You might also like
- Fast Power FlowDocument23 pagesFast Power FlowKornepati SureshNo ratings yet
- Spectral AnalysisDocument19 pagesSpectral AnalysisPatrick SibandaNo ratings yet
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)From EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)No ratings yet
- LaserDocument7 pagesLaserkunal3902323No ratings yet
- Signal Processing: Darian M. Onchis, Pavel RajmicDocument6 pagesSignal Processing: Darian M. Onchis, Pavel RajmicAmir JoonNo ratings yet
- Removal of DCDocument7 pagesRemoval of DCsirisiri100No ratings yet
- Backpropogation LearningDocument9 pagesBackpropogation LearningZemal MalikNo ratings yet
- Tapering and Other Practical Considerations: X (F) Exp IDocument6 pagesTapering and Other Practical Considerations: X (F) Exp Ichrisna27No ratings yet
- Displaying FFT Results - ImgAndRealDocument4 pagesDisplaying FFT Results - ImgAndRealvmacariNo ratings yet
- L 6Document11 pagesL 6mxjoeNo ratings yet
- Chapter3 PDFDocument18 pagesChapter3 PDFdebnathsuman49No ratings yet
- Simulating A DC DC Boost Converter Using Matlab Part 2Document13 pagesSimulating A DC DC Boost Converter Using Matlab Part 2electrotehnica0% (2)
- Phase Lead and Lag CompensatorDocument8 pagesPhase Lead and Lag CompensatorNuradeen MagajiNo ratings yet
- Notes On Control SystemsDocument14 pagesNotes On Control Systemsblzz2netNo ratings yet
- Notes On Fourier Transforms: PHYS 332: Junior Physics Laboratory IIDocument6 pagesNotes On Fourier Transforms: PHYS 332: Junior Physics Laboratory IIFayazKhanPathanNo ratings yet
- Fundamentals of Ultrasonic Phased Arrays - 41-50Document10 pagesFundamentals of Ultrasonic Phased Arrays - 41-50Kevin HuangNo ratings yet
- Acute Pndiode ModelingDocument6 pagesAcute Pndiode ModelingViệt Hoàng NguyễnNo ratings yet
- Control FinalDocument14 pagesControl FinalSaman NazimNo ratings yet
- Effects of Aperture Time and Jitter in A Sampled Data SystemDocument5 pagesEffects of Aperture Time and Jitter in A Sampled Data SystemΠΑΝΑΓΙΩΤΗΣΠΑΝΑΓΟΣNo ratings yet
- Diebolt, Guiraud (2005) A Note On Long Memory Time SeriesDocument10 pagesDiebolt, Guiraud (2005) A Note On Long Memory Time SeriesJoão Victor MachadoNo ratings yet
- Lab#1 Sampling and Quantization Objectives:: Communication II Lab (EELE 4170)Document6 pagesLab#1 Sampling and Quantization Objectives:: Communication II Lab (EELE 4170)MarteNo ratings yet
- EEG PresentationDocument35 pagesEEG PresentationLeena GmalNo ratings yet
- Original Paper by FarrowDocument5 pagesOriginal Paper by FarrowGyan DeepNo ratings yet
- Psuedo Sequence SignalDocument14 pagesPsuedo Sequence Signalzfa91No ratings yet
- Section 7: The Discrete Fourier Transform: Comp30291 Digital Media ProcessingDocument31 pagesSection 7: The Discrete Fourier Transform: Comp30291 Digital Media Processingabhishek1028No ratings yet
- Trans Z AmplifierDocument19 pagesTrans Z AmplifierTrinh TranNo ratings yet
- Bi QuadDocument5 pagesBi QuadBrian LindgrenNo ratings yet
- J30 DAC Transisiton Distortion, Jitter, Slew RateDocument17 pagesJ30 DAC Transisiton Distortion, Jitter, Slew RateАлексей ГрабкоNo ratings yet
- Chapter 4 Pulse Modulation and Digital CodingDocument25 pagesChapter 4 Pulse Modulation and Digital CodingNguyễn Trường GiangNo ratings yet
- 1 Linear Systems, Superposition, and Convolution: Function and The Unit Step Function. The Unit Step Is Defined AsDocument3 pages1 Linear Systems, Superposition, and Convolution: Function and The Unit Step Function. The Unit Step Is Defined AsCris JacksonNo ratings yet
- Sampling and Reconstruction: Analog System Discrete-Time SystemDocument6 pagesSampling and Reconstruction: Analog System Discrete-Time SystemRahul KrishnanNo ratings yet
- P07 LabNotesPt2 and Interference LabDocument37 pagesP07 LabNotesPt2 and Interference Labcliffhanger107No ratings yet
- DSPDocument15 pagesDSPbbmathiNo ratings yet
- Zfactor Spreadsheet VersionDocument35 pagesZfactor Spreadsheet VersionCHANADASNo ratings yet
- Discrete Wavelet Transform Using Circular ConvolutionDocument6 pagesDiscrete Wavelet Transform Using Circular ConvolutionijsretNo ratings yet
- Twisted Pair Transmission Line Distributed Parametrs PDFDocument8 pagesTwisted Pair Transmission Line Distributed Parametrs PDF임광식0% (1)
- 8 Cepstral AnalysisDocument24 pages8 Cepstral Analysissouvik5000No ratings yet
- Software Phase Locked LoopDocument7 pagesSoftware Phase Locked LoopBinyam YohannesNo ratings yet
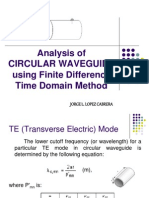
- Circular Waveguide Microwave Engineering ProjectDocument19 pagesCircular Waveguide Microwave Engineering ProjectGouse ModeenNo ratings yet
- Real-Time Time-Varying Frequency Warping Via Short-Time Laguerre TransformDocument6 pagesReal-Time Time-Varying Frequency Warping Via Short-Time Laguerre TransformArtist RecordingNo ratings yet
- KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKDocument21 pagesKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKDeepal PrasankaNo ratings yet
- Omega Arithmetic AlgorithmDocument8 pagesOmega Arithmetic Algorithmankitsmarty2609No ratings yet
- Sampling Pam PWM PPM PCMDocument13 pagesSampling Pam PWM PPM PCMArjun SreedharNo ratings yet
- A General Approach To Derivative Calculation Using WaveletDocument9 pagesA General Approach To Derivative Calculation Using WaveletDinesh ZanwarNo ratings yet
- RombergDocument25 pagesRombergAganinggar EdoNo ratings yet
- An Efficient Parametric Algorithm For Octree TraversalDocument8 pagesAn Efficient Parametric Algorithm For Octree TraversaltritonNo ratings yet
- DFT Vs FFT PDFDocument7 pagesDFT Vs FFT PDFVishal KalkundrikarNo ratings yet
- MIT2 017JF09 p23 PDFDocument8 pagesMIT2 017JF09 p23 PDFAnonymous JEe6LWPNo ratings yet
- Electron Spin ResistanceDocument9 pagesElectron Spin ResistanceAnil PantNo ratings yet
- 6th ChapterDocument23 pages6th ChapterVats AlokNo ratings yet
- Chapter 3 Analysis and Transmission of Signals StudentsDocument80 pagesChapter 3 Analysis and Transmission of Signals StudentsFarooq Bushnaq100% (2)
- Triode Emulator by Dimitri DanyukDocument8 pagesTriode Emulator by Dimitri Danyukt_ca100% (2)
- 8.3.3. Another Example: Chapter 8. Converter Transfer FunctionsDocument3 pages8.3.3. Another Example: Chapter 8. Converter Transfer FunctionsIEQQ02No ratings yet
- Chapter 3Document25 pagesChapter 3Jose C Beraun TapiaNo ratings yet
- 新建 DOCX 文档Document38 pages新建 DOCX 文档刘嘉琦No ratings yet
- The Internationalcongressfor Globalscience AndtechnologyDocument52 pagesThe Internationalcongressfor Globalscience AndtechnologyBobNo ratings yet
- Mechanical Systems and Signal Processing: Yuh-Tay SheenDocument10 pagesMechanical Systems and Signal Processing: Yuh-Tay Sheendado djanatiNo ratings yet
- Swerleins AlgorithmDocument14 pagesSwerleins AlgorithmnomeNo ratings yet
- Derivative From PolyDocument27 pagesDerivative From PolyManu ChakkingalNo ratings yet
- Problem C3.5 Direct Numerical Simulation of The Taylor-Green Vortex at Re 1600Document5 pagesProblem C3.5 Direct Numerical Simulation of The Taylor-Green Vortex at Re 1600Manu ChakkingalNo ratings yet
- Steady Transport Problems: Stabilization Techniques: Problems Modeled by Convection-Diffusion-Reaction EquationsDocument13 pagesSteady Transport Problems: Stabilization Techniques: Problems Modeled by Convection-Diffusion-Reaction EquationsManu ChakkingalNo ratings yet
- Tkaixrha4xgxsfuwkihx2w Iitd Crseoff PDFDocument73 pagesTkaixrha4xgxsfuwkihx2w Iitd Crseoff PDFManu ChakkingalNo ratings yet
- Cricket Practical Exam Support Booklet PDFDocument30 pagesCricket Practical Exam Support Booklet PDFapi-313639383No ratings yet
- Public Administration PDFDocument2 pagesPublic Administration PDFManu ChakkingalNo ratings yet
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Cybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityFrom EverandCybersecurity: The Beginner's Guide: A comprehensive guide to getting started in cybersecurityRating: 5 out of 5 stars5/5 (2)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C01 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C01 ExamRating: 4 out of 5 stars4/5 (1)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- Cybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringFrom EverandCybersecurity: A Simple Beginner’s Guide to Cybersecurity, Computer Networks and Protecting Oneself from Hacking in the Form of Phishing, Malware, Ransomware, and Social EngineeringRating: 5 out of 5 stars5/5 (40)
- Wireless Security Masterclass: Penetration Testing For Network Defenders And Ethical HackersFrom EverandWireless Security Masterclass: Penetration Testing For Network Defenders And Ethical HackersNo ratings yet
- Hacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxFrom EverandHacking: A Beginners Guide To Your First Computer Hack; Learn To Crack A Wireless Network, Basic Security Penetration Made Easy and Step By Step Kali LinuxRating: 4.5 out of 5 stars4.5/5 (67)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- FTTx Networks: Technology Implementation and OperationFrom EverandFTTx Networks: Technology Implementation and OperationRating: 5 out of 5 stars5/5 (1)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- ITIL 4 : Drive Stakeholder Value: Reference and study guideFrom EverandITIL 4 : Drive Stakeholder Value: Reference and study guideNo ratings yet
- The Windows Command Line Beginner's Guide: Second EditionFrom EverandThe Windows Command Line Beginner's Guide: Second EditionRating: 4 out of 5 stars4/5 (4)
- Network+ Study Guide & Practice ExamsFrom EverandNetwork+ Study Guide & Practice ExamsRating: 4.5 out of 5 stars4.5/5 (5)
- Microsoft Certified Azure Fundamentals Study Guide: Exam AZ-900From EverandMicrosoft Certified Azure Fundamentals Study Guide: Exam AZ-900No ratings yet
- ITIL® 4 Drive Stakeholder Value (DSV): Your companion to the ITIL 4 Managing Professional DSV certificationFrom EverandITIL® 4 Drive Stakeholder Value (DSV): Your companion to the ITIL 4 Managing Professional DSV certificationNo ratings yet