You might also like
- 4l60e OverhaulDocument184 pages4l60e OverhaulJR Norris100% (2)
- Split Air Conditioner Type - Service ManualDocument48 pagesSplit Air Conditioner Type - Service ManualbrodtmtNo ratings yet
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- IRC5 Programming and Operation - 2007Document102 pagesIRC5 Programming and Operation - 2007Siska Andriana Gusti100% (2)
- C Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingFrom EverandC Programming for the PIC Microcontroller: Demystify Coding with Embedded ProgrammingNo ratings yet
- Avamar Data Domain Whitepaper PDFDocument30 pagesAvamar Data Domain Whitepaper PDFSyedZulhilmiNo ratings yet
- MercruiserDocument268 pagesMercruiserJoe Pudlak100% (1)
- Pixhawk Manual Rev3 3Document12 pagesPixhawk Manual Rev3 3Galih NugrahaNo ratings yet
- PLC Training ManualDocument117 pagesPLC Training ManualrmsanchepNo ratings yet
- Startup HandbookDocument274 pagesStartup Handbookedgard_gonzález_3No ratings yet
- FCR2XX7 Service Manual CDocument632 pagesFCR2XX7 Service Manual CArshad Jummani100% (4)
- Popular Mechanics - Hobby Lathe#1Document19 pagesPopular Mechanics - Hobby Lathe#1sonofsilas100% (1)
- Spraymec 8100 VC 100075480Document12 pagesSpraymec 8100 VC 100075480Hamid CRNo ratings yet
- System Variables List R-J3iBDocument812 pagesSystem Variables List R-J3iBRodrigo Caldeira93% (15)
- FANUC's Standard Manual Handling Programming (Version 5.0)Document29 pagesFANUC's Standard Manual Handling Programming (Version 5.0)EngChengLengNo ratings yet
- AutoCAD Customization Guide 2012Document592 pagesAutoCAD Customization Guide 2012katherxNo ratings yet
- FANUC's Standard Spot Welding Programming (Version 2.0)Document24 pagesFANUC's Standard Spot Welding Programming (Version 2.0)bvladimirov85No ratings yet
- NE MotoHawk Resource Guide PDFDocument105 pagesNE MotoHawk Resource Guide PDFMarkus SenojNo ratings yet
- Roboguide (E) v04 SDocument4 pagesRoboguide (E) v04 SAzimatronics SA de CVNo ratings yet
- Eleven Rack User Guide PDFDocument148 pagesEleven Rack User Guide PDFSaddlerSamNo ratings yet
- PS BasicDocument206 pagesPS BasicRodrigo Caldeira50% (2)
- FANUC's Standard SCA Sealing Programming (Version4.0)Document20 pagesFANUC's Standard SCA Sealing Programming (Version4.0)Leinad OicaloNo ratings yet
- Ford Fanuc R30ia R30ib Nextgen E146Document146 pagesFord Fanuc R30ia R30ib Nextgen E146marialuisafloressanabriaNo ratings yet
- FTPDocument12 pagesFTPHasan MujitoNo ratings yet
- FANUC Robot Series R-30iB CONTROLLER - MantenanceDocument8 pagesFANUC Robot Series R-30iB CONTROLLER - MantenanceRicardo André Pereira100% (1)
- RoboDK Universal RobotsDocument13 pagesRoboDK Universal RobotsjenorNo ratings yet
- FANUC ReportDocument10 pagesFANUC ReportRohitNo ratings yet
- CCRW - Robotics TrainingDocument14 pagesCCRW - Robotics TrainingRodrigo CaldeiraNo ratings yet
- HCI Cluster Deployment - Kickoff SlidesDocument27 pagesHCI Cluster Deployment - Kickoff SlidesAyoub Houbban (Square)No ratings yet
- Ford FANUC R30iA R30iB NextGen E83Document83 pagesFord FANUC R30iA R30iB NextGen E83marialuisafloressanabriaNo ratings yet
- Ford Fanuc R30ia R30ib Nextgen E161Document161 pagesFord Fanuc R30ia R30ib Nextgen E161marialuisafloressanabriaNo ratings yet
- Ford Fanuc R30ia R30ib Nextgen E286Document286 pagesFord Fanuc R30ia R30ib Nextgen E286marialuisafloressanabriaNo ratings yet
- FRC Programming Your Radio For Home UseDocument7 pagesFRC Programming Your Radio For Home UseJuan de Dios Alardín HernándezNo ratings yet
- Robodk For Fanuc RobotsDocument13 pagesRobodk For Fanuc RobotsMoundher BachirNo ratings yet
- F-Q Series Robot GOT QSGDocument17 pagesF-Q Series Robot GOT QSGJaime Roberto ArispeNo ratings yet
- 6000 Series Programmer GhideDocument268 pages6000 Series Programmer GhideJuanJValenciaCruzNo ratings yet
- RoboDK Doc EN Robots ABBDocument7 pagesRoboDK Doc EN Robots ABBSarafraj BegNo ratings yet
- TIB 1401 - New Software Version C-Series P4.8Document4 pagesTIB 1401 - New Software Version C-Series P4.8Bart JohnNo ratings yet
- FRC 2016 Running Your Benchtop Test ProgramDocument3 pagesFRC 2016 Running Your Benchtop Test ProgramJuan de Dios Alardín HernándezNo ratings yet
- DobotStudio Pro 4.1 User Guide (CR&Nova)Document224 pagesDobotStudio Pro 4.1 User Guide (CR&Nova)Trần Văn ToảnNo ratings yet
- CEM60 Firmware UpgradeDocument6 pagesCEM60 Firmware UpgradePraahas AminNo ratings yet
- EPMP Release Notes v2.4.2Document14 pagesEPMP Release Notes v2.4.2John BookNo ratings yet
- NewkerDocument161 pagesNewkerTrần ChiếnNo ratings yet
- OpenGD77 User Guide2Document33 pagesOpenGD77 User Guide2Cosmyn ZahariaNo ratings yet
- Robotics JournalDocument36 pagesRobotics JournalVaishnavis ARTNo ratings yet
- Ford FANUC R30iA R30iB NextGen E64Document64 pagesFord FANUC R30iA R30iB NextGen E64marialuisafloressanabriaNo ratings yet
- Xiaomi Mi Drone Guide - WikiRotorsDocument10 pagesXiaomi Mi Drone Guide - WikiRotorshumboldtNo ratings yet
- Working With A Higher-Level ControllerDocument4 pagesWorking With A Higher-Level ControllerRegis Lucio Fontoura Da SilvaNo ratings yet
- Datos A Tomar en CuentaDocument18 pagesDatos A Tomar en CuentaEkenlat Aeterna TenebrisNo ratings yet
- RoboDK Doc EN Robots ABBDocument7 pagesRoboDK Doc EN Robots ABBSarfaraz BegNo ratings yet
- Ford Fanuc R30ia R30ib Nextgen E180Document180 pagesFord Fanuc R30ia R30ib Nextgen E180marialuisafloressanabriaNo ratings yet
- Supermicro Utility User Guide IPMICFGDocument21 pagesSupermicro Utility User Guide IPMICFGDjaelani DhianNo ratings yet
- Testing The PIC Microcontroller 16F84ADocument4 pagesTesting The PIC Microcontroller 16F84AMatt Imri100% (2)
- Tarot 2-Axis Brushless Gimbal For Gopro User Manual V1.0: Connections InstructionsDocument8 pagesTarot 2-Axis Brushless Gimbal For Gopro User Manual V1.0: Connections InstructionsonurdasNo ratings yet
- R.Link Video-Inserter Ci-Rl2-Mmi3G-Q3 Ci-Rl2-Mmi3G-GwDocument21 pagesR.Link Video-Inserter Ci-Rl2-Mmi3G-Q3 Ci-Rl2-Mmi3G-GwHoàng Văn NghĩaNo ratings yet
- GTA04A4-4 System Manual CompleteDocument110 pagesGTA04A4-4 System Manual CompleteGibson MosesNo ratings yet
- Lab Work 4: PIC Programming in CDocument7 pagesLab Work 4: PIC Programming in CnikmatenaNo ratings yet
- FY-DoS Manual For Multi-Rotor (Firmware Above V2.20) 2013.7.15Document16 pagesFY-DoS Manual For Multi-Rotor (Firmware Above V2.20) 2013.7.15Juni AdiNo ratings yet
- RT WAP ABB Appllication Standard Rel 3Document96 pagesRT WAP ABB Appllication Standard Rel 3Guill HerNo ratings yet
- Universidad Nacional Pedro Ruiz Gallo: Facultad de Ciencias Físicas y MatemáticasDocument10 pagesUniversidad Nacional Pedro Ruiz Gallo: Facultad de Ciencias Físicas y MatemáticasFlavio SalazarNo ratings yet
- Final Project Report: LecturerDocument17 pagesFinal Project Report: LecturerIvan YohanesNo ratings yet
- NM Release Notes enDocument11 pagesNM Release Notes enSholeh Abdullah Arif BudimanNo ratings yet
- APM Quadcopter Setup: InstructablesDocument7 pagesAPM Quadcopter Setup: InstructablesgenmassaNo ratings yet
- Handout RamHino 5.1Document58 pagesHandout RamHino 5.1cuno florinNo ratings yet
- Unit 6 Lab 8 - Creating PLC ProgramsDocument8 pagesUnit 6 Lab 8 - Creating PLC ProgramsCheikh DjimeraNo ratings yet
- Manual para Diebold Opteva ATMDocument26 pagesManual para Diebold Opteva ATMJulio César Palomino PláceresNo ratings yet
- TATA BSC Up Gradation Plan: 1. IntroductionDocument13 pagesTATA BSC Up Gradation Plan: 1. IntroductionmaxiszteNo ratings yet
- CANfigurator User Guide V1.18-13102014 PDFDocument17 pagesCANfigurator User Guide V1.18-13102014 PDFedgarNo ratings yet
- S7-300 PLC in RTGDocument72 pagesS7-300 PLC in RTGmunawar munawarNo ratings yet
- KST CRArcTech Digital 32 enDocument65 pagesKST CRArcTech Digital 32 enRodrigo CaldeiraNo ratings yet
- DX100 Brake ReleaseDocument13 pagesDX100 Brake ReleaseRodrigo CaldeiraNo ratings yet
- Operator ManualDocument554 pagesOperator ManualRodrigo Caldeira100% (1)
- Collision DetectionDocument8 pagesCollision DetectionRodrigo CaldeiraNo ratings yet
- Deltapoint: Installation and Operation Manual 12 GPM Water SaverDocument30 pagesDeltapoint: Installation and Operation Manual 12 GPM Water SaverRaúl FisNo ratings yet
- Yamaha EX5 EX7 E3 Additional Performance Setup TipsDocument4 pagesYamaha EX5 EX7 E3 Additional Performance Setup TipsjboltnzNo ratings yet
- DSS7016DR Datasheet 0822Document4 pagesDSS7016DR Datasheet 0822rami6No ratings yet
- FB3 0310 en en-US - Siemens 840 Function ManualDocument1,148 pagesFB3 0310 en en-US - Siemens 840 Function ManualNicu FrunteanuNo ratings yet
- Multi ThreadingDocument22 pagesMulti ThreadingVenkata Rajesh MandavaNo ratings yet
- LPCXPresso Flash Debug TutorialDocument11 pagesLPCXPresso Flash Debug TutorialChillkroete123No ratings yet
- Backend GTLDocument16 pagesBackend GTLcarver_uaNo ratings yet
- Unit 1 - Computing ParadigmsDocument31 pagesUnit 1 - Computing ParadigmsDr.Ramesh Babu PittalaNo ratings yet
- Hung Chang DSO 2100Document14 pagesHung Chang DSO 2100Claudio BuieNo ratings yet
- Guide To Ledit For VLSIDocument11 pagesGuide To Ledit For VLSIprof_x_2010No ratings yet
- UP-D897 UP-897MD: Digital Graphic PrinterDocument4 pagesUP-D897 UP-897MD: Digital Graphic PrinterAhsan Fazal QureshiNo ratings yet
- Accessories (346 392)Document48 pagesAccessories (346 392)japa_jiujitsuNo ratings yet
- ROHILL PresentationDocument19 pagesROHILL PresentationAla'a AbdullaNo ratings yet
- DHCP Relay Agent - ConceptDocument3 pagesDHCP Relay Agent - ConceptRakesh PagareNo ratings yet
- Final Full Intro's HandoutDocument64 pagesFinal Full Intro's HandoutNega AgmasNo ratings yet
- Manual Yamaha P80S PDFDocument49 pagesManual Yamaha P80S PDFDaniel VillegasNo ratings yet
- RDM SpecDocument56 pagesRDM Specanon_103239931No ratings yet
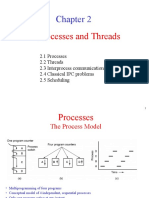
- Processes and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingDocument55 pagesProcesses and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingManasa M RNo ratings yet
- Mircom FHS340RWP Data SheetDocument4 pagesMircom FHS340RWP Data SheetJMAC SupplyNo ratings yet
- BIOS Keys For All BrandsDocument2 pagesBIOS Keys For All BrandsmugavaidineshNo ratings yet