You might also like
- AN9003 - A Users Guide To Intrinsic Safety: Reasons For Selecting The Intrinsically Safe ConceptDocument20 pagesAN9003 - A Users Guide To Intrinsic Safety: Reasons For Selecting The Intrinsically Safe ConceptIC013 Rakshit JethwaNo ratings yet
- A Users Guide To Intrinsic Safety AN9003-9Document20 pagesA Users Guide To Intrinsic Safety AN9003-9a_m_shihaNo ratings yet
- An Introduction To Intrinsic Safety: ControlsDocument2 pagesAn Introduction To Intrinsic Safety: ControlsAquos78No ratings yet
- Cec336-Avionics Systems Question BankDocument14 pagesCec336-Avionics Systems Question BankManikandan NNo ratings yet
- Intrinsic Safety Barriers IsolatorsDocument14 pagesIntrinsic Safety Barriers IsolatorsDijith Jhansi100% (2)
- Common Criteria and IEC 62443 Certifications in CertMILS INDINDocument6 pagesCommon Criteria and IEC 62443 Certifications in CertMILS INDINCom DigfulNo ratings yet
- SAFA Presentation-IEC61511 Overview-A KneiselDocument40 pagesSAFA Presentation-IEC61511 Overview-A KneiselRiksa Wisudya Achmadsyah SugandaNo ratings yet
- Safety of Machinery: Notes On The Application of Standards EN 62061 and EN ISO 13849-1Document19 pagesSafety of Machinery: Notes On The Application of Standards EN 62061 and EN ISO 13849-1xoxejo4927No ratings yet
- Cybersecurity Based On IEC 62351 and IEC 62443 For IEC 61850 SystemsDocument7 pagesCybersecurity Based On IEC 62351 and IEC 62443 For IEC 61850 SystemshvananthNo ratings yet
- Reasons For Selecting The Intrinsically Safe Concept: AN9003 - A Users Guide To Intrinsic SafetyDocument20 pagesReasons For Selecting The Intrinsically Safe Concept: AN9003 - A Users Guide To Intrinsic SafetyWorachai SudjaiNo ratings yet
- 2.seguridad Intrinseca PDFDocument104 pages2.seguridad Intrinseca PDFerstendrainNo ratings yet
- Series Exam II MCN 401 Set ADocument1 pageSeries Exam II MCN 401 Set AJemsheerNo ratings yet
- (Mahatir) Trend of International Safety StandardsDocument5 pages(Mahatir) Trend of International Safety StandardsAndiHilmySyahirNo ratings yet
- AN9003 - A Users Guide To Intrinsic SafetyDocument20 pagesAN9003 - A Users Guide To Intrinsic SafetyLucas MendonçaNo ratings yet
- Main IECDocument9 pagesMain IECsunilNo ratings yet
- Cooper - Intrinsic Safety GuideDocument20 pagesCooper - Intrinsic Safety Guidetkdrt2166100% (2)
- INTERNET SECURITY - CI30109 - Set 1Document3 pagesINTERNET SECURITY - CI30109 - Set 1Alone WalkerNo ratings yet
- AN9003Document25 pagesAN9003Long Pham HoangNo ratings yet
- Be Winter 2022Document2 pagesBe Winter 2022Hiren PachaniNo ratings yet
- Pina Questions Topic 3.Document2 pagesPina Questions Topic 3.luhkhathini60No ratings yet
- X86507 (CC5003)Document2 pagesX86507 (CC5003)ESWARANNo ratings yet
- Adobe Scan Apr 27, 2023 PDFDocument3 pagesAdobe Scan Apr 27, 2023 PDFRethinapriya SNo ratings yet
- Part - A 10x2 20 MarksDocument1 pagePart - A 10x2 20 MarksMani KandanNo ratings yet
- How Safe Is My SystemDocument6 pagesHow Safe Is My SystemwassiiqbalNo ratings yet
- An Overview of Industrial Alarm Systems: Main Causes For Alarm Overloading, Research Status, and Open ProblemsDocument17 pagesAn Overview of Industrial Alarm Systems: Main Causes For Alarm Overloading, Research Status, and Open Problemsjluis98No ratings yet
- Iee 07, 18Document2 pagesIee 07, 18mkk398423No ratings yet
- Fast Track Course - 13CE915 Construction Safety PracticesDocument2 pagesFast Track Course - 13CE915 Construction Safety Practicesrameshbabu_1979No ratings yet
- Chapter 7: Electrical, Control & Instrumentation Aspects of Safety Case AssessmentDocument12 pagesChapter 7: Electrical, Control & Instrumentation Aspects of Safety Case AssessmentLesley LiuNo ratings yet
- New Challenges For Future Avionic ArchitecturesDocument11 pagesNew Challenges For Future Avionic ArchitecturesFernando Gonzalez GonzalezNo ratings yet
- A Users Guide To Intrinsic Safety C13571 MTLDocument20 pagesA Users Guide To Intrinsic Safety C13571 MTLgrzegorz_1973No ratings yet
- An5698 Adapting The Xcubestl Functional Safety Package For stm32 Iec 61508 Compliant To Other Safety Standards StmicroelectronicsDocument9 pagesAn5698 Adapting The Xcubestl Functional Safety Package For stm32 Iec 61508 Compliant To Other Safety Standards StmicroelectronicsDoni RandanuNo ratings yet
- 09.operational ManualDocument34 pages09.operational ManualMark Allen DejesaNo ratings yet
- ESQM Question PapersDocument10 pagesESQM Question PaperssaraswatthiNo ratings yet
- DucDocument228 pagesDucAbdi DoNo ratings yet
- Isp12020 1347889700Document11 pagesIsp12020 1347889700Karina BondarchukNo ratings yet
- Chapter 5 Design Guidelines Section 5.5 Electrical Subsection 5.5.3 Instrumentation and ControlsDocument1 pageChapter 5 Design Guidelines Section 5.5 Electrical Subsection 5.5.3 Instrumentation and ControlskapsarcNo ratings yet
- AWSNDocument1 pageAWSNHari Hara SudhanNo ratings yet
- The Long Awaited IEC 61511 Edition 2 and What It Means For The Process IndustryDocument10 pagesThe Long Awaited IEC 61511 Edition 2 and What It Means For The Process IndustryWalid IbrahimNo ratings yet
- Safety Reliability Analyses of GA Aircraft in Design and Certification Stage in Czech RepublicDocument11 pagesSafety Reliability Analyses of GA Aircraft in Design and Certification Stage in Czech RepublicKarthik KarunanidhiNo ratings yet
- Safety Manual: Eagle Quantum Premier SIL 2 Rated Fire & Gas SystemDocument28 pagesSafety Manual: Eagle Quantum Premier SIL 2 Rated Fire & Gas Systemusamakhan205No ratings yet
- Kinetix 5500 CIP Safety - Rev1.00Document23 pagesKinetix 5500 CIP Safety - Rev1.00RaphaelDornelles1992No ratings yet
- EQP Safety ManualDocument29 pagesEQP Safety ManuallucasNo ratings yet
- Non Electrical Equipment in Hazardous Areas Issue6 PDFDocument3 pagesNon Electrical Equipment in Hazardous Areas Issue6 PDFVipin SomasekharanNo ratings yet
- ASSE Engineering ArtcileDocument9 pagesASSE Engineering ArtcileErdinc SenmanNo ratings yet
- AIR Technology A Step Towards ARINC 653 in SpaceDocument7 pagesAIR Technology A Step Towards ARINC 653 in SpaceOmar SelkimNo ratings yet
- 60a11 ReadingDocument19 pages60a11 Readingishu vohraNo ratings yet
- IEEE - Transfer Time Measurement For Protection Relay Applications With The IEC 61850 StandardDocument6 pagesIEEE - Transfer Time Measurement For Protection Relay Applications With The IEC 61850 Standardrameshk82No ratings yet
- Safety PLCDocument11 pagesSafety PLCARUNKUMAR MNo ratings yet
- IP - Ingress Protection RatingsDocument5 pagesIP - Ingress Protection Ratingsbaguspermana7No ratings yet
- Asi QP Iat3 2022Document1 pageAsi QP Iat3 2022sudhakar2010No ratings yet
- Transfer Time Measurement For Protection Relay Applications With The IEC 61850 StandardDocument5 pagesTransfer Time Measurement For Protection Relay Applications With The IEC 61850 StandardBobot PadilloNo ratings yet
- 2011 Goupil, P. AIRBUS State of The Art and Practices On FDI and FTC in FCSDocument16 pages2011 Goupil, P. AIRBUS State of The Art and Practices On FDI and FTC in FCScmpmarinhoNo ratings yet
- PTC 1oo2Document4 pagesPTC 1oo2pzanasiNo ratings yet
- 95-8599-11.1 (EQP Safety)Document29 pages95-8599-11.1 (EQP Safety)Cristian CushquicullmaNo ratings yet
- Pro Line II Generic Trainig CourseDocument11 pagesPro Line II Generic Trainig CourseLouie FeytNo ratings yet
- MCN401 Industrial Safety Engineering, May 2023Document2 pagesMCN401 Industrial Safety Engineering, May 2023Sujin krishnaNo ratings yet
- MCN401 Industrial Safety Engineering, May 2023Document2 pagesMCN401 Industrial Safety Engineering, May 2023AYISHA SAHLANo ratings yet
- SAFEC Report N. SMT4-CT98-2255 - 2000Document60 pagesSAFEC Report N. SMT4-CT98-2255 - 2000slumpNo ratings yet
- ETL 1110-3-498 CBR - Shelters PDFDocument39 pagesETL 1110-3-498 CBR - Shelters PDFChris EfstathiouNo ratings yet
- BCS6L3-Programming in Java LabDocument27 pagesBCS6L3-Programming in Java Labkrushnasamy subramaniyanNo ratings yet
- Final - One Page - 2021Document3 pagesFinal - One Page - 2021krushnasamy subramaniyanNo ratings yet
- AAT CONTROL21to30 22 23Document3 pagesAAT CONTROL21to30 22 23krushnasamy subramaniyanNo ratings yet
- Minor Regulations 2021Document11 pagesMinor Regulations 2021krushnasamy subramaniyanNo ratings yet
- 19EI5DCLCS - Lect 1-Introduction To Control SystemDocument86 pages19EI5DCLCS - Lect 1-Introduction To Control Systemkrushnasamy subramaniyanNo ratings yet
- 19EI5DCLCS - Lect 2 - Tutorial - TF of Electrical NetworksDocument17 pages19EI5DCLCS - Lect 2 - Tutorial - TF of Electrical Networkskrushnasamy subramaniyanNo ratings yet
- 2021 - Syllabus III-VIII - LICDocument177 pages2021 - Syllabus III-VIII - LICkrushnasamy subramaniyanNo ratings yet
- AAT CONTROL - SS - 21to30 22 23Document6 pagesAAT CONTROL - SS - 21to30 22 23krushnasamy subramaniyanNo ratings yet
- AAT CONTROL11to20 22 23Document2 pagesAAT CONTROL11to20 22 23krushnasamy subramaniyanNo ratings yet
- 19EI5DCLCS - Lec 3 - TF of Mechanical SystemsDocument66 pages19EI5DCLCS - Lec 3 - TF of Mechanical Systemskrushnasamy subramaniyanNo ratings yet
- AAT-CONTROL41to46 SS 22-23Document3 pagesAAT-CONTROL41to46 SS 22-23krushnasamy subramaniyanNo ratings yet
- USN Dayananda Sagar College of Engineering Department of Electronics & Instrumentation Engineering Continuous Internal Evaluation - IiiDocument2 pagesUSN Dayananda Sagar College of Engineering Department of Electronics & Instrumentation Engineering Continuous Internal Evaluation - Iiikrushnasamy subramaniyanNo ratings yet
- Week MaterialDocument15 pagesWeek Materialkrushnasamy subramaniyanNo ratings yet
- AAT CONTROL31to40 22 23Document2 pagesAAT CONTROL31to40 22 23krushnasamy subramaniyanNo ratings yet
- AAT-CONTROL31to40 SS 22-23Document4 pagesAAT-CONTROL31to40 SS 22-23krushnasamy subramaniyanNo ratings yet
- AAT CONTROL1to10 22 23Document2 pagesAAT CONTROL1to10 22 23krushnasamy subramaniyanNo ratings yet
- AAT SS CONTROL11to20-22-23Document5 pagesAAT SS CONTROL11to20-22-23krushnasamy subramaniyanNo ratings yet
- Answer Key INT2Document10 pagesAnswer Key INT2krushnasamy subramaniyanNo ratings yet
- Cie2 Acs 21 22Document3 pagesCie2 Acs 21 22krushnasamy subramaniyanNo ratings yet
- AAT SS CONTROL1to10-22-23Document8 pagesAAT SS CONTROL1to10-22-23krushnasamy subramaniyanNo ratings yet
- Dayananda Sagar College of Engineering: Department of Electronics & Instrumentation Engineering (Accredited by NBA)Document5 pagesDayananda Sagar College of Engineering: Department of Electronics & Instrumentation Engineering (Accredited by NBA)krushnasamy subramaniyanNo ratings yet
- ( ) C) Laplace Inverse of ( (SI-A) : USN Dayananda Sagar College of EngineeringDocument2 pages( ) C) Laplace Inverse of ( (SI-A) : USN Dayananda Sagar College of Engineeringkrushnasamy subramaniyanNo ratings yet
- Department of Electronics and Instrumentation Internal Assessment Test - IIIDocument2 pagesDepartment of Electronics and Instrumentation Internal Assessment Test - IIIkrushnasamy subramaniyanNo ratings yet
- USN Dayananda Sagar College of Engineering: (An Autonomous Institute Affiliated To VTU, Belagavi)Document2 pagesUSN Dayananda Sagar College of Engineering: (An Autonomous Institute Affiliated To VTU, Belagavi)krushnasamy subramaniyanNo ratings yet
- USN Dayananda Sagar College of Engineering: Hot Wire AnemometerDocument2 pagesUSN Dayananda Sagar College of Engineering: Hot Wire Anemometerkrushnasamy subramaniyanNo ratings yet
- Department of Electronics and Instrumentation Internal Assessment Test - IDocument2 pagesDepartment of Electronics and Instrumentation Internal Assessment Test - Ikrushnasamy subramaniyanNo ratings yet
- Department of Electronics & Instrumentation Engineering Internal Assessment Test - IDocument2 pagesDepartment of Electronics & Instrumentation Engineering Internal Assessment Test - Ikrushnasamy subramaniyanNo ratings yet
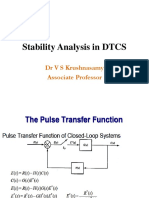
- Stability Analysis in DTCS: DR V S Krushnasamy Associate ProfessorDocument56 pagesStability Analysis in DTCS: DR V S Krushnasamy Associate Professorkrushnasamy subramaniyanNo ratings yet
- Control System and Simulation Lab (Eil77) For Vii Semester B.E Labaratory ManualDocument18 pagesControl System and Simulation Lab (Eil77) For Vii Semester B.E Labaratory Manualkrushnasamy subramaniyanNo ratings yet
- Safety Instrumentation Module - 5 Operation, Maintenance, Testing, Reporting and Management of PSMPDocument104 pagesSafety Instrumentation Module - 5 Operation, Maintenance, Testing, Reporting and Management of PSMPkrushnasamy subramaniyan100% (1)