You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Voidheart Symphony - Psychic Rebellion in The Shadows of The CityDocument316 pagesVoidheart Symphony - Psychic Rebellion in The Shadows of The CityKürşat ÇNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Manual De12t p126Document184 pagesManual De12t p126javed samaa100% (1)
- Operating Instructions Diesel TruckDocument268 pagesOperating Instructions Diesel TruckIonut GrozaNo ratings yet
- Fire Pump Pressure SettingsDocument2 pagesFire Pump Pressure SettingsJhe Inibam100% (1)
- Chivalry in Late Medieval FlorenceDocument405 pagesChivalry in Late Medieval FlorenceOn InfantryNo ratings yet
- Methods of Data PresentationDocument47 pagesMethods of Data PresentationNelson Tejara100% (3)
- Underground Alien Bio Lab at Dulce The Bennewitz Ufo PapersDocument204 pagesUnderground Alien Bio Lab at Dulce The Bennewitz Ufo PapersCyborg WarNo ratings yet
- Business Models in Emerging Technologies: Data Science, AI, and BlockchainDocument30 pagesBusiness Models in Emerging Technologies: Data Science, AI, and BlockchainCharlene KronstedtNo ratings yet
- Feasibility Study of LED Bulbs FactoryDocument2 pagesFeasibility Study of LED Bulbs FactoryAmjad AtiqueNo ratings yet
- Sample Introductions To Surveys and QuestDocument2 pagesSample Introductions To Surveys and Questlaikeng95100% (5)
- Exit SurveyDocument2 pagesExit SurveyFaraz BachaNo ratings yet
- Health Monitoring and Management Using Internet-of-Things (IOT)Document6 pagesHealth Monitoring and Management Using Internet-of-Things (IOT)Faraz BachaNo ratings yet
- Project Supervisor: Dr. Muhammad Salman Khan: Health Monitoring and Management Using Internet-of-Things (IOT)Document20 pagesProject Supervisor: Dr. Muhammad Salman Khan: Health Monitoring and Management Using Internet-of-Things (IOT)Faraz BachaNo ratings yet
- Health Monitoring System Using Iot (Internet of Things) : FindingsDocument1 pageHealth Monitoring System Using Iot (Internet of Things) : FindingsFaraz BachaNo ratings yet
- Classification ExampleDocument12 pagesClassification ExampleFaraz BachaNo ratings yet
- Pundit Live Array Cue Cards PDFDocument31 pagesPundit Live Array Cue Cards PDFhamidaffandyNo ratings yet
- Science 8 q1 w3 1 Law of InertiaDocument4 pagesScience 8 q1 w3 1 Law of InertiaMICAH NORADANo ratings yet
- EulaDocument23 pagesEulaJuan VelásquezNo ratings yet
- Muqeema - 10574 - Ecd Lab Cep ReportDocument16 pagesMuqeema - 10574 - Ecd Lab Cep ReportMona AlisaNo ratings yet
- 4023 EHT Dataark JustertSats 2016-05-03 LV ScreenDocument3 pages4023 EHT Dataark JustertSats 2016-05-03 LV ScreenmiriambenincaNo ratings yet
- Introducing Cultural Historical Theory: Main Concepts and Principles of Genetic Research MethodologyDocument41 pagesIntroducing Cultural Historical Theory: Main Concepts and Principles of Genetic Research MethodologyNikolai VeresovNo ratings yet
- Assignment-1 Computer Aided Manufacturing ME-418Document21 pagesAssignment-1 Computer Aided Manufacturing ME-418Prateek Kharbanda 79No ratings yet
- Ring - Sizing (Scale Reference)Document3 pagesRing - Sizing (Scale Reference)pat rodriguezNo ratings yet
- Class 6 Syllabus 2023 FinalDocument25 pagesClass 6 Syllabus 2023 Finalswetamaz83No ratings yet
- Theory II-lecture 1Document28 pagesTheory II-lecture 1Lowie Torres TonioNo ratings yet
- Información: Estado Tipo de Participantes Rangos de EdadDocument11 pagesInformación: Estado Tipo de Participantes Rangos de EdadAlondraNo ratings yet
- LIC Lab ManualDocument102 pagesLIC Lab Manualkunaraj100% (2)
- PROJECT REPORT Personal Selling PDFDocument19 pagesPROJECT REPORT Personal Selling PDFHimaja GharaiNo ratings yet
- Corporate Well Being British English TeacherDocument11 pagesCorporate Well Being British English TeacherOlfa MabroukNo ratings yet
- Grenzebach Patent 2005Document8 pagesGrenzebach Patent 2005Muhammed BALIKÇINo ratings yet
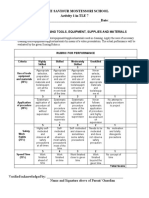
- Divine Saviour Montessori School Activity 1 in TLE 7 Name: - Date: - Grade & Section: 7Document1 pageDivine Saviour Montessori School Activity 1 in TLE 7 Name: - Date: - Grade & Section: 7Edchel EspeñaNo ratings yet
- Tcs Ninja SyllabusDocument8 pagesTcs Ninja SyllabusVijayPrajapatiNo ratings yet
- ED 27X User ManualDocument11 pagesED 27X User ManualAsian InternationalNo ratings yet
- Hot Insulation Supports ENCI E16 FOR N:Na Mimed Storage TanksDocument3 pagesHot Insulation Supports ENCI E16 FOR N:Na Mimed Storage TankssahilNo ratings yet