You might also like
- Honda Accord 1987 ManualDocument242 pagesHonda Accord 1987 Manualkashral100% (1)
- PRD Prod ListingDocument626 pagesPRD Prod Listingglobalindospareparts100% (1)
- 16 MarksDocument4 pages16 MarksAnand RamanNo ratings yet
- Synchronous Generator Operating ChartDocument4 pagesSynchronous Generator Operating Chartp41005679No ratings yet
- Compressed Air Cars Seminar by UmeshDocument19 pagesCompressed Air Cars Seminar by UmeshSagar Siddamsetty100% (2)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- 3 Phase-Controlled DC Motor DrivesDocument45 pages3 Phase-Controlled DC Motor DrivesgilmartNo ratings yet
- Torque-Speed Characteristics of DC MotorsDocument58 pagesTorque-Speed Characteristics of DC Motorsm1u2raliNo ratings yet
- BLDC Motor Control Fundamentals GuideDocument18 pagesBLDC Motor Control Fundamentals GuideBala SubramanianNo ratings yet
- PCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveDocument5 pagesPCEG 403 Lab No. 1 Title: Simulation of Single Phase Half Wave Converter DC DriveJanup PokharelNo ratings yet
- Solid State Drives Short BookDocument48 pagesSolid State Drives Short BookGomathi Raja MNo ratings yet
- Solid State Controller of Drives - ExperimentDocument37 pagesSolid State Controller of Drives - ExperimentRakesh Singh LodhiNo ratings yet
- Ee 1403 Solid State DrivesDocument14 pagesEe 1403 Solid State DrivesPanchi AgrawalNo ratings yet
- Solved Numerical Problems On DC Motor DrivesDocument4 pagesSolved Numerical Problems On DC Motor DrivesypobuleshNo ratings yet
- 17ee82 - Ida - Mod 3 NotesDocument38 pages17ee82 - Ida - Mod 3 NotesManish Kumar SahaniNo ratings yet
- Drives Manual Final EeeDocument60 pagesDrives Manual Final EeenandhakumarmeNo ratings yet
- III Eee 05 Ee8501 Psa Unit 1Document37 pagesIII Eee 05 Ee8501 Psa Unit 1BALAKRISHNANNo ratings yet
- EE2401 PSOC Notes - PDF-WWW - Chennaiuniversity.net - Unlocked PDFDocument20 pagesEE2401 PSOC Notes - PDF-WWW - Chennaiuniversity.net - Unlocked PDFClement RajNo ratings yet
- Ed Lab ManualDocument27 pagesEd Lab ManualBonnieNo ratings yet
- Technical Background On Linear Induction Motors in Transportation Jun 1970Document99 pagesTechnical Background On Linear Induction Motors in Transportation Jun 1970Shantanu GaikwadNo ratings yet
- Unit Iii Induction Motor Drives: Dept. of EEEDocument17 pagesUnit Iii Induction Motor Drives: Dept. of EEEmanoj kumarNo ratings yet
- Solid State Drives - Lecture Notes, Study Material and Important Questions, AnswersDocument4 pagesSolid State Drives - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNo ratings yet
- Asynchronous Machines Tutorial Sheets (EL-208Document10 pagesAsynchronous Machines Tutorial Sheets (EL-208Kushagra BhatiaNo ratings yet
- 17ee82 - Ida - Mod 4 NotesDocument18 pages17ee82 - Ida - Mod 4 NotesManish Kumar SahaniNo ratings yet
- Electrical Machines I Lab Twisted QuestionsDocument4 pagesElectrical Machines I Lab Twisted QuestionsPranav MenonNo ratings yet
- Synchronous Machine ProblemsDocument5 pagesSynchronous Machine Problemsbhuvana71No ratings yet
- Dcmotors and Their RepresentationDocument61 pagesDcmotors and Their RepresentationSoeprapto AtmariNo ratings yet
- Injection of EMF in Rotor Circuit PDFDocument5 pagesInjection of EMF in Rotor Circuit PDFkhidirtay50% (2)
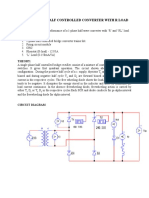
- Single Phase Half Controlled Converter With R LoadDocument3 pagesSingle Phase Half Controlled Converter With R LoadB ANIL KUMARNo ratings yet
- IDA - QuesbankDocument10 pagesIDA - QuesbankKavitha KaviNo ratings yet
- Frog Leg WindingDocument9 pagesFrog Leg WindingAbhijeet RedekarNo ratings yet
- Electrical Braking of Three Phase Induct PDFDocument4 pagesElectrical Braking of Three Phase Induct PDFFranc Lami100% (1)
- Wound-Field Synchronous Machine DrivesDocument62 pagesWound-Field Synchronous Machine DrivesKorlpate BhaskarNo ratings yet
- DMA Controller - 8237Document9 pagesDMA Controller - 8237Umesh Harihara sudanNo ratings yet
- 1ph IM No Load and Block RotorDocument5 pages1ph IM No Load and Block RotorKrushna Pisal100% (1)
- Numerical Problems Synchronous MachinesDocument3 pagesNumerical Problems Synchronous MachinestusharNo ratings yet
- Chapter 1 DC Drives Part1Document46 pagesChapter 1 DC Drives Part1Mohammad MunzirNo ratings yet
- Chapter 5: Speed-Torque Characteristics of Electric MotorsDocument46 pagesChapter 5: Speed-Torque Characteristics of Electric MotorsFrozenTuxNo ratings yet
- 27-Level Inverter for Solar PVDocument22 pages27-Level Inverter for Solar PVAnand KumarNo ratings yet
- DC Motor DrivesDocument50 pagesDC Motor DrivesHari PrasadNo ratings yet
- Chapter Twelve: DC Chopper DrivesDocument24 pagesChapter Twelve: DC Chopper Drivesfor lifeNo ratings yet
- EED370 Syllabus Switched Mode Power ConvertersDocument1 pageEED370 Syllabus Switched Mode Power Converterssidharth aggarwalNo ratings yet
- Experiment No.5-Determination of XD and XQ of Synchronous Machine by Slip TestDocument3 pagesExperiment No.5-Determination of XD and XQ of Synchronous Machine by Slip Test61EEPrabhat PalNo ratings yet
- V/F Control of Induction Motors for Variable Speed Drive ApplicationsDocument32 pagesV/F Control of Induction Motors for Variable Speed Drive ApplicationssidharthNo ratings yet
- FulltextThesis 2Document209 pagesFulltextThesis 2Kean PagnaNo ratings yet
- Lecture Notes On Permanent Magnet Brushless DC Motor Drive For Light Electric Vehicle ApplicationDocument24 pagesLecture Notes On Permanent Magnet Brushless DC Motor Drive For Light Electric Vehicle ApplicationAshish KumarNo ratings yet
- EEU453 Industrial DrivesDocument1 pageEEU453 Industrial DrivesSatish NurukurthiNo ratings yet
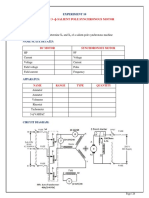
- V and Inverted V Curves of Synchronous MotorDocument7 pagesV and Inverted V Curves of Synchronous Motorkarthikeyan249No ratings yet
- Electric BrakingDocument27 pagesElectric Brakingmastanamma.YNo ratings yet
- DC-DC Converter Guide for BeginnersDocument98 pagesDC-DC Converter Guide for BeginnersHarsha Anantwar100% (1)
- Experiment 3 Economic Load DispatchDocument12 pagesExperiment 3 Economic Load DispatchMahesh KambleNo ratings yet
- Ee8004 Modern Power Converters SyllabusDocument2 pagesEe8004 Modern Power Converters SyllabussignjpcoeNo ratings yet
- CMR Institute of Technology, Bangalore: Link To Detailed SyllabusDocument6 pagesCMR Institute of Technology, Bangalore: Link To Detailed SyllabusChithra Manivelan0% (1)
- PX7203-Special Electrical Machines PDFDocument11 pagesPX7203-Special Electrical Machines PDFvaishnavisriNo ratings yet
- DC Motor Speed ControllerDocument22 pagesDC Motor Speed ControllerShafqt MbrkNo ratings yet
- Slip Test On Salient Pole MachineDocument3 pagesSlip Test On Salient Pole Machinedeepak reddyNo ratings yet
- DC Motor Braking Methods Explained in 19 StepsDocument19 pagesDC Motor Braking Methods Explained in 19 StepsDr.K.Krishna Veni ProfessorNo ratings yet
- Electric Braking Methods for MotorsDocument11 pagesElectric Braking Methods for MotorsNeeraj NagaNo ratings yet
- Guerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)Document22 pagesGuerra, John Nichol N. Bsme 3C (Ac and DC Ass.2)John Nichol GuerraNo ratings yet
- Rohini 11967264535Document9 pagesRohini 11967264535Chayan MondalNo ratings yet
- Lab 12 - Universal MotorDocument8 pagesLab 12 - Universal MotorSanjeev Kumar Jha50% (2)
- Drives SolutionsDocument4 pagesDrives SolutionsMohammad Umar RehmanNo ratings yet
- Eee 282n ProblemDocument2 pagesEee 282n ProblemMohammad Umar RehmanNo ratings yet
- Teaching Dossier: Andrew W. H. HouseDocument9 pagesTeaching Dossier: Andrew W. H. HouseMohammad Umar RehmanNo ratings yet
- EEE-282N - S&S Quiz, U-1,2 - SolutionsDocument2 pagesEEE-282N - S&S Quiz, U-1,2 - SolutionsMohammad Umar RehmanNo ratings yet
- Presentation 1Document2 pagesPresentation 1Mohammad Umar RehmanNo ratings yet
- Turning Your Dissertation Into A Publishable Journal ArticleDocument10 pagesTurning Your Dissertation Into A Publishable Journal ArticleMohammad Umar RehmanNo ratings yet
- LightLevels Outdoor+indoor PDFDocument5 pagesLightLevels Outdoor+indoor PDFMauricio Cesar Molina ArtetaNo ratings yet
- Measure resistors in series and parallelDocument3 pagesMeasure resistors in series and parallelAnonymous QvdxO5XTRNo ratings yet
- Lecture 16-17-18 Signal Flow GraphsDocument58 pagesLecture 16-17-18 Signal Flow GraphsMohammad Umar RehmanNo ratings yet
- B.tech. Electrical III SemDocument95 pagesB.tech. Electrical III SemMohammad Umar RehmanNo ratings yet
- Eec 504Document25 pagesEec 504Mohammad Umar RehmanNo ratings yet
- Solving Convolution Problems: PART I: Using The Convolution IntegralDocument4 pagesSolving Convolution Problems: PART I: Using The Convolution IntegralMayank NautiyalNo ratings yet
- NLC Synopsis 2Document4 pagesNLC Synopsis 2riddler_007No ratings yet
- Field ControlDocument1 pageField ControlMohammad Umar RehmanNo ratings yet
- ME 422 Control Systems: Steady-State Error NotesDocument4 pagesME 422 Control Systems: Steady-State Error NotesJames W MwangiNo ratings yet
- Expt 2Document8 pagesExpt 2bryarNo ratings yet
- Chapter 10Document93 pagesChapter 10Carraan Dandeettirra Caala Altakkatakka100% (1)
- 10629Document36 pages10629Mohammad Umar RehmanNo ratings yet
- Why Teach Mathematical ModellingDocument3 pagesWhy Teach Mathematical ModellingMohammad Umar RehmanNo ratings yet
- Z01 FRAN6598 07 SE All 0 PDFDocument113 pagesZ01 FRAN6598 07 SE All 0 PDFMohammad Umar RehmanNo ratings yet
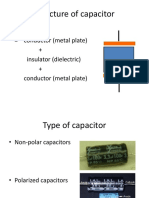
- Structure of Capacitor: - Capacitor Conductor (Metal Plate) + Insulator (Dielectric) + Conductor (Metal Plate)Document11 pagesStructure of Capacitor: - Capacitor Conductor (Metal Plate) + Insulator (Dielectric) + Conductor (Metal Plate)Mohammad Umar RehmanNo ratings yet
- 2011 - Nature - Grad - Student - Aspirations and Anxieties PDFDocument3 pages2011 - Nature - Grad - Student - Aspirations and Anxieties PDFMohammad Umar RehmanNo ratings yet
- Power Distribution IITKDocument5 pagesPower Distribution IITKMohammad Umar RehmanNo ratings yet
- Ee 6365 Electrical Engineering Laboratory Manual: (Type Text)Document59 pagesEe 6365 Electrical Engineering Laboratory Manual: (Type Text)Mohammad Umar RehmanNo ratings yet
- Iare - e Autonomous Regulations and Syllubus - 12Document293 pagesIare - e Autonomous Regulations and Syllubus - 12Mohammad Umar RehmanNo ratings yet
- 2015JEEADVP 1 SolutionsDocument35 pages2015JEEADVP 1 SolutionsRajdeepNo ratings yet
- Calculus StandardsDocument2 pagesCalculus StandardsMohammad Umar RehmanNo ratings yet
- B015Document40 pagesB015Indrojyoti MondalNo ratings yet
- Sprag CatalogDocument16 pagesSprag CatalogsaddlemanNo ratings yet
- Negative Sequence in Power SystemDocument2 pagesNegative Sequence in Power SystemMuhammad JunaidNo ratings yet
- High Ratio Axle-2025 & 20HP - NotesDocument2 pagesHigh Ratio Axle-2025 & 20HP - NotesHofmannsofHenleyNo ratings yet
- L45425en BDocument4 pagesL45425en BJerNo ratings yet
- zf4hp24 PDFDocument4 pageszf4hp24 PDFAymzNo ratings yet
- Transfer Gear FOTON - TunlandDocument25 pagesTransfer Gear FOTON - Tunlandgire_3pich2005No ratings yet
- Rotary SPOA7, SPOA9 PartsDocument4 pagesRotary SPOA7, SPOA9 PartsIvan SoteloNo ratings yet
- VF-0.4 - (15-20) - 250 Natural Gas Compressor Quotation and Selection Table - Xuzhou Huayan Gas Equipment Co.,LTDDocument5 pagesVF-0.4 - (15-20) - 250 Natural Gas Compressor Quotation and Selection Table - Xuzhou Huayan Gas Equipment Co.,LTDDeva Chandra SekharNo ratings yet
- Power Train: Procedure and Suggestions For Removal and InstallationDocument11 pagesPower Train: Procedure and Suggestions For Removal and InstallationIvaylo PetkovNo ratings yet
- Crankshaft: Engine Type OEM Ref. Main (MM) Conrod (MM) Stroke (MM) Length (MM) Cylinder RemarkDocument8 pagesCrankshaft: Engine Type OEM Ref. Main (MM) Conrod (MM) Stroke (MM) Length (MM) Cylinder RemarkRobert Gonzalez100% (1)
- XHHW-2: Standards / Testing SpecificationsDocument2 pagesXHHW-2: Standards / Testing SpecificationsJonathan Valverde RojasNo ratings yet
- General Information on 2010 Polaris ATV ModelsDocument12 pagesGeneral Information on 2010 Polaris ATV ModelsinforlexNo ratings yet
- Fenner HRC Couplings and SpidersDocument14 pagesFenner HRC Couplings and SpidersRajagopalNo ratings yet
- Engine Performance Curve: Rating: Application:MarineDocument4 pagesEngine Performance Curve: Rating: Application:Marinekman548No ratings yet
- Purchase Request Urgent: Item QTY UOM UnitDocument10 pagesPurchase Request Urgent: Item QTY UOM UnitHariyanto oknesNo ratings yet
- Innovated Engine: Heavy-Duty Forklift TrucksDocument4 pagesInnovated Engine: Heavy-Duty Forklift TrucksCristian Manuel Daza MafiolisNo ratings yet
- CBA-Series Scotch-Yoke Pneumatic ActuatorsDocument4 pagesCBA-Series Scotch-Yoke Pneumatic Actuatorsprihartono_diasNo ratings yet
- JLR Diagnosis and Testing 1Document14 pagesJLR Diagnosis and Testing 1Richard Andrianjaka LuckyNo ratings yet
- LUBI LES 40-160-2 Test CurveDocument1 pageLUBI LES 40-160-2 Test CurveRichard RajkumarNo ratings yet
- SB CatalogDocument20 pagesSB CatalogCentral HydraulicsNo ratings yet
- Pump Manuals - Op-MV600Document6 pagesPump Manuals - Op-MV600kuladeepkatragaddaNo ratings yet
- Lifting Capacity:2.93ton X 2.5mDocument3 pagesLifting Capacity:2.93ton X 2.5m이현기No ratings yet
- Designing a 100-Ton Overhead CraneDocument44 pagesDesigning a 100-Ton Overhead CraneEyob AdNo ratings yet
- TechDocument37 pagesTechmahadevbNo ratings yet
- Starting System 2Document5 pagesStarting System 2Gthulasi78No ratings yet
- 42BYGHW609 Stepper Motor Datasheet1Document3 pages42BYGHW609 Stepper Motor Datasheet1Alan_88No ratings yet
- Riyadh Ductwork Project Pressure Loss CalculationsDocument1 pageRiyadh Ductwork Project Pressure Loss CalculationsFahad NaveedNo ratings yet