You might also like
- DLP Grade 7Document5 pagesDLP Grade 7Yanyan Lapasaran Palec100% (1)
- AP2255 3D Modelling RulesDocument37 pagesAP2255 3D Modelling RulesManNo ratings yet
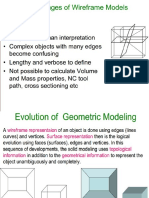
- Solid Modeling: Evolution of Geometric ModelingDocument18 pagesSolid Modeling: Evolution of Geometric ModelingVishnu SreeKumarNo ratings yet
- Manifold (Good)Document51 pagesManifold (Good)Rajesh KaluriNo ratings yet
- Solid Modeling B Rep FinalDocument68 pagesSolid Modeling B Rep Finaltimepass9580No ratings yet
- SolidmodelingDocument21 pagesSolidmodelingwatson123No ratings yet
- Cad 19Document44 pagesCad 19Priyakrishnan SenthilNo ratings yet
- Lecture 13 Solid ModellingDocument27 pagesLecture 13 Solid ModellingPranav MadaanNo ratings yet
- File Area Primitives: Surface TessellationDocument24 pagesFile Area Primitives: Surface TessellationNivedita kNo ratings yet
- CG Module 2 - Part1Document67 pagesCG Module 2 - Part1Nithin SSNo ratings yet
- Cad Cam R20 Unit 2Document71 pagesCad Cam R20 Unit 2ERRI TEJAKUMARNo ratings yet
- Unit 2 Solid ModelingDocument26 pagesUnit 2 Solid ModelingMohammed Fakhruddin Hasan NizamiNo ratings yet
- Unit 3Document64 pagesUnit 3x055311No ratings yet
- Unit - 4Document52 pagesUnit - 4qwdfghNo ratings yet
- CAD CAM - PresentationDocument25 pagesCAD CAM - PresentationrohanNo ratings yet
- Unit 4 CADDocument45 pagesUnit 4 CADiampiyushsahuNo ratings yet
- Lecture Resume - Isoprametric ConceptDocument40 pagesLecture Resume - Isoprametric ConceptlenykingNo ratings yet
- Cad and Analysis: Surface Modelling (Mod3)Document11 pagesCad and Analysis: Surface Modelling (Mod3)sachin100% (1)
- Presentation On Solid ModellingDocument31 pagesPresentation On Solid ModellingdivyanshuNo ratings yet
- Methods of Structural GeologyDocument10 pagesMethods of Structural GeologyFrancisco Alfaro100% (1)
- Analisa Spasial Data Vektor Sederhana: Pertemuan 7Document60 pagesAnalisa Spasial Data Vektor Sederhana: Pertemuan 7ratihokebgtNo ratings yet
- Computer Aided Design (Cad) : Unit - Ii Geometric ModelingDocument34 pagesComputer Aided Design (Cad) : Unit - Ii Geometric ModelingvemonNo ratings yet
- Unit III Solid ModellingDocument63 pagesUnit III Solid ModellingSuhasNo ratings yet
- Robotics Control L3Document105 pagesRobotics Control L3Lavesh GoyalNo ratings yet
- Solid Modeling 12Document33 pagesSolid Modeling 12SasiKumar PetchiappanNo ratings yet
- Geometric Modeling-Chapter 4Document46 pagesGeometric Modeling-Chapter 4Suraj RaviNo ratings yet
- Chapter-962 Modeling Basics: 5/2/2013 I/C: Regalla Srinivasa Prakash 1Document33 pagesChapter-962 Modeling Basics: 5/2/2013 I/C: Regalla Srinivasa Prakash 1SasiKumar PetchiappanNo ratings yet
- Grid GenerationDocument41 pagesGrid GenerationAmbrish Singh100% (1)
- CAD Notes Unit II Part 2Document11 pagesCAD Notes Unit II Part 2Mohd InayathNo ratings yet
- CG-module 5Document123 pagesCG-module 5VISHAL KOULNo ratings yet
- 05 CSG ProceduralDocument86 pages05 CSG ProceduralDavid PomaNo ratings yet
- Geometric ModelingDocument39 pagesGeometric ModelingPadmavathi Putra Lokesh100% (2)
- Module V-PPT - 2Document58 pagesModule V-PPT - 2Rajeswari RNo ratings yet
- What Is Meant by The Geometric Modelling of An Object?Document11 pagesWhat Is Meant by The Geometric Modelling of An Object?mohbNo ratings yet
- Module 2 PDFDocument66 pagesModule 2 PDFsushmitha patilNo ratings yet
- Solid Modeling 123Document33 pagesSolid Modeling 123SasiKumar PetchiappanNo ratings yet
- Modeling 526Document11 pagesModeling 526SasiKumar PetchiappanNo ratings yet
- 15-1-Parametric Solid Modeling - FundamentalsDocument51 pages15-1-Parametric Solid Modeling - FundamentalsNANDULA GOUTHAM SAINo ratings yet
- Lec09 HoughDocument48 pagesLec09 HoughrajuNo ratings yet
- 03 Pengenalan Open GLDocument37 pages03 Pengenalan Open GLGani DharunaNo ratings yet
- A Mathematical Formulation For Tool Path Generation in 5-Axis Laser Welding Process Applied On A Free Form SurfaceDocument52 pagesA Mathematical Formulation For Tool Path Generation in 5-Axis Laser Welding Process Applied On A Free Form SurfaceRahul RajNo ratings yet
- CG Module4Document16 pagesCG Module4sakritiNo ratings yet
- MC591 Manipulator Mechanism Design RequirementsDocument32 pagesMC591 Manipulator Mechanism Design Requirementsfranklin ChikuwaNo ratings yet
- Cad CamDocument34 pagesCad Camshantikiran shantikiranNo ratings yet
- Connecting Bolts Represented As Beam ElementsDocument19 pagesConnecting Bolts Represented As Beam ElementsJoshua KarthikNo ratings yet
- As. Prof. AMD: Guided By: Dr. S. A. Bhalchandra, Presented By: Uday MDocument61 pagesAs. Prof. AMD: Guided By: Dr. S. A. Bhalchandra, Presented By: Uday MAlla BeeNo ratings yet
- Robot Lab Path PlanningDocument94 pagesRobot Lab Path PlanningKevin CarvalhoNo ratings yet
- SolidsDocument70 pagesSolidskajalNo ratings yet
- 3d Model SpaceDocument9 pages3d Model SpaceAjit BvbNo ratings yet
- ProE Surfacing - Module 3Document71 pagesProE Surfacing - Module 3inthemoney8No ratings yet
- FEM3Document11 pagesFEM3Manander SInghNo ratings yet
- Spatial Data Mining: Presented By-: Rajkumar Jain M.tech (C.s.e) 1 Year (2 Sem)Document27 pagesSpatial Data Mining: Presented By-: Rajkumar Jain M.tech (C.s.e) 1 Year (2 Sem)Johnson0% (1)
- CG Mod2@AzDOCUMENTS - in PDFDocument65 pagesCG Mod2@AzDOCUMENTS - in PDFsangamesh kNo ratings yet
- Projective Geometry and TransformationsDocument37 pagesProjective Geometry and TransformationsyaswanthNo ratings yet
- Geometric ModelingDocument35 pagesGeometric ModelingThirumalaimuthukumaranMohanNo ratings yet
- Ship GeometryDocument30 pagesShip GeometrydanishNo ratings yet
- Curved SurfacesDocument14 pagesCurved SurfaceskannanvikneshNo ratings yet
- Unit 4 CGDocument52 pagesUnit 4 CGDhruti PatelNo ratings yet
- 2D Polygon Clipping-Annotated-mod 4 - 1Document17 pages2D Polygon Clipping-Annotated-mod 4 - 1Rajeswari RNo ratings yet
- Physical Design - Overall FlowDocument40 pagesPhysical Design - Overall Flowshabbir470No ratings yet
- Chapter 12 Solid Modeling Wireframe, Surface, Solid ModelingDocument11 pagesChapter 12 Solid Modeling Wireframe, Surface, Solid ModelingSasiKumar PetchiappanNo ratings yet
- Bounding Volume: Exploring Spatial Representation in Computer VisionFrom EverandBounding Volume: Exploring Spatial Representation in Computer VisionNo ratings yet
- R.1 FSR SeriesDocument2 pagesR.1 FSR SeriesRonak PatelNo ratings yet
- Burst IndicatorDocument6 pagesBurst IndicatorRonak PatelNo ratings yet
- Order#201604102124249990 - ShippedDocument2 pagesOrder#201604102124249990 - ShippedRonak PatelNo ratings yet
- Data Sheet: Hov-FsDocument3 pagesData Sheet: Hov-FsRonak PatelNo ratings yet
- Course Name: Computer Aided Manufacturing Course Code: 2ME409 Teaching Scheme: L-3, P-2Document16 pagesCourse Name: Computer Aided Manufacturing Course Code: 2ME409 Teaching Scheme: L-3, P-2Ronak PatelNo ratings yet
- Introduction To CADDocument29 pagesIntroduction To CADRonak Patel100% (1)
- MAPEH Answer KeyDocument6 pagesMAPEH Answer KeyChepie VillalonNo ratings yet
- Mathematics Seven ThirdDocument4 pagesMathematics Seven ThirdJEWEL LUCKY LYN GUINTONo ratings yet
- Autodesk 3ds Max SkraceniceDocument10 pagesAutodesk 3ds Max SkraceniceSam SungNo ratings yet
- 3d The BasicsDocument13 pages3d The Basicsapi-341192425No ratings yet
- Cube SectionDocument2 pagesCube SectionKARLOSNUNNo ratings yet
- Find The Measure of The Indicated Angle.: Skip To Main ContentDocument9 pagesFind The Measure of The Indicated Angle.: Skip To Main ContentJanice BulaoNo ratings yet
- Bentley ContextCapture Editor 1 PDFDocument88 pagesBentley ContextCapture Editor 1 PDFBojan KojovicNo ratings yet
- Computer Graphics PolygonDocument86 pagesComputer Graphics PolygonAyush ModiNo ratings yet
- Corner Point SolutionDocument2 pagesCorner Point SolutionRahulRajRanaNo ratings yet
- Elementary Mathematics Grade 6: Lesson GuideDocument11 pagesElementary Mathematics Grade 6: Lesson GuideGerald Jem BernandinoNo ratings yet
- CGL Lab ManualDocument30 pagesCGL Lab Manualdecember buenoNo ratings yet
- Dynamic Space Frame StructuresDocument96 pagesDynamic Space Frame Structuresg1n2100% (2)
- Geometry and ConstructionsDocument46 pagesGeometry and ConstructionsAuthachai Gokla Chaysang100% (2)
- Computational Geometry With The Rotating Calipers PDFDocument133 pagesComputational Geometry With The Rotating Calipers PDFsonu singhNo ratings yet
- 5es Detailed Lesson Plan. FINALSDocument9 pages5es Detailed Lesson Plan. FINALSJackieAckieee NuñezNo ratings yet
- Extended Goldberg PolyhedraDocument10 pagesExtended Goldberg PolyhedraphiloNo ratings yet
- Gemh 115Document16 pagesGemh 115Surendra RajuNo ratings yet
- Mohid - GrillaDocument6 pagesMohid - GrillagpsoutoNo ratings yet
- MobileTopographerGIS Manual PDFDocument81 pagesMobileTopographerGIS Manual PDFHernanChipNo ratings yet
- CG Mod 3Document51 pagesCG Mod 3Misba nausheenNo ratings yet
- Visualizes and Describes The Different Solid FiguresDocument10 pagesVisualizes and Describes The Different Solid FiguresBel JaNo ratings yet
- 3d Max Design 2012 TutorialDocument56 pages3d Max Design 2012 TutorialJohn Mark OmbinaNo ratings yet
- 07 Voronoi IIDocument43 pages07 Voronoi IIthangqdNo ratings yet
- Math 7 Q3 Module 5Document22 pagesMath 7 Q3 Module 5arnel paghacian100% (1)
- Preliminary Concept in GeometryDocument42 pagesPreliminary Concept in GeometryFREDERICK FUENTESNo ratings yet
- Interior Pixels Along A Scan Line Passing Through A Polygon AreaDocument32 pagesInterior Pixels Along A Scan Line Passing Through A Polygon AreaNivedita kNo ratings yet
- DLL Math Week 1Document10 pagesDLL Math Week 1Mary Grace ContrerasNo ratings yet
- Unwrap A Character in 3DS Max - Sackboy TutorialDocument58 pagesUnwrap A Character in 3DS Max - Sackboy TutorialNesshi S. OliveiraNo ratings yet