashri's ResumeDocument1 pageBhagyashri's ResumeRiya SharmaNo ratings yet
- Mastermind Game1Document9 pagesMastermind Game1meenahilNo ratings yet
- RF Syncing to StrataSync using an ONX-620/630 in 40 CharactersDocument2 pagesRF Syncing to StrataSync using an ONX-620/630 in 40 Charactersomar cribas pinedaNo ratings yet
- Matrix COSEC ARGO FACE PresentationDocument30 pagesMatrix COSEC ARGO FACE PresentationreilyshawnNo ratings yet
- UFT Install GuideDocument57 pagesUFT Install GuideRavi RanjanNo ratings yet
- Auto CADDocument2 pagesAuto CADKatherine CabreraNo ratings yet
- PCA 6143man PDFDocument102 pagesPCA 6143man PDFLuis Alberto Díaz OlmedoNo ratings yet
- Datasheet AMD Alchemy Au1100Document414 pagesDatasheet AMD Alchemy Au1100Cosmin CodrescuNo ratings yet
- Newbie's Guide To AVR TimersDocument23 pagesNewbie's Guide To AVR TimersNitish Kumar100% (1)
- BCA Project - Visual Basic (VB) Bookshop Management System - PDF Report With Source Code Free..Document45 pagesBCA Project - Visual Basic (VB) Bookshop Management System - PDF Report With Source Code Free..रोहित कोल्हे100% (1)
- Bits Pilani Wilp - Sem-2 Electives Course DetailsDocument11 pagesBits Pilani Wilp - Sem-2 Electives Course DetailsSangam Jindal100% (1)
- Aim of Experiment: Write A Program To Read Temperature From Sensor (LM35) and Display It in LCDDocument8 pagesAim of Experiment: Write A Program To Read Temperature From Sensor (LM35) and Display It in LCDChandra SekharNo ratings yet
- AxxonNext User GuideDocument453 pagesAxxonNext User GuideSebastian GrochowskiNo ratings yet
- Delta Ia-Osw Diadesigner-Ax Um Eng 20210219Document417 pagesDelta Ia-Osw Diadesigner-Ax Um Eng 20210219Евгений ЛогиновNo ratings yet
- Assinment 2nd SemDocument84 pagesAssinment 2nd Semdlpvrm57No ratings yet
- Geographic Map Shapes For Microsoft VisioDocument3 pagesGeographic Map Shapes For Microsoft VisioElizabeth RamosNo ratings yet
- Comparison Chart For Real-Time GPS Tracking DevicesDocument4 pagesComparison Chart For Real-Time GPS Tracking Devicesserena8673No ratings yet
- Driver Installation Instruction_1_0Document2 pagesDriver Installation Instruction_1_0Victor LugoNo ratings yet
- Caliber Ilims Features Flipbook PDF - CompressDocument34 pagesCaliber Ilims Features Flipbook PDF - CompressTanaspohorn KaokaewNo ratings yet
- Computing InformaticsDocument255 pagesComputing Informaticssnmali100% (1)
- Configuring DB2 For TSM On Unix PlatformDocument3 pagesConfiguring DB2 For TSM On Unix PlatformMujahid Ali KhanNo ratings yet
- This Study Resource Was: EC-2 Regular Sample SolutionsDocument3 pagesThis Study Resource Was: EC-2 Regular Sample SolutionsRajesh BhardwajNo ratings yet
- MS-7091 M-ATX MainboardDocument25 pagesMS-7091 M-ATX Mainboardstrangelove91No ratings yet
- Bugreport Alioth - Id RKQ1.200826.002 2022 06 20 21 15 13 Dumpstate - Log 9162Document34 pagesBugreport Alioth - Id RKQ1.200826.002 2022 06 20 21 15 13 Dumpstate - Log 9162Setyo WatiNo ratings yet
- Spectrum Southbound Gateway ENUDocument70 pagesSpectrum Southbound Gateway ENUJose MezaNo ratings yet
- Arduino UNO Based System To Monitor The Cooling Process of Hot FluidDocument8 pagesArduino UNO Based System To Monitor The Cooling Process of Hot FluidIJRASETPublicationsNo ratings yet
- Internal Tables and Field Strings in ABAP/4 ProgrammingDocument31 pagesInternal Tables and Field Strings in ABAP/4 ProgrammingDr. Amresh NikamNo ratings yet
- CPT T TrainingDocument54 pagesCPT T TrainingSalvador FayssalNo ratings yet
- MEDUSA4Personal Installation GuideDocument12 pagesMEDUSA4Personal Installation GuideMiruna MetesNo ratings yet
- Company Process Written Exam Interview DetailsDocument2 pagesCompany Process Written Exam Interview DetailsAnkit BansalNo ratings yet
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (57)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- The Technology Trap: Capital, Labor, and Power in the Age of AutomationFrom EverandThe Technology Trap: Capital, Labor, and Power in the Age of AutomationRating: 4.5 out of 5 stars4.5/5 (46)
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (80)
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (242)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureFrom EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureRating: 5 out of 5 stars5/5 (125)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1395)
- Mini Farming: Self-Sufficiency on 1/4 AcreFrom EverandMini Farming: Self-Sufficiency on 1/4 AcreRating: 4 out of 5 stars4/5 (76)
- 35 Miles From Shore: The Ditching and Rescue of ALM Flight 980From Everand35 Miles From Shore: The Ditching and Rescue of ALM Flight 980Rating: 4 out of 5 stars4/5 (21)
- The Weather Machine: A Journey Inside the ForecastFrom EverandThe Weather Machine: A Journey Inside the ForecastRating: 3.5 out of 5 stars3.5/5 (31)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4.5 out of 5 stars4.5/5 (4)
- Permaculture for the Rest of Us: Abundant Living on Less than an AcreFrom EverandPermaculture for the Rest of Us: Abundant Living on Less than an AcreRating: 4.5 out of 5 stars4.5/5 (33)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseFrom EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseRating: 3.5 out of 5 stars3.5/5 (12)
- The Path Between the Seas: The Creation of the Panama Canal, 1870-1914From EverandThe Path Between the Seas: The Creation of the Panama Canal, 1870-1914Rating: 4.5 out of 5 stars4.5/5 (124)