You might also like
- Stepper MotorDocument18 pagesStepper MotorLasantha Abeykoon67% (3)
- What Is A Stepper MotorDocument12 pagesWhat Is A Stepper MotorteddiyfentawNo ratings yet
- Single Phase Induction Motor and Stepper MotorDocument11 pagesSingle Phase Induction Motor and Stepper MotorManthan deshmukhNo ratings yet
- Stepper, Reluctance Motors ExplainedDocument37 pagesStepper, Reluctance Motors Explainedkaran nirmala gajanan shindeNo ratings yet
- Stepper MotorsDocument12 pagesStepper MotorsOlkan Ilter TaşNo ratings yet
- Module 5 ElectricalDocument22 pagesModule 5 ElectricalSKANDAN BHARADWAJNo ratings yet
- Module1.Stepper Motor and Its ControlDocument79 pagesModule1.Stepper Motor and Its ControlOmkar GuptaNo ratings yet
- Stepper Motor AssignmentDocument12 pagesStepper Motor AssignmentShyamu29No ratings yet
- Stepper MotorDocument7 pagesStepper MotorTaufique alahi PrantoNo ratings yet
- Stepper Motor CharacteristicsDocument10 pagesStepper Motor CharacteristicssatyabannayakNo ratings yet
- Stepper Motor Basics and OperationDocument44 pagesStepper Motor Basics and OperationHansean WidjajaNo ratings yet
- Stepper MotorDocument11 pagesStepper MotorhaaenNo ratings yet
- MECHATRONICS IN ROBOTICS: ELECTRICAL DRIVESDocument34 pagesMECHATRONICS IN ROBOTICS: ELECTRICAL DRIVESDeepa Ragav RNo ratings yet
- Switched Reluctance Motor Construction and Working PrincipleDocument10 pagesSwitched Reluctance Motor Construction and Working PrincipleHAMID SULIAMANNo ratings yet
- Switched Reluctance Motor PDFDocument79 pagesSwitched Reluctance Motor PDFHAMID SULIAMANNo ratings yet
- motorDocument19 pagesmotorRabi khanNo ratings yet
- Types of Stepper MotorDocument6 pagesTypes of Stepper MotorFazal Aziz WaliNo ratings yet
- Stepper Motor: Working, Cosntruction, Types, Advantages and DisadvantagesDocument5 pagesStepper Motor: Working, Cosntruction, Types, Advantages and DisadvantagesMd Samee MNo ratings yet
- EPO640 Electrical Drives: BLDC and Stepper MotorsDocument36 pagesEPO640 Electrical Drives: BLDC and Stepper MotorsZariz ZakianNo ratings yet
- Stepper Motors BasicsDocument18 pagesStepper Motors BasicsAhmed KalasNo ratings yet
- Unit 3Document64 pagesUnit 3Yuvan Krishnan VNo ratings yet
- Unit I (SM) PDFDocument89 pagesUnit I (SM) PDFshiva sai donthulaNo ratings yet
- The Difference Between Asynchronous and Synchronous MotorsDocument6 pagesThe Difference Between Asynchronous and Synchronous MotorsShiva Kumar ReddyNo ratings yet
- Special Electrical Machines Ee2403 PDFDocument16 pagesSpecial Electrical Machines Ee2403 PDFsamyramu100% (3)
- Brushless DC MotorDocument13 pagesBrushless DC MotorYova PrameswariNo ratings yet
- What Is A Stepper MotorDocument8 pagesWhat Is A Stepper Motorabhishekbarve10No ratings yet
- H Assignment 2Document5 pagesH Assignment 2Isuru KodikaraNo ratings yet
- Electric DrivesDocument16 pagesElectric DrivesvigneshNo ratings yet
- Special Motors AssignmentDocument11 pagesSpecial Motors Assignmentnelis01No ratings yet
- 1 - Switched Reluctance MotorDocument5 pages1 - Switched Reluctance MotorHARSHIT TOMARNo ratings yet
- Stepper Motor: From Wikipedia, The Free EncyclopediaDocument42 pagesStepper Motor: From Wikipedia, The Free EncyclopediaJoeson RosarioNo ratings yet
- Arbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorDocument12 pagesArbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorEphrem DanielNo ratings yet
- Ac MotorDocument17 pagesAc Motorthebeast.suazoNo ratings yet
- Skip To ContentDocument17 pagesSkip To Contentkidanemariam teseraNo ratings yet
- Construction and control of PM, VR and hybrid stepper motorsDocument5 pagesConstruction and control of PM, VR and hybrid stepper motorsSew KariyawasamNo ratings yet
- STEPPER MOTOR GUIDEDocument10 pagesSTEPPER MOTOR GUIDEMohammed SiddiqueNo ratings yet
- Stepper Motor GuideDocument13 pagesStepper Motor Guidejit dharaNo ratings yet
- Electrical Drives Guide for RoboticsDocument14 pagesElectrical Drives Guide for RoboticsAbhijith JoseNo ratings yet
- Ee 2403 Special Electrical MachinesDocument21 pagesEe 2403 Special Electrical MachinesSurya KrishnanNo ratings yet
- A Stepper, or Stepping Motor ConvertsDocument25 pagesA Stepper, or Stepping Motor ConvertsFaizan SaeedNo ratings yet
- Stepper Motor - Types, Advantages and ApplicationsDocument2 pagesStepper Motor - Types, Advantages and ApplicationsBilalNo ratings yet
- Stepper Motor DFLTDocument16 pagesStepper Motor DFLTvisdhoniNo ratings yet
- Ac MotorsDocument10 pagesAc MotorsJonas Marco CagueteNo ratings yet
- Special Purpose Motors and Control DevicesDocument43 pagesSpecial Purpose Motors and Control DevicesDominick BasNo ratings yet
- Step Motor Engineer (2002 Catlog)Document13 pagesStep Motor Engineer (2002 Catlog)engineer86No ratings yet
- Shaded Pole Induction MotorDocument7 pagesShaded Pole Induction MotorRahul BhumkarNo ratings yet
- Hysteresis Motors 1Document10 pagesHysteresis Motors 1Nelis OosthuizenNo ratings yet
- Synchronous Motor Types and OperationDocument14 pagesSynchronous Motor Types and OperationVishnu Nayak100% (1)
- TechportDocument6 pagesTechportMaureen TatadNo ratings yet
- of SRMDocument22 pagesof SRMGopoji Dayanand71% (7)
- Stepper MotorDocument16 pagesStepper Motorpartha DasNo ratings yet
- EE2403 - Special Electrical Machines Questions and AnswersDocument15 pagesEE2403 - Special Electrical Machines Questions and AnswerskesavantNo ratings yet
- #5 Module 5Document52 pages#5 Module 5anishdeshmukh108No ratings yet
- What is the function of commutator in DC motorDocument4 pagesWhat is the function of commutator in DC motorSovanNo ratings yet
- Electric Drives - DC Motors (Description and Applications) : Brushed (Field Energised) Motors (Motors Using Wound Rotors)Document6 pagesElectric Drives - DC Motors (Description and Applications) : Brushed (Field Energised) Motors (Motors Using Wound Rotors)Vasudev SurendranNo ratings yet
- Brushless DC Motors: An Introduction to Their Construction, Working Principles and AdvantagesDocument21 pagesBrushless DC Motors: An Introduction to Their Construction, Working Principles and AdvantagesSRL MECHNo ratings yet
- Direct Current MotorDocument5 pagesDirect Current Motorjamesbergano18No ratings yet
- Reluctance MotorDocument27 pagesReluctance MotorMax Sedric L LaylayNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Low Cement Dense Castables / Calcestruzzi Densi A Basso Cemento / Betons Denses A Basse Teneur en Ciment / Dichte Lc-BetoneDocument2 pagesLow Cement Dense Castables / Calcestruzzi Densi A Basso Cemento / Betons Denses A Basse Teneur en Ciment / Dichte Lc-Betoneasad razaNo ratings yet
- 2323-PL 4 Nov 2014Document38 pages2323-PL 4 Nov 2014Raka AjaNo ratings yet
- Actom High Voltage Outdoor DisconnectorsDocument8 pagesActom High Voltage Outdoor Disconnectorsjoydeep_d3232No ratings yet
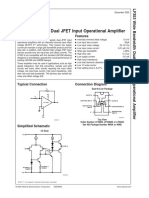
- Datasheet LF 353Document14 pagesDatasheet LF 353Anggridho MeilandanuNo ratings yet
- URC 22В-7 UNIVERSAL REMOTE CONTROL USER'S MANUALDocument18 pagesURC 22В-7 UNIVERSAL REMOTE CONTROL USER'S MANUALlocvs50% (2)
- 0 450 La4262Document3 pages0 450 La4262Bùi Minh TuấnNo ratings yet
- Pic Programer RCDDocument8 pagesPic Programer RCDvikixxxNo ratings yet
- A High-Efficiency CMOS Voltage DoublerDocument7 pagesA High-Efficiency CMOS Voltage Doublerluctuyetki102No ratings yet
- Electrodes & Sensors 2017-10-03 CompleteDocument32 pagesElectrodes & Sensors 2017-10-03 Completeprince kumarNo ratings yet
- Experiment # 01 Maximum Power Transfer Theorem ObjectivesDocument43 pagesExperiment # 01 Maximum Power Transfer Theorem ObjectiveskarachietNo ratings yet
- SMPSDocument29 pagesSMPSwcdma1230% (2)
- Problem Solved! Fender Hot RodDocument14 pagesProblem Solved! Fender Hot RodnioprenNo ratings yet
- Diode Clamping CircuitsDocument4 pagesDiode Clamping CircuitsftafedeNo ratings yet
- Kelly K BL User ManualDocument22 pagesKelly K BL User ManualMuhammad Irfan DzakyNo ratings yet
- Microstructure Evolution of HP40-Nb Alloys During Aging UnderDocument8 pagesMicrostructure Evolution of HP40-Nb Alloys During Aging UnderAndrea CalderaNo ratings yet
- IO Mod DC InputDocument2 pagesIO Mod DC InputAdérito AguiarNo ratings yet
- Cargador de Baterias 12V 4ahDocument4 pagesCargador de Baterias 12V 4ahRamón Antonio Rodríguez DíazNo ratings yet
- Noise and InterferenceDocument49 pagesNoise and InterferenceDhananjay ThakurNo ratings yet
- Section III 12 TemperatureDocument27 pagesSection III 12 Temperaturedanwilliams85No ratings yet
- Chapter 6-Voltage RegulatorDocument36 pagesChapter 6-Voltage RegulatorSumaya ShinosNo ratings yet
- MOTORBIKE ANTI-THEFT ALARM WITH SPARK CUT OFF AND TILT SENSORDocument4 pagesMOTORBIKE ANTI-THEFT ALARM WITH SPARK CUT OFF AND TILT SENSORArjun H NambiarNo ratings yet
- Ncer Unit1 WTRMRK PDFDocument5 pagesNcer Unit1 WTRMRK PDFshylaja9No ratings yet
- 4 Bit Binary Adder (Mini-Calculator)Document9 pages4 Bit Binary Adder (Mini-Calculator)Amitabh Chandra AruniNo ratings yet
- Question Paper Code:: (10 2 20 Marks)Document2 pagesQuestion Paper Code:: (10 2 20 Marks)AbdulAzizNo ratings yet
- Electrical Stencil - IEC SymbolsDocument13 pagesElectrical Stencil - IEC SymbolsLaurence Malanum80% (5)
- ECE 305 Homework: Week 4Document2 pagesECE 305 Homework: Week 4abuzar raoNo ratings yet
- W27C512 45Z PDFDocument20 pagesW27C512 45Z PDFAbdelkrim RamdaneNo ratings yet
- Battery Less PhoneDocument7 pagesBattery Less PhoneNaveen Gowdru Channappa50% (2)
- 375612fb PDFDocument24 pages375612fb PDFAbood AliNo ratings yet
- High-Voltage High and Low Side Driver: DescriptionDocument9 pagesHigh-Voltage High and Low Side Driver: DescriptionLucas BrendoNo ratings yet