You might also like
- Assignement 1-Simulation Test Benches in Cadence: Abstract-This Report Presents Simulation of An Op-Amp inDocument6 pagesAssignement 1-Simulation Test Benches in Cadence: Abstract-This Report Presents Simulation of An Op-Amp inRafid KhanNo ratings yet
- BOOK An Atlas of Rare and Familiar ColourDocument114 pagesBOOK An Atlas of Rare and Familiar ColourMonika Jenowein100% (2)
- Exercise 1Document3 pagesExercise 1Amrinder SetiaNo ratings yet
- Programming Assignment 1Document3 pagesProgramming Assignment 1Keshav AwasthiNo ratings yet
- FortiWLC Study Guide Online PDFDocument606 pagesFortiWLC Study Guide Online PDFkeepalive2010100% (1)
- Microwave Trainer Mod. MW-E/EV: Theory and ExercisesDocument140 pagesMicrowave Trainer Mod. MW-E/EV: Theory and ExercisesMd. Ameer HamjaNo ratings yet
- LAb 1Document8 pagesLAb 1nazmyNo ratings yet
- Antenna Synthesis ReportDocument10 pagesAntenna Synthesis Reportesraahabeeb63No ratings yet
- PAM With Natural SamplingDocument66 pagesPAM With Natural SamplingnctgayarangaNo ratings yet
- MATLAB Script For A Binary ASK With Two Amplitude LevelsDocument3 pagesMATLAB Script For A Binary ASK With Two Amplitude LevelsDinesh KumarNo ratings yet
- Assignment 1Document1 pageAssignment 1sujithaNo ratings yet
- Dispersion Limited Fiber Length - SolutionDocument7 pagesDispersion Limited Fiber Length - SolutionliviuemanuelNo ratings yet
- Dispersion Compensation SolutionDocument4 pagesDispersion Compensation SolutionKiet Pham TanNo ratings yet
- Final Tutorial PDFDocument5 pagesFinal Tutorial PDFAnuj JainNo ratings yet
- ASK DemodulatorDocument24 pagesASK DemodulatorKrista JacksonNo ratings yet
- BCS2213 - Modelling With UPPAALDocument37 pagesBCS2213 - Modelling With UPPAALChian SoonkaiNo ratings yet
- Matlab Code For Windowing TechniquesDocument8 pagesMatlab Code For Windowing TechniquesHemanth S.NNo ratings yet
- Mobile Radio Propagation Small-Scale Fading and MultipathDocument63 pagesMobile Radio Propagation Small-Scale Fading and MultipathRutuja VartaleNo ratings yet
- Form Surfaces VolumesDocument1 pageForm Surfaces Volumesعبد القادر نورNo ratings yet
- Compensator Design Using Bode PlotDocument24 pagesCompensator Design Using Bode PlotShah JayNo ratings yet
- Channel Capacity, Shannon Hartley Law and Shannon's LimitDocument29 pagesChannel Capacity, Shannon Hartley Law and Shannon's LimitstanleyNo ratings yet
- Chapter 4 Digital Modulation - Part 2 - 2 - ContengDocument43 pagesChapter 4 Digital Modulation - Part 2 - 2 - ContengDave Carlo de GuzmanNo ratings yet
- Spectral Estimation NotesDocument6 pagesSpectral Estimation NotesSantanu Ghorai100% (1)
- IES - Electronics Engineering - Network Theory PDFDocument83 pagesIES - Electronics Engineering - Network Theory PDFRaj KamalNo ratings yet
- TP Onde Et PropagationDocument14 pagesTP Onde Et Propagationlina derbikhNo ratings yet
- Exercise 4 - Ans - OnlyDocument2 pagesExercise 4 - Ans - OnlyEng AbdiRahim Khalif AliNo ratings yet
- Ece 3323 Experiment 1Document11 pagesEce 3323 Experiment 1TANQUERO_WW20% (1)
- Mimo PPT PDocument17 pagesMimo PPT PSameer TiwariNo ratings yet
- Assignment TX LineDocument3 pagesAssignment TX LineMynam Meghana0% (1)
- Chapter 8 Microwave FiltersDocument53 pagesChapter 8 Microwave FilterskhyatichavdaNo ratings yet
- Amplitude ModulationDocument14 pagesAmplitude ModulationMuralidhar NakkaNo ratings yet
- Power Spectral Density MatlabDocument3 pagesPower Spectral Density MatlabAnand Raj100% (2)
- AM/FM Radio Training System RTS-4000Document2 pagesAM/FM Radio Training System RTS-4000Alexis NormanNo ratings yet
- DSP Lab 08Document3 pagesDSP Lab 08Usama AhmedNo ratings yet
- Digital Communications: Bajibabu MutteDocument24 pagesDigital Communications: Bajibabu MutteBaji BabuNo ratings yet
- ECE515FL - Activity7 (FIR Filter Design)Document13 pagesECE515FL - Activity7 (FIR Filter Design)SM MecregNo ratings yet
- Week 1 Assignment SolutionDocument7 pagesWeek 1 Assignment SolutionR Chandrasekhar100% (1)
- Design of FIR FilterDocument41 pagesDesign of FIR Filterrsenthil_1976No ratings yet
- Escuela Superior Politécnica De Chimborazo: D= P P U sin (θ) dθ d ∅ PDocument7 pagesEscuela Superior Politécnica De Chimborazo: D= P P U sin (θ) dθ d ∅ PJorge SaNo ratings yet
- Radio PropagationDocument44 pagesRadio PropagationraedapuNo ratings yet
- Rappaport CH 4Document58 pagesRappaport CH 4naeemo100% (1)
- High Range-Resolution TechniquesDocument54 pagesHigh Range-Resolution TechniquesZamanundaIEEENo ratings yet
- Substrate Integrated Waveguide Microwave Encyclopedia Microwaves101Document5 pagesSubstrate Integrated Waveguide Microwave Encyclopedia Microwaves101Dr-Pritam Singh BakariyaNo ratings yet
- Ergodic Capacity of NR X NT Fading MIMO Channel WithDocument6 pagesErgodic Capacity of NR X NT Fading MIMO Channel WithNur A Adam DonyNo ratings yet
- FM 2151Document82 pagesFM 2151Nafeesa SalehNo ratings yet
- Amplitude Modulation and DemodulationDocument5 pagesAmplitude Modulation and DemodulationKrishna RamaNo ratings yet
- Digital Systems of PPT Lecture 1Document59 pagesDigital Systems of PPT Lecture 1Trend HunterNo ratings yet
- Digital Communication 601 - TutorialDocument12 pagesDigital Communication 601 - TutorialHemanth Vinay Kumar0% (1)
- Assignment 7 SolutionsDocument7 pagesAssignment 7 Solutionsshashilu0% (1)
- Solution 2013 Final Exam (1) : Q.1 (A) The Number of Modes in An Optical Fiber, Having Core and CladdingDocument7 pagesSolution 2013 Final Exam (1) : Q.1 (A) The Number of Modes in An Optical Fiber, Having Core and CladdingdwiaryantaNo ratings yet
- Lab10 PDFDocument12 pagesLab10 PDFJoshua HernandezNo ratings yet
- Amplitude Shift Keying (ASK) Modulation MATLAB Simulation: C Amp. Sin (2 Pi FC T) % For Generating Carrier Sine WaveDocument6 pagesAmplitude Shift Keying (ASK) Modulation MATLAB Simulation: C Amp. Sin (2 Pi FC T) % For Generating Carrier Sine WaveAbdullah Al Mamun ParvezNo ratings yet
- Differential Pulse Code Modulation (DPCM)Document11 pagesDifferential Pulse Code Modulation (DPCM)omarhanandehNo ratings yet
- hw4 SolDocument8 pageshw4 Solof300020000% (1)
- 1 5 11. UltrasonicDocument3 pages1 5 11. UltrasonicPeyang PeyongNo ratings yet
- DSP Lab Sheet 2 PDFDocument50 pagesDSP Lab Sheet 2 PDFSreekrishna DasNo ratings yet
- ES PaperDocument22 pagesES PaperRaghu Nath SinghNo ratings yet
- Continuous Wave and Frequency Modulated Radar: 3.1 The Doppler EffectDocument14 pagesContinuous Wave and Frequency Modulated Radar: 3.1 The Doppler Effect2121x3ssssssssssNo ratings yet
- RT-CH 3 - CW and Frequency Modulated RadarDocument18 pagesRT-CH 3 - CW and Frequency Modulated RadarHemant YadavNo ratings yet
- TheoryQues 1995Document8 pagesTheoryQues 1995Shahin AhmedNo ratings yet
- Radio Nav Exam 3Document14 pagesRadio Nav Exam 3momanbh100% (2)
- Overview of Course Delivery/Broad Plan of Course Coverage: Year: 4 Semester: VIIDocument2 pagesOverview of Course Delivery/Broad Plan of Course Coverage: Year: 4 Semester: VIIJohnNo ratings yet
- Association BrochureDocument18 pagesAssociation BrochureJohnNo ratings yet
- Biology Computers Mechanical: AstronomyDocument1 pageBiology Computers Mechanical: AstronomyJohnNo ratings yet
- 英文版 PDFDocument13 pages英文版 PDFSeverina MallariNo ratings yet
- Colors in Textile: An Introduction: Color ScienceDocument10 pagesColors in Textile: An Introduction: Color ScienceWaqas AkramNo ratings yet
- Atomic Structure: Chapter - 1Document14 pagesAtomic Structure: Chapter - 1Cube WorldNo ratings yet
- DLL Cot 1Document2 pagesDLL Cot 1Mignonette Malabayabas100% (6)
- Coe Course Module Illumination Part 1Document89 pagesCoe Course Module Illumination Part 1Kc Kirsten Kimberly MalbunNo ratings yet
- 915Mhz Rob Antenna: Technical Data SheetDocument5 pages915Mhz Rob Antenna: Technical Data SheetyugenmyoNo ratings yet
- Specifying Color by The Natural Colour System (NCS) : Standard Practice ForDocument9 pagesSpecifying Color by The Natural Colour System (NCS) : Standard Practice ForFernando Da RosNo ratings yet
- Analysis of 2x2 Mirostrip Patch Array Antenna Usin-46-48Document3 pagesAnalysis of 2x2 Mirostrip Patch Array Antenna Usin-46-48amey salunkeNo ratings yet
- Omega Lighting C3212TW INC PAR-38 Paracone Downlight Spec Sheet 1-86Document2 pagesOmega Lighting C3212TW INC PAR-38 Paracone Downlight Spec Sheet 1-86Alan MastersNo ratings yet
- Dark Plasma TheoryDocument14 pagesDark Plasma TheoryJay AlfredNo ratings yet
- Radiographic Inspection Report SheetDocument1 pageRadiographic Inspection Report SheetMike BoyesNo ratings yet
- A Dual-Linear Polarized Highly Isolated CrossedDocument4 pagesA Dual-Linear Polarized Highly Isolated CrossedPhạm GiangNo ratings yet
- Color Part 1 QuestionsDocument6 pagesColor Part 1 Questionsapi-268171789No ratings yet
- Interior Lightning SystemsDocument11 pagesInterior Lightning SystemsMedha GuptaNo ratings yet
- Dipole Antenna Ruler: © IT Luxembourg - Visit WWW - Itluxembourg.lu/siteDocument1 pageDipole Antenna Ruler: © IT Luxembourg - Visit WWW - Itluxembourg.lu/siteYimmeeeNo ratings yet
- PMR446Document2 pagesPMR446SultanNo ratings yet
- Ultraviolet Analysis of Gold Nanorod and Nanosphere SolutionsDocument7 pagesUltraviolet Analysis of Gold Nanorod and Nanosphere SolutionsDavidRamirezNo ratings yet
- SS-CP-38-1999 - CP For Artificial Lighting in BuildingsDocument68 pagesSS-CP-38-1999 - CP For Artificial Lighting in BuildingsTô Kiên TrungNo ratings yet
- Binisaya Sa Mga KolorDocument2 pagesBinisaya Sa Mga KolorDirk Van WrightNo ratings yet
- Ncert ch2 Chemistry Class 11Document44 pagesNcert ch2 Chemistry Class 11Karan ManglaNo ratings yet
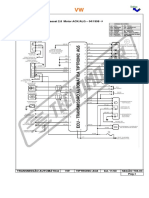
- Passat 2.8 Esq. EletDocument1 pagePassat 2.8 Esq. EletwaggcasNo ratings yet
- 062 - Radio Navigation - AnswersDocument86 pages062 - Radio Navigation - AnswersEASA ATPL Question Bank100% (1)
- Lesson 4Document3 pagesLesson 4Ginn S. SalesNo ratings yet
- Basic MCA-4300 - Technical Data Sheet - LLEDO GroupDocument3 pagesBasic MCA-4300 - Technical Data Sheet - LLEDO Groupjuan__davilaNo ratings yet
- Antenna Design and Simulation For 2x2 MIMO System For IEEE-802.11a ApplicationDocument7 pagesAntenna Design and Simulation For 2x2 MIMO System For IEEE-802.11a ApplicationValery ShevchenkoNo ratings yet
- Lasers in Maxillofacial Surgery and Dentistry 0865775664 PDFDocument168 pagesLasers in Maxillofacial Surgery and Dentistry 0865775664 PDFIrina OneaNo ratings yet
- Safety, Diode Lasers, HeNe Lasers, Drive, Info, PartsDocument130 pagesSafety, Diode Lasers, HeNe Lasers, Drive, Info, Partsmechanix60No ratings yet
- Atomic Structure NumericalsDocument6 pagesAtomic Structure Numericalssupermannn1972No ratings yet
- Sodium CGL 250WDocument4 pagesSodium CGL 250WJuju R ShakyaNo ratings yet