You might also like
- Amateur Radio Electronics on Your MobileFrom EverandAmateur Radio Electronics on Your MobileRating: 5 out of 5 stars5/5 (1)
- X-Ray Physics Dtu 08Document23 pagesX-Ray Physics Dtu 08Daniel TelloNo ratings yet
- EXS Series Product Specification.20180405.01Document1 pageEXS Series Product Specification.20180405.01Alex Araujo AlvaradoNo ratings yet
- Grp-4 Exprt8 Lab-ReportDocument32 pagesGrp-4 Exprt8 Lab-ReportTango FoxtrotNo ratings yet
- Tr300a 1Document2 pagesTr300a 1Akram AlwahibiNo ratings yet
- Catalogue-200mA X-Ray MachineDocument1 pageCatalogue-200mA X-Ray Machineshoaib tariqNo ratings yet
- 7.X Ray Manuel BookDocument17 pages7.X Ray Manuel BookJNJ channelNo ratings yet
- SIG Pulse Sparker&Boomer Energy SourcesDocument2 pagesSIG Pulse Sparker&Boomer Energy SourcesAgung Jati PramonoNo ratings yet
- Dynatel 965DSP: Subscriber Loop AnalyzerDocument6 pagesDynatel 965DSP: Subscriber Loop AnalyzerCarlos NothingNo ratings yet
- Led Diode DiodeDocument29 pagesLed Diode DiodelouieNo ratings yet
- SID NUMBER: 0926018 Module Code: Ed 130010SDocument38 pagesSID NUMBER: 0926018 Module Code: Ed 130010Ssamluvhouse05No ratings yet
- GEM-2-UAV EM Detection of Buried Pipeline From A Small UAS PlatformDocument6 pagesGEM-2-UAV EM Detection of Buried Pipeline From A Small UAS PlatformSurya Teja SarmaNo ratings yet
- 80 10m Doublet Antenna g3rwf 11Document8 pages80 10m Doublet Antenna g3rwf 11Esdras FilhoNo ratings yet
- Topic 4 - 231117 - 073731Document56 pagesTopic 4 - 231117 - 073731Àjáý ŘâãmNo ratings yet
- PhysicsDocument2 pagesPhysicsGela EcalNo ratings yet
- 5th Apr S2 - PhysicsDocument30 pages5th Apr S2 - Physicssamsung.galaxy.tab.345cNo ratings yet
- Modelos Side Sonar ScanDocument1 pageModelos Side Sonar ScanMarlon TorresNo ratings yet
- Is63 Design Considerations Power Supplies High Altitude ApplicationsDocument26 pagesIs63 Design Considerations Power Supplies High Altitude ApplicationsRama CFHNo ratings yet
- Em2040 Product SpecificationDocument2 pagesEm2040 Product Specificationpzn98zv94vNo ratings yet
- Important TablesDocument3 pagesImportant Tablesalok2007_bunty1130100% (2)
- RF BasicDocument79 pagesRF Basicrebin1988No ratings yet
- EE301-Fall 2015: Laboratory #5: BJT AMPLIFIERDocument3 pagesEE301-Fall 2015: Laboratory #5: BJT AMPLIFIEROrhunNo ratings yet
- 7.5 Summary: Section 7.6 Practice Set 209Document3 pages7.5 Summary: Section 7.6 Practice Set 209HUY NGUYEN QUANGNo ratings yet
- Insulation Resistance (IR) Values - IndexDocument8 pagesInsulation Resistance (IR) Values - IndexAbdullah Al AsikNo ratings yet
- TITLE: Corona Effect: EhvacDocument32 pagesTITLE: Corona Effect: EhvacReshi AdilNo ratings yet
- IR Value For Electrical Cable and WiringDocument9 pagesIR Value For Electrical Cable and WiringSyamraj JayarajanNo ratings yet
- RCA WV-38A Rev. 03-71Document20 pagesRCA WV-38A Rev. 03-71amndsnaNo ratings yet
- Chheve eDocument104 pagesChheve eteteasailoNo ratings yet
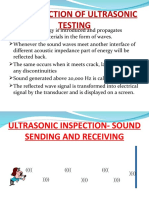
- Introduction of Ultrasonic TestingDocument70 pagesIntroduction of Ultrasonic TestingMAXX ENGINEERS100% (1)
- Acquisition Parameters: Non-Exclusive 2D SurveyDocument2 pagesAcquisition Parameters: Non-Exclusive 2D Surveyprouserdesigner77No ratings yet
- Dynatel 965DSPDocument6 pagesDynatel 965DSPCatalin PancescuNo ratings yet
- U1270 Series Handheld Digital MultimetersDocument19 pagesU1270 Series Handheld Digital MultimetersAlan WeissNo ratings yet
- LPWAN Review PDFDocument52 pagesLPWAN Review PDFEfrain TitoNo ratings yet
- 50,000-Count TRMS Digital Multimeter: For Use in Hazardous and Explosive AtmospheresDocument2 pages50,000-Count TRMS Digital Multimeter: For Use in Hazardous and Explosive Atmospheresrosvm rosvmNo ratings yet
- Flexible Rogowski CoilDocument4 pagesFlexible Rogowski CoilVinicius HudsonNo ratings yet
- Haefely LL Mafs 151127 SpecDocument2 pagesHaefely LL Mafs 151127 SpecL EnriquezNo ratings yet
- 100 Series EMC Probes: DescriptionDocument4 pages100 Series EMC Probes: DescriptionSumitta KonglaithongNo ratings yet
- Depth of InvestigationDocument8 pagesDepth of InvestigationpokolokitoNo ratings yet
- Progress in Electromagnetics Research M, Vol. 28, 129-143, 2013Document15 pagesProgress in Electromagnetics Research M, Vol. 28, 129-143, 2013HaoTran1996No ratings yet
- Resistiivty Imaging Text PDFDocument6 pagesResistiivty Imaging Text PDFSayed Jamaluddin HematNo ratings yet
- Ampacity and Sheath Bonding: John H. Cooper Power Delivery Consultants, IncDocument22 pagesAmpacity and Sheath Bonding: John H. Cooper Power Delivery Consultants, Incerson1981No ratings yet
- Fixed X-Ray HFDocument2 pagesFixed X-Ray HFJinesh SanghviNo ratings yet
- EEE0201 Prelab Week 8Document3 pagesEEE0201 Prelab Week 8Nurullah MertelNo ratings yet
- Dual Laterolog: 2 " Product LineDocument1 pageDual Laterolog: 2 " Product LineAbyanNo ratings yet
- Apache 5: Advanced Hydrographic DroneDocument4 pagesApache 5: Advanced Hydrographic DroneFrancisco PreciadoNo ratings yet
- SC1250MV Den102320wDocument4 pagesSC1250MV Den102320wAlexander ZulqarnainNo ratings yet
- Electromagnetic Wave Propagation: 1000. Source of Radio WavesDocument12 pagesElectromagnetic Wave Propagation: 1000. Source of Radio WavesfcoespinosaNo ratings yet
- 7 BCD 1 B 28Document12 pages7 BCD 1 B 28pedro perezNo ratings yet
- RF Calculator For Microsoft Excel Spreadsheet Program: Enter EnterDocument2 pagesRF Calculator For Microsoft Excel Spreadsheet Program: Enter EnterVivek Reddy DevagudiNo ratings yet
- Measurement of Insulation Resistance (IR) - Part 2 PDFDocument17 pagesMeasurement of Insulation Resistance (IR) - Part 2 PDFvaratharajan g rNo ratings yet
- Ophir PD and PEDocument12 pagesOphir PD and PEenticoNo ratings yet
- Principles of Communications Lecture FINALDocument243 pagesPrinciples of Communications Lecture FINALLorenz Ardiente67% (3)
- TDK-Chambers Absorbers System Catalog E9f1Document16 pagesTDK-Chambers Absorbers System Catalog E9f1MOHSENNo ratings yet
- Radiography X-Ray MachineDocument3 pagesRadiography X-Ray MachineMohamed ZinaNo ratings yet
- SFX8 DSDocument3 pagesSFX8 DSKapil MishraNo ratings yet
- Question 5Document7 pagesQuestion 5nkugwa6brianNo ratings yet
- Assignment 4 - BTECH 10687 21Document13 pagesAssignment 4 - BTECH 10687 21gvjbhknlkmNo ratings yet
- Ecotrade Group - Toyota 2Document1 pageEcotrade Group - Toyota 2Ebrahim JafariNo ratings yet
- Stockholm Conference - 15. Plenary Session II - Dear GottehrerDocument16 pagesStockholm Conference - 15. Plenary Session II - Dear GottehrerEbrahim JafariNo ratings yet
- Afghanite ProfileDocument27 pagesAfghanite ProfileEbrahim JafariNo ratings yet
- Ecotrade Group - Toyota 1Document1 pageEcotrade Group - Toyota 1Ebrahim JafariNo ratings yet
- Afghanite USACE CertificateDocument8 pagesAfghanite USACE CertificateEbrahim JafariNo ratings yet
- Meva ProfileDocument8 pagesMeva ProfileEbrahim JafariNo ratings yet
- ALS Geochemistry Fee Schedule USD PDFDocument52 pagesALS Geochemistry Fee Schedule USD PDFEbrahim JafariNo ratings yet
- AIMS International: With The Details and Your Interests Will Be Matched With Open RFP's in OurDocument3 pagesAIMS International: With The Details and Your Interests Will Be Matched With Open RFP's in OurEbrahim JafariNo ratings yet
- Minerals Law VEnglishDocument56 pagesMinerals Law VEnglishEbrahim JafariNo ratings yet
- MR 101 - Conflict-Sensitive Approaches To Value Chain DevelopmentDocument30 pagesMR 101 - Conflict-Sensitive Approaches To Value Chain DevelopmentJason Wolfe100% (2)
- Capacity Building of Engineers ProjectDocument4 pagesCapacity Building of Engineers ProjectEbrahim JafariNo ratings yet
- 1-JV Declaration FormDocument1 page1-JV Declaration FormEbrahim JafariNo ratings yet
- Astm D1196Document2 pagesAstm D1196David Sta Rosa100% (1)
- Concret Mix Design (M10 To M100)Document65 pagesConcret Mix Design (M10 To M100)Rajesh Kollipara93% (14)
- Slide TutorialManualDocument207 pagesSlide TutorialManualrlprNo ratings yet
- UTM ConversionDocument14 pagesUTM ConversionlsatchithananthanNo ratings yet
- GT 1200 en DM Printc (1010.08)Document2 pagesGT 1200 en DM Printc (1010.08)monitex_twNo ratings yet
- 24.71.00007 ATU X CrossesDocument14 pages24.71.00007 ATU X CrossesTitoNo ratings yet
- BNP c3040 (Eng) eDocument280 pagesBNP c3040 (Eng) eVladNo ratings yet
- Release Note For IPASOLINK 08 May 2014Document2 pagesRelease Note For IPASOLINK 08 May 2014Haytham Abdel-hadyNo ratings yet
- Digital FM ReceiverDocument16 pagesDigital FM Receiverapi-27099960100% (1)
- Manual Te 805 EnuDocument11 pagesManual Te 805 EnuMutu Daniel100% (2)
- Ieee Guide For Designing A Time Synchronization System For Power PDFDocument118 pagesIeee Guide For Designing A Time Synchronization System For Power PDFTAUSTAT JVSNo ratings yet
- Logic Circuit & Switching Theory Pre - Final Quiz 1Document14 pagesLogic Circuit & Switching Theory Pre - Final Quiz 1Russel Mendoza100% (1)
- Simulation of Passive Magnetic Bearing Using COMSOL MultiphysicsDocument7 pagesSimulation of Passive Magnetic Bearing Using COMSOL Multiphysicsxiaoqi dengNo ratings yet
- Novatek NT96650 PDFDocument35 pagesNovatek NT96650 PDFRenatoNo ratings yet
- Two Port NetworkDocument7 pagesTwo Port NetworkAzim KhanNo ratings yet
- FSP Dagger PRO User ManualDocument47 pagesFSP Dagger PRO User ManualHarith FitryNo ratings yet
- LM 5023Document38 pagesLM 5023Kartik hegdeNo ratings yet
- Electrical Installation Booklet Shipyard Standards: Marine Institute of Memorial University of NewfoundlandDocument81 pagesElectrical Installation Booklet Shipyard Standards: Marine Institute of Memorial University of NewfoundlandHoangNo ratings yet
- GARRET PD 6500i User Manual ZONE 5-6 (ZONE 5 150+0%) : 3.5.20 RELAY Nio) Nic)Document8 pagesGARRET PD 6500i User Manual ZONE 5-6 (ZONE 5 150+0%) : 3.5.20 RELAY Nio) Nic)Felipe MejiasNo ratings yet
- LSQ5 Man-0964 V3.1.0 enDocument48 pagesLSQ5 Man-0964 V3.1.0 enDiego Mondragon100% (1)
- Omni Lifenet SpecsDocument2 pagesOmni Lifenet SpecsAngel JuarezNo ratings yet
- Sample SAT Procedure (Only For Reference)Document3 pagesSample SAT Procedure (Only For Reference)Mohammed SinanNo ratings yet
- Cylon KNX GatewayDocument4 pagesCylon KNX GatewayJulián HernándezNo ratings yet
- Multilin EPM 7000P: Grid SolutionsDocument14 pagesMultilin EPM 7000P: Grid SolutionsMohammad ShreatehNo ratings yet
- Ds 11011Document3 pagesDs 11011Walther EstevezNo ratings yet
- Electrical and Electronics EngineeringDocument4 pagesElectrical and Electronics EngineeringPrithaBanerjeeNo ratings yet
- 3m qtII 5623kDocument4 pages3m qtII 5623kcerachuckNo ratings yet
- Optical Time Domain ReflectometerDocument4 pagesOptical Time Domain ReflectometerLoga NathanNo ratings yet
- Basic Metal DetectionDocument36 pagesBasic Metal DetectionAnthony ProdeniantaNo ratings yet
- MOSFET TransistorDocument17 pagesMOSFET TransistorOmer BallakNo ratings yet
- KSG-1K-SM / KSG-1.5K-SM / KSG-1.9K-SM / KSG-2K-SM KSG 1K SM/KSG 1.5K SM/KSG 1.9K SM/KSG 2K SMDocument2 pagesKSG-1K-SM / KSG-1.5K-SM / KSG-1.9K-SM / KSG-2K-SM KSG 1K SM/KSG 1.5K SM/KSG 1.9K SM/KSG 2K SMBhavik PrajapatiNo ratings yet
- 10EC64 - AP - QB - Final - TopicsDocument13 pages10EC64 - AP - QB - Final - TopicsharshithaNo ratings yet
- AE - 1.7 MOSFET Circuits - DC Biasing, AC Coupling and Small-Signal Analysis of AmplifiersDocument65 pagesAE - 1.7 MOSFET Circuits - DC Biasing, AC Coupling and Small-Signal Analysis of AmplifiersjayanthiNo ratings yet
- Simulation of Phasor Measurement Unit (PMU) in MATLAB: January 2015Document5 pagesSimulation of Phasor Measurement Unit (PMU) in MATLAB: January 2015Rajesh GangwarNo ratings yet