You might also like
- Legal Drafting Assignment 1 - Memorandum - Toy Squared - Peta Gaye Arthurs - Norman Manley Law School 2021/2022 - ScribdDocument6 pagesLegal Drafting Assignment 1 - Memorandum - Toy Squared - Peta Gaye Arthurs - Norman Manley Law School 2021/2022 - ScribdGetaNo ratings yet
- 2019 Sitaca - v. - Palomares - Jr.20210424 12 rsvs2dDocument10 pages2019 Sitaca - v. - Palomares - Jr.20210424 12 rsvs2dchan.aNo ratings yet
- Rr411005 Digital Control SystemsDocument8 pagesRr411005 Digital Control SystemsSrinivasa Rao GNo ratings yet
- Prestressed Transfer Plate Design and ConstructionDocument16 pagesPrestressed Transfer Plate Design and Constructiona96lhf0% (1)
- 5ec2ea4d-d369-4454-96c6-8dd4705af487Document3 pages5ec2ea4d-d369-4454-96c6-8dd4705af487Apple servicesNo ratings yet
- Wheel Loader 937H: Technical SpecificationDocument3 pagesWheel Loader 937H: Technical SpecificationMuhamad AdamNo ratings yet
- Modelling of Electrical Transformers in Dynamic RegimesDocument8 pagesModelling of Electrical Transformers in Dynamic RegimesFatmir JashariNo ratings yet
- Dvago Brand PlanDocument46 pagesDvago Brand PlanAmeer hamzaaNo ratings yet
- Lecture 11 DecantersDocument10 pagesLecture 11 DecantersfebrianNo ratings yet
- USN Dayananda Sagar College of Engineering: (An Autonomous Institute Affiliated To VTU, Belagavi)Document2 pagesUSN Dayananda Sagar College of Engineering: (An Autonomous Institute Affiliated To VTU, Belagavi)krushnasamy subramaniyanNo ratings yet
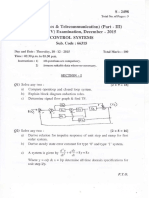
- Control Systems Question Paper 2021 Calcutta University BTech EEDocument3 pagesControl Systems Question Paper 2021 Calcutta University BTech EEAkash RoyNo ratings yet
- Assignment 1 MCTE 3313 Sem 1 2018 2019Document3 pagesAssignment 1 MCTE 3313 Sem 1 2018 2019Nurmi Elisya RosliNo ratings yet
- USN Dayananda Sagar College of Engineering: (An Autonomous Institute Affiliated To VTU, Belagavi)Document3 pagesUSN Dayananda Sagar College of Engineering: (An Autonomous Institute Affiliated To VTU, Belagavi)Krushnasamy SuramaniyanNo ratings yet
- Mid-Sem II, April 2014 EE-1163, Control System: K (Ts+1) ) 2 (1 - + R (S) C (S)Document1 pageMid-Sem II, April 2014 EE-1163, Control System: K (Ts+1) ) 2 (1 - + R (S) C (S)S JainNo ratings yet
- R7411008-Digital Control SystemsDocument4 pagesR7411008-Digital Control SystemssivabharathamurthyNo ratings yet
- Mech3418 Ca 2016Document4 pagesMech3418 Ca 2016Barry PoonNo ratings yet
- Final Exam - SampleDocument4 pagesFinal Exam - SampleAhmed MashhoorNo ratings yet
- Sheet State SpaceDocument7 pagesSheet State SpaceMahmoud A. AboulhasanNo ratings yet
- Cie2 Acs 21 22Document3 pagesCie2 Acs 21 22krushnasamy subramaniyanNo ratings yet
- EEF467 Tutorial Sheet 2Document4 pagesEEF467 Tutorial Sheet 2NK-NGAMNo ratings yet
- HW1Document3 pagesHW1Anshu Singh0% (1)
- S and S Examination PaperDocument3 pagesS and S Examination Paperzeeshanahmad12030No ratings yet
- Question Bank Mathematical MoellingDocument6 pagesQuestion Bank Mathematical Moellingshama JNo ratings yet
- EE 312 Lecture 1Document12 pagesEE 312 Lecture 1دكتور كونوهاNo ratings yet
- rr322204 Digital and Optimal Control SystemsDocument8 pagesrr322204 Digital and Optimal Control SystemsSRINIVASA RAO GANTANo ratings yet
- Digital Control Systems May 2007 Question PaperDocument8 pagesDigital Control Systems May 2007 Question Paperelimelek100% (3)
- r05220205 Control SystemsDocument9 pagesr05220205 Control SystemsandhracollegesNo ratings yet
- MDPN372 PS5 Spring 2021Document2 pagesMDPN372 PS5 Spring 2021akhbar elyoum academyNo ratings yet
- 1st Term Exam-2016Document1 page1st Term Exam-2016واما بنعمة ربك فحدثNo ratings yet
- Introduction To Control Engineering WorksheetDocument2 pagesIntroduction To Control Engineering Worksheetmillion shiferawNo ratings yet
- Jntua University Previous Question Papers: Dept., of E.C.E, RCEWDocument25 pagesJntua University Previous Question Papers: Dept., of E.C.E, RCEWpala abishayNo ratings yet
- Control Systems Unitwise Important Questions Unit 1 Part ADocument10 pagesControl Systems Unitwise Important Questions Unit 1 Part AChandra shekarNo ratings yet
- R07 Set No. 2Document8 pagesR07 Set No. 2chenumallaNo ratings yet
- Rr411007 Digital Control SystemsDocument1 pageRr411007 Digital Control SystemssivabharathamurthyNo ratings yet
- Control System 1Document31 pagesControl System 1Rakibul Hasan RakibNo ratings yet
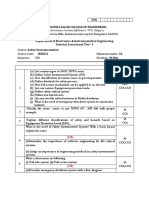
- Department of Electronics and Instrumentation Internal Assessment Test - IDocument2 pagesDepartment of Electronics and Instrumentation Internal Assessment Test - Ikrushnasamy subramaniyanNo ratings yet
- Code No: 35051Document8 pagesCode No: 35051SRINIVASA RAO GANTANo ratings yet
- Control Assignment - 1Document1 pageControl Assignment - 1Aswath PNo ratings yet
- CS Dec 15Document3 pagesCS Dec 15SAURABH BHISENo ratings yet
- 22 23Document2 pages22 23Goura Sundar TripathyNo ratings yet
- RR420201-DIGITAL-CONTROL-SYSTEMS June2007Document8 pagesRR420201-DIGITAL-CONTROL-SYSTEMS June2007singnamonivinaykumarNo ratings yet
- Mtech Ee 2 Sem Digital Control System 2013Document3 pagesMtech Ee 2 Sem Digital Control System 2013AJOY BANIKNo ratings yet
- Ee 7 Sem Control System 2 2016Document4 pagesEe 7 Sem Control System 2 2016Suryakanta PattanaikNo ratings yet
- Assignment 2Document3 pagesAssignment 2phatctNo ratings yet
- 06 ESm 43 MQDocument6 pages06 ESm 43 MQGuruprasadNo ratings yet
- Paper 3C1 Examples Sheet 8: Control Systems: David Corrigan 2011Document3 pagesPaper 3C1 Examples Sheet 8: Control Systems: David Corrigan 2011Armando MaloneNo ratings yet
- Ee304 ADocument3 pagesEe304 AAboo FarisNo ratings yet
- Control Systems and Mechatronics ExamDocument4 pagesControl Systems and Mechatronics ExamOdoch HerbertNo ratings yet
- Signals and Systems Model Exit ExamDocument12 pagesSignals and Systems Model Exit ExamZerubabel FasikaNo ratings yet
- BMS College of Engineering, Bangalore-560019: June 2016 Semester End Make Up ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: June 2016 Semester End Make Up Examinationskoushik bhatNo ratings yet
- MEC E 420 Feedback Control Dynamic SystemsDocument8 pagesMEC E 420 Feedback Control Dynamic SystemscatzzruleNo ratings yet
- EE QuesDocument7 pagesEE Quespratikchattopadhyay2No ratings yet
- R.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question BankDocument6 pagesR.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question Bankaarthir88No ratings yet
- EAC533 - LCS - Assignment I QuestionDocument2 pagesEAC533 - LCS - Assignment I Questionmeseret sisayNo ratings yet
- QuizDocument6 pagesQuizSelva SNo ratings yet
- Eee311 TermDocument38 pagesEee311 Termসামিন জাওয়াদNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological UniversityAditya JadejaNo ratings yet
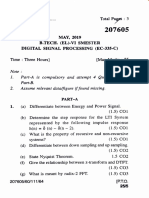
- DSP4Document3 pagesDSP420001015503 MANAWWAR HUSSAINNo ratings yet
- 2022-Dec EC-411 100Document1 page2022-Dec EC-411 100Durgesh AnandNo ratings yet
- rr420201 Digital Control SystemsDocument8 pagesrr420201 Digital Control SystemsSRINIVASA RAO GANTANo ratings yet
- Group-A (Multiple Objective Type Question) : X X X X X X X X XDocument11 pagesGroup-A (Multiple Objective Type Question) : X X X X X X X X XSoumya KhatuaNo ratings yet
- Lecture 2Document47 pagesLecture 2Houssam moussaNo ratings yet
- Control (1) Final 2019 3rd PowerDocument1 pageControl (1) Final 2019 3rd PowerMohmed Ashraf AhmedNo ratings yet
- B. Tech Control SystemsDocument2 pagesB. Tech Control SystemsAnant VermaNo ratings yet
- Tutorial 1-Chapter 1Document2 pagesTutorial 1-Chapter 1cantik cuteNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)From EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)No ratings yet
- Minor Regulations 2021Document11 pagesMinor Regulations 2021krushnasamy subramaniyanNo ratings yet
- 2021 - Syllabus III-VIII - LICDocument177 pages2021 - Syllabus III-VIII - LICkrushnasamy subramaniyanNo ratings yet
- AAT-CONTROL41to46 SS 22-23Document3 pagesAAT-CONTROL41to46 SS 22-23krushnasamy subramaniyanNo ratings yet
- 19EI5DCLCS - Lec 3 - TF of Mechanical SystemsDocument66 pages19EI5DCLCS - Lec 3 - TF of Mechanical Systemskrushnasamy subramaniyanNo ratings yet
- AAT-CONTROL31to40 SS 22-23Document4 pagesAAT-CONTROL31to40 SS 22-23krushnasamy subramaniyanNo ratings yet
- 19EI5DCLCS - Lect 2 - Tutorial - TF of Electrical NetworksDocument17 pages19EI5DCLCS - Lect 2 - Tutorial - TF of Electrical Networkskrushnasamy subramaniyanNo ratings yet
- BCS6L3-Programming in Java LabDocument27 pagesBCS6L3-Programming in Java Labkrushnasamy subramaniyanNo ratings yet
- AAT CONTROL21to30 22 23Document3 pagesAAT CONTROL21to30 22 23krushnasamy subramaniyanNo ratings yet
- 19EI5DCLCS - Lect 1-Introduction To Control SystemDocument86 pages19EI5DCLCS - Lect 1-Introduction To Control Systemkrushnasamy subramaniyanNo ratings yet
- AAT CONTROL11to20 22 23Document2 pagesAAT CONTROL11to20 22 23krushnasamy subramaniyanNo ratings yet
- AAT CONTROL31to40 22 23Document2 pagesAAT CONTROL31to40 22 23krushnasamy subramaniyanNo ratings yet
- AAT SS CONTROL1to10-22-23Document8 pagesAAT SS CONTROL1to10-22-23krushnasamy subramaniyanNo ratings yet
- AAT CONTROL - SS - 21to30 22 23Document6 pagesAAT CONTROL - SS - 21to30 22 23krushnasamy subramaniyanNo ratings yet
- AAT SS CONTROL11to20-22-23Document5 pagesAAT SS CONTROL11to20-22-23krushnasamy subramaniyanNo ratings yet
- AAT CONTROL1to10 22 23Document2 pagesAAT CONTROL1to10 22 23krushnasamy subramaniyanNo ratings yet
- Week MaterialDocument15 pagesWeek Materialkrushnasamy subramaniyanNo ratings yet
- Dayananda Sagar College of Engineering: Department of Electronics & Instrumentation Engineering (Accredited by NBA)Document5 pagesDayananda Sagar College of Engineering: Department of Electronics & Instrumentation Engineering (Accredited by NBA)krushnasamy subramaniyanNo ratings yet
- Stability Analysis in DTCS: DR V S Krushnasamy Associate ProfessorDocument56 pagesStability Analysis in DTCS: DR V S Krushnasamy Associate Professorkrushnasamy subramaniyanNo ratings yet
- Cie2 Acs 21 22Document3 pagesCie2 Acs 21 22krushnasamy subramaniyanNo ratings yet
- Answer Key INT2Document10 pagesAnswer Key INT2krushnasamy subramaniyanNo ratings yet
- USN Dayananda Sagar College of Engineering Department of Electronics & Instrumentation Engineering Continuous Internal Evaluation - IiiDocument2 pagesUSN Dayananda Sagar College of Engineering Department of Electronics & Instrumentation Engineering Continuous Internal Evaluation - Iiikrushnasamy subramaniyanNo ratings yet
- USN Dayananda Sagar College of Engineering: Hot Wire AnemometerDocument2 pagesUSN Dayananda Sagar College of Engineering: Hot Wire Anemometerkrushnasamy subramaniyanNo ratings yet
- Department of Electronics and Instrumentation Internal Assessment Test - IDocument2 pagesDepartment of Electronics and Instrumentation Internal Assessment Test - Ikrushnasamy subramaniyanNo ratings yet
- An Autonomous Institute Affiliated To VTU, BelagaviDocument1 pageAn Autonomous Institute Affiliated To VTU, Belagavikrushnasamy subramaniyanNo ratings yet
- Department of Electronics & Instrumentation Engineering Internal Assessment Test - IDocument2 pagesDepartment of Electronics & Instrumentation Engineering Internal Assessment Test - Ikrushnasamy subramaniyanNo ratings yet
- Safety Instrumentation Module - 5 Operation, Maintenance, Testing, Reporting and Management of PSMPDocument104 pagesSafety Instrumentation Module - 5 Operation, Maintenance, Testing, Reporting and Management of PSMPkrushnasamy subramaniyan100% (1)
- Department of Electronics and Instrumentation Internal Assessment Test - IIIDocument2 pagesDepartment of Electronics and Instrumentation Internal Assessment Test - IIIkrushnasamy subramaniyanNo ratings yet
- Stability Analysis in DTCS: DR V S Krushnasamy Associate ProfessorDocument58 pagesStability Analysis in DTCS: DR V S Krushnasamy Associate Professorkrushnasamy subramaniyanNo ratings yet
- Control System and Simulation Lab (Eil77) For Vii Semester B.E Labaratory ManualDocument18 pagesControl System and Simulation Lab (Eil77) For Vii Semester B.E Labaratory Manualkrushnasamy subramaniyanNo ratings yet
- DIAGRAMA-ventanas Electricas SparkevDocument3 pagesDIAGRAMA-ventanas Electricas SparkevHarvey LaresNo ratings yet
- British Columbia Drivers Handbook OnlineDocument309 pagesBritish Columbia Drivers Handbook OnlinejaneizzNo ratings yet
- TYBAF 138 Mohnish MehtaDocument10 pagesTYBAF 138 Mohnish MehtaKomal JainNo ratings yet
- Answer 2 - Answers Only For Crane Company, Swifty Company, Pharaoh Company, and Random Accounting QuestionsDocument10 pagesAnswer 2 - Answers Only For Crane Company, Swifty Company, Pharaoh Company, and Random Accounting QuestionsRheu ReyesNo ratings yet
- Sem3 MCQ HRMDocument8 pagesSem3 MCQ HRMvenkat annabhimoju50% (2)
- RA9293Document11 pagesRA9293Joseph LizadaNo ratings yet
- Uba10-11 SS 27851 Id003 ArgDocument8 pagesUba10-11 SS 27851 Id003 ArgJorge BeltranNo ratings yet
- Literature Review UnemploymentDocument2 pagesLiterature Review UnemploymentMalik MuzaffarNo ratings yet
- MemorialDocument13 pagesMemorialSakshi MalikNo ratings yet
- Car and Driver Buyer's Guide 2010Document151 pagesCar and Driver Buyer's Guide 2010killjoymsfNo ratings yet
- Magdusa vs. AlbaranDocument4 pagesMagdusa vs. AlbaranXtine CampuPotNo ratings yet
- Manual PDFDocument470 pagesManual PDFDung Vo TanNo ratings yet
- Kaigah HPP - Executive SummaryDocument27 pagesKaigah HPP - Executive SummaryAli Nawaz Khan100% (1)
- AUTOCAD INTERVIEW QUESTION - Technical DesignDocument6 pagesAUTOCAD INTERVIEW QUESTION - Technical DesignAshutosh ChauhanNo ratings yet
- Eng SS 114-151009 A3Document48 pagesEng SS 114-151009 A3Crespo JorgeNo ratings yet
- Research Paper On N Queen ProblemDocument7 pagesResearch Paper On N Queen Problemxvrdskrif100% (1)
- Labor Justice Across The AmericasDocument4 pagesLabor Justice Across The AmericasAnonymous W1vBbIE4uyNo ratings yet
- Air Compressor Room Exhaust (30000CMH)Document1 pageAir Compressor Room Exhaust (30000CMH)Kumar sssssNo ratings yet
- Stacks HWDocument3 pagesStacks HWSarah PachapureNo ratings yet
- Science, Technology, and Society: World History: Chapter OutlineDocument7 pagesScience, Technology, and Society: World History: Chapter OutlineRhea PicaNo ratings yet
- E Brochure-Fdc PDFDocument6 pagesE Brochure-Fdc PDFJahjaNo ratings yet
- Torque Follower Setup Rev 1Document7 pagesTorque Follower Setup Rev 1NelsonNo ratings yet