You might also like
- Error Detection and CorrectionDocument36 pagesError Detection and CorrectionWanjiku Thuo100% (3)
- Linear Algebra: Dama50 - Mathematics For Machine LearningDocument29 pagesLinear Algebra: Dama50 - Mathematics For Machine LearningPapadakis ChristosNo ratings yet
- Math Paper 3 Practice MSDocument47 pagesMath Paper 3 Practice MSRaahish KalariaNo ratings yet
- Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFDocument2 pagesSolution Manual For Modern Processor Design by John Paul Shen and Mikko H. Lipasti PDFtargetiesNo ratings yet
- Programming and Data Structures: Debasis SamantaDocument46 pagesProgramming and Data Structures: Debasis SamantaRaJu SinGhNo ratings yet
- Game of Thrones Slots Casino Hack Generator Coins No Human VerificationDocument3 pagesGame of Thrones Slots Casino Hack Generator Coins No Human VerificationMark yozNo ratings yet
- Dama50 Vector Calculus-8Document1 pageDama50 Vector Calculus-8Δημήτριος ΡωμηόςNo ratings yet
- Discrete StructuresDocument165 pagesDiscrete StructuresBramhesh AptekarNo ratings yet
- AEPP EXAMS EXERCISES.v1Document7 pagesAEPP EXAMS EXERCISES.v1GeorgePapaloukasNo ratings yet
- Βγμν Μπαρλας Κεφ1 ΑλγεβραDocument13 pagesΒγμν Μπαρλας Κεφ1 ΑλγεβραMousiou Maria0% (1)
- Extended Hamming Code PDFDocument2 pagesExtended Hamming Code PDFKimNo ratings yet
- ΑΕΠΠ, Δομή ΕπιλογήςDocument5 pagesΑΕΠΠ, Δομή ΕπιλογήςGeorgePapaloukasNo ratings yet
- SQL For BeginnersDocument7 pagesSQL For Beginnersapi-3736443No ratings yet
- Solution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastiDocument11 pagesSolution Manual For Modern Processor Design by John Paul Shen and Mikko H. LipastitargetiesNo ratings yet
- Math Studies ExercisesDocument6 pagesMath Studies ExercisesKonstantinos TakoNo ratings yet
- Lists in Python LanguageDocument15 pagesLists in Python LanguageRam KrishNo ratings yet
- 053 - Computer GraphicsDocument37 pages053 - Computer GraphicsRejithaVijayachandranNo ratings yet
- Applications of Linear AlgebraDocument4 pagesApplications of Linear AlgebraTehmoor AmjadNo ratings yet
- The Greenfoot ProgrammersDocument30 pagesThe Greenfoot ProgrammersYantiNo ratings yet
- (20:56:35) - PDF Download Kotlin Programming: The Big Nerd Ranch Guide Download Books ReadyDocument2 pages(20:56:35) - PDF Download Kotlin Programming: The Big Nerd Ranch Guide Download Books ReadyqwertyuiopNo ratings yet
- 2 RDBMergeDocument3 pages2 RDBMergeNishant ChughNo ratings yet
- Algorithms & FlowchartsDocument37 pagesAlgorithms & FlowchartsChris James100% (1)
- Volume IntegrationDocument19 pagesVolume Integrationarjay peñalesNo ratings yet
- Python Programming 101 PDFDocument108 pagesPython Programming 101 PDFArt DollosaNo ratings yet
- Pseudocode ExamplesDocument7 pagesPseudocode ExamplesStavros86No ratings yet
- Conic Sections ReviewDocument6 pagesConic Sections ReviewMichelle Hsieh100% (1)
- Chapter 5.3-Mulitple Linear RegressionDocument26 pagesChapter 5.3-Mulitple Linear RegressionJonabel DajesNo ratings yet
- Supervised Learning - Regression - AnnotatedDocument97 pagesSupervised Learning - Regression - AnnotatedHala MNo ratings yet
- 8085 Microprocessor ManualDocument56 pages8085 Microprocessor Manualaced123100% (1)
- Polar Equations and GraphsDocument24 pagesPolar Equations and GraphsZazliana Izatti100% (1)
- Chem ADocument58 pagesChem AeliasguitarNo ratings yet
- Ooad Record-1Document32 pagesOoad Record-1hemanthraju nagarajuNo ratings yet
- Integration Exercises (With Answer Key)Document22 pagesIntegration Exercises (With Answer Key)Denise CedeñoNo ratings yet
- Scatter Plots and Line of Best Fit Line of BestDocument2 pagesScatter Plots and Line of Best Fit Line of Bestapi-16254560No ratings yet
- Big O MIT PDFDocument9 pagesBig O MIT PDFJoanNo ratings yet
- Maths MattersDocument5 pagesMaths MattersSteve Alexander100% (1)
- Trapezoidal RuleDocument2 pagesTrapezoidal RuleMaajith MarzookNo ratings yet
- Geo GebraDocument21 pagesGeo GebraMatematik ZadeNo ratings yet
- Winter HW 2015 Math HL G12Document9 pagesWinter HW 2015 Math HL G12MishaZetov100% (1)
- E R DiagramsDocument5 pagesE R DiagramsDivansh Sood0% (1)
- Exercise 4.7, 4.9 Null Space, Rank of MatrixDocument9 pagesExercise 4.7, 4.9 Null Space, Rank of Matrixsaqlain abbasNo ratings yet
- Linear Regression Hands-OnDocument27 pagesLinear Regression Hands-OnNishant RandevNo ratings yet
- Discrete Mathematics Using A Computer - 06 - Propositional Logic NotesDocument31 pagesDiscrete Mathematics Using A Computer - 06 - Propositional Logic NoteskanakkshetriNo ratings yet
- Lecture07 OpenGL InteractionDocument49 pagesLecture07 OpenGL Interactiondigz6666No ratings yet
- BINOMIAL SeriesDocument25 pagesBINOMIAL SeriesBench AminNo ratings yet
- FEM Assignment 1Document10 pagesFEM Assignment 1sandeshpetareNo ratings yet
- Working in The Forms Developer EnvironmentDocument25 pagesWorking in The Forms Developer EnvironmentAditya Pavan MandavaNo ratings yet
- Properties of The Trinomial DistributionDocument2 pagesProperties of The Trinomial DistributionPerry01No ratings yet
- Using Use Case DiagramsDocument24 pagesUsing Use Case DiagramsPradeep Singh MaithaniNo ratings yet
- Lab 4 (Thu) - Attempt Review PDFDocument4 pagesLab 4 (Thu) - Attempt Review PDFjair2018No ratings yet
- Trignometry and Complex Numbers Importent Questions List For Diploma Holders PDFDocument5 pagesTrignometry and Complex Numbers Importent Questions List For Diploma Holders PDFSivaramakrishna NallajarlaNo ratings yet
- MIT18 06S10 Final AnswersDocument14 pagesMIT18 06S10 Final AnswersandreaskailinaNo ratings yet
- 0670 Introduction To Calculus Volume 2Document632 pages0670 Introduction To Calculus Volume 2Alan AnggaraNo ratings yet
- Brief Introduction To ProofsDocument9 pagesBrief Introduction To ProofsPotado TomadoNo ratings yet
- Algebra FormulaDocument1 pageAlgebra FormulaMargzAnumaNo ratings yet
- Test 21kinematics20151002Document26 pagesTest 21kinematics20151002laguiiniNo ratings yet
- Strauss Calculus AnswersDocument47 pagesStrauss Calculus AnswersDeepak SrivasNo ratings yet
- 3D Analytical GeometryDocument3 pages3D Analytical GeometryMaths Home Work 123100% (1)
- Homogeneous TransformDocument12 pagesHomogeneous TransformAnonymous G9t3IVfL4JNo ratings yet
- 01 TransformationsDocument16 pages01 TransformationsAnonymous 9q5GEfm8INo ratings yet
- Smart Dustbin Report PaperDocument9 pagesSmart Dustbin Report PaperAbhishek JhaNo ratings yet
- Materi & System RequirementDocument5 pagesMateri & System RequirementRaden Budi HermawanNo ratings yet
- Learning Spring Boot 2 0 Microservices 34Document321 pagesLearning Spring Boot 2 0 Microservices 34Rupak Kumar100% (1)
- Tally Errors Solutions Data IssueDocument5 pagesTally Errors Solutions Data IssueArchana BholeNo ratings yet
- Paralel Port TshootingDocument13 pagesParalel Port TshootingDrift GeeNo ratings yet
- Filing SystemsDocument47 pagesFiling SystemsThanThanscc0% (1)
- Arduino Persistence of Vision DisplayDocument7 pagesArduino Persistence of Vision Displayolaolaolaola123No ratings yet
- Data Structures & Algorithms (2019-2020)Document4 pagesData Structures & Algorithms (2019-2020)Aakash ShresthaNo ratings yet
- Crack The InterviewDocument456 pagesCrack The InterviewBharat TripathiNo ratings yet
- MVVM - Commands, RelayCommands and EventToCommandDocument2 pagesMVVM - Commands, RelayCommands and EventToCommandrickyarya2000No ratings yet
- Eset UninstallDocument5 pagesEset UninstallfoeadNo ratings yet
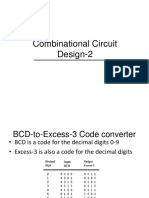
- Combinational Circuit Design-2Document36 pagesCombinational Circuit Design-2mikko intalNo ratings yet
- Mysql PN Performance 101Document109 pagesMysql PN Performance 101duongatnaNo ratings yet
- B RoboCell Usb v47 (0210)Document86 pagesB RoboCell Usb v47 (0210)a2009sNo ratings yet
- Microprocessor Systems & Interfacing Lab Project Proposal: Fall 2019Document3 pagesMicroprocessor Systems & Interfacing Lab Project Proposal: Fall 2019Ishaq GhaznaviNo ratings yet
- ZeroAccess Rootkit Analysis PDFDocument9 pagesZeroAccess Rootkit Analysis PDFzositeNo ratings yet
- Requetes SQLDocument3 pagesRequetes SQLabc 123No ratings yet
- AIMMS Modeling Guide - Linear Programming TricksDocument16 pagesAIMMS Modeling Guide - Linear Programming TricksgjorhugullNo ratings yet
- Object Oriented PLC ProgrammingDocument80 pagesObject Oriented PLC ProgrammingPHICHAIYUT PHONGSOMBUNNo ratings yet
- Research Details of Department M.C.A. (Computer Application)Document10 pagesResearch Details of Department M.C.A. (Computer Application)Anonymous UjEPpvYDNo ratings yet
- CABLS95BDocument49 pagesCABLS95BgnohmNo ratings yet
- Hello World 2Document5 pagesHello World 2ergtewfgergNo ratings yet
- Chapter 3 C#Document73 pagesChapter 3 C#Kassawmar AyalewNo ratings yet
- Unit 04Document68 pagesUnit 04Kamal MittalNo ratings yet
- TG 55 User GuideDocument157 pagesTG 55 User GuideAkshay SwaminathanNo ratings yet
- Trigedit ReadmeDocument4 pagesTrigedit ReadmeMIHAINo ratings yet
- ,Document1 page,Aid FatušićNo ratings yet
- Software Engineering Question Bank With Answers12Document4 pagesSoftware Engineering Question Bank With Answers12Amrutamoon0% (1)
- 5.4.1.2 Packet Tracer - Skills Integration Challenge Instructions IG PDFDocument10 pages5.4.1.2 Packet Tracer - Skills Integration Challenge Instructions IG PDFblado1No ratings yet